Profesor Facultad de Ingeniería, Universidad Distrital Francisco José de Caldasy encargado de la dirección del grupo GCEM de la Facultad de Ingeniería. Coordinador del grupo de geosensores adscrito a GICOGE.
Profesor Universidad Distrital Francisco José de Caldas. Fundador y director del Grupo Internacional de Investigación en Informática, Comunicaciones y Gestión del Conocimiento (GICOGE). PhD. en Informática, Universidad de Oviedo.
Un sistema típico de Medición y Detección mediante Láser (light detection and ranging, LIDAR) transmite muy rápidamente pulsos de luz que se reflejan del terreno y de otros objetos obteniéndose en el sistema LIDAR puntos de las alturas o puntos de elevación. El pulso de vuelta se convierte de fotones a impulsos eléctricos y se recoge por un registrador de datos de alta velocidad. Dada una relación para la velocidad de la luz, los intervalos del tiempo entre la transmisión y la recepción de los pulsos se pueden calcular con el fin de conocer las alturas de los puntos de un terreno, estos intervalos de tiempo se convierten a unidades de distancia con base en la información posicional obtenida mediante los receptores del Sistema de Posicionamiento Global (global positioning system, GPS) ubicados en el medio aerotransportado y la Unidad de Medida Inercial (inertial measurement unit, IMU), que registra constantemente la altitud del avión. Los sistemas LIDAR recogen datos de la posición y de la elevación en unos intervalos bien definidos. Los datos de LIDAR que se obtienen, constituyen una red muy densa de datos correspondientes a las posiciones de la elevación, cuya exactitud es una función de la altura del vuelo, del diámetro del rayo láser (dependiente del sistema), de la calidad de los datos, del GPS, de la IMU y de los métodos utilizados en el post-procesamiento. Se pueden alcanzar exactitudes de ±15cm (horizontalmente) y de ± 15cm (verticalmente), no obstante se han logrado exactitudes por encima de los 7cm (verticalmente).
Plabras clave: Detección, imagen, láser, LIDAR, modelo, pulsación, sistema y urbano.
A typical LIDAR system rapidly transmits pulses of light that reflect off the terrain and other height objects. The return pulse is converted from photons to electrical impulses and collected by a high-speed data recorder. Since the formula for the speed of light is well known, time intervals from transmission to collection are easily derived. Time intervals are then converted to distance based on positional information obtained from GPS receivers and the on-board Inertial Measurement Unit (IMU) that constantly records the attitude of the aircraft. LIDAR systems collect positional and elevation data at pre-defined intervals. The resulting LIDAR data is a very dense network of elevation postings. The accuracy of LIDAR data is a function of flying height, laser beam diameter (system dependent), the quality of the GPS and IMU data, and post-processing procedures. Accuracies of ±15cm (horizontally) and ±15cm (vertically) can be achieved. Accuracies better than 7cm (vertically) were achieved.
Key words: Detection, image, laser, LIDAR, model, pulsation, system and urban.
LIDAR es un sensor activo y una de las técnicas de adquisición de datos más novedosas y exitosas [1], emite y recibe luz en las longitudes de onda visible e infrarroja.
El láser es un dispositivo para producir luz por emisión de energía almacenada, en un sistema molecular o atómico, cuando es estimulado por una señal de entrada [2].
El LIDAR utiliza rayos láser para generar pulsos de luz cortos y de alto poder, en la medida que el pulso pasa a través de la atmósfera, la luz difusa que regresa se detecta por un sistema óptico y se analiza electrónicamente para proporcionar una medición de la intensidad de la luz reflejada por constituyentes del objetivo en función de la distancia desde el sensor [16].
Este documento está organizado de la siguiente manera: en la sección dos se exponen los fundamentos de LIDAR, en la siguiente sección se presenta la geometría de esta tecnología. Luego en la sección cuatro se reseñan diversas aplicaciones de esta tecnología en el procesamiento de la infor mación geográfica, enfatizando sus bondades y características avanzadas claves en diversos ámbitos de la ingeniería, en la siguiente sección se presenta el tratamiento de las imágenes 3D. Luego se aborda un enfoque comparativo de distintas alternativas tecnológicas utilizadas en su implementación y finalmente se presentan algunas conclusiones y desarrollos futuros.
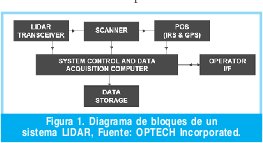
Esencialmente un sistema LIDAR está conformado por un sistema transmisor, uno receptor, uno de control y uno de procesamiento, en la Figura 1 se muestra un diagrama de bloques de un sistema LIDAR típico.
Las longitudes de onda de los láser usadas en LIDAR dependen de la aplicación y se extienden desde alrededor de 250 nm a 11 µm, los láser de rubí, nitrógeno, vapor de cobre y CO2 fueron principalmente usados durante los primeros años, el láser excimer de alto poder y los láser Nd:YAG han sido utilizados en estos campos desde los años ochenta. Los láser excimer producen radiación ultravioleta, los láser de cristal de Nd:YAG emiten una longitud de onda de 1064 nm en la región espectral infrarroja. La frecuencia se duplica o triplica con cristales no lineales que son ampliamente usados para convertir la radiación primaria de los cristales de Nd:YAG a 532 y 355 nm.
En la forma más simple, la señal LIDAR detectada puede ser escrita así:

En donde la potencia P recibida de una distancia R está dependiendo de cuatro factores, a saber: el primer factor, K, es la suma del desempeño del sistema LIDAR, el segundo G(R), describe el rango que es dependiente de la geometría. El término (R) es el coeficiente de dispersión a una distancia R, este término se tiene en cuenta por la propiedad de la atmósfera de dispersar la luz trasera en la dirección de la cual viene el rayo reflejado y T(R) es el término de descripción de la transmisión del rayo láser y describe cuanta luz desde el LIDAR a la distancia R y de vuelta al receptor se tiene. Ambos (R) y T(R) son sujetos de investigación y en principio determinados y manipulados por el experimentador.
Para ir a más detalle se puede escribir el factor del sistema como:

Donde P0 es la potencia promedio de un pulso láser sencillo y es la longitud del pulso temporal. Por lo tanto E0 = P0 es la energía del pulso, y c es la longitud del volumen iluminado por un pulso láser a un tiempo corregido. El factor ½ aparece debido a que el pulso láser se transmite y regresa y en este proceso solo se toma la mitad de este tiempo durante el cual ocurre el proceso de dispersión.
El factor geométrico,

incluye la función de solapamiento del rayo láser del campo receptor de vista O(R) descrito antes en el término R-2. Si imaginamos un dispersor isotrópico a una distancia R el área del telescopio A recolectará la fracción:

de la intensidad promedio Is dispersada en un ángulo sólido de 4, en otras palabras, el ángulo sólido A/R2 es el ángulo de percepción del LIDAR para una luz dispersa a una distancia R.
El coeficiente de dispersión es el valor específico del coeficiente de dispersión por el ángulo de dispersión = 180o. Aceptando que Nj es la concentración de partículas de dispersión de una clase j en el volumen iluminado por el pulso láser, y que dj,sca (,)/d sean las partículas diferenciales de la sección de dispersión para la dirección hacia atrás en la longitud de onda . El coeficiente de dispersión puede ser escrito cómo:

donde se han sumando todas las clases de dispersiones, la concentración está dada en unidades de m-3 y la sección a través de la dispersión diferencial en m2sr-1, el coeficiente de dispersión tiene unidades en m-1sr-1.
La intensidad relativa de la luz dispersa es:

Con la ecuación 1.4., obtenemos la variación de la intensidad de luz entre el rayo emitido y el de recepción, entonces:

El término de la derecha de esta ecuación describe esa parte de la ecuación de LIDAR que se refiere directamente a la geometría de dispersión, como el tamaño y las propiedades de dispersión del volumen de dispersión y el ángulo de percepción del LIDAR.
En la parte final de la ecuación LIDAR tenemos que considerar la fracción de luz que se pierde en el camino desde el LIDAR hasta el volumen y de regreso por dispersión. El término de transmisión T(R) puede tomar valores entre 0 y 1 y está dado por:

Resumiendo, de la discusión de los términos individuales podemos ahora escribir la ecuación de LIDAR (1.1) en una forma más común así,

Esta ecuación será usada en una u otra variación, en los siguientes temas, como el punto de partida en la descripción de las técnicas LIDAR individuales. Se puede mencionar que la señal detectada siempre se puede tomar como la contribución de fondo Pbg sumada a la señal LIDAR descrita antes.
La medición de distancia con láser LIDAR está revolucionando la adquisición de datos digitales de elevación para las aplicaciones de mapas a gran escala. Con la tecnología LIDAR se tiene a un costo efectivo relativamente bajo comparado con otras tecnologías y una fuente alternativa para los datos de Modelo Digital de Terreno DTM [3]. Se ha adoptado esta tecnología de adquisición teniendo éxito en el uso de datos LIDAR como ingreso de estos para los procesos de contorno y generación de curvas de nivel para ortofotos digitales.
Los arreglos geométricos de las ópticas del emisor y el receptor determinan el grado de la compresión de la señal, en distancias cercanas al LIDAR. A pequeñas distancias del rayo láser no pueden ser completamente mostradas en el detector, además solo una parte de la señal de retorno de la actualidad es medida, esta parte varía con la distancia y depende del diámetro de los rayos láser. La forma y la divergencia, las propiedades de imagen del telescopio (el foco, la longitud al radio-diámetro), el campo de receptor de vista y la localización de los ejes ópticos del emisor y el receptor relativo para cada uno. En sistemas coaxiales el rayo láser es emitido a lo largo de los ejes ópticos del telescopio receptor. En sistema biaxiales los ejes ópticos son separados espacialmente por al menos un radio del espejo del telescopio, y el rayo láser entra al campo de vista del telescopio desde un lado. La función resultante de la combinación de todos los efectos geométricos es llamada función de solapamiento de rayo láser del campo receptor de vista, su valor es cero en el LIDAR y se vuelve unidad cuando el rayo láser está completamente dibujado a través de la detección del campo. Para grandes telescopios la función de solapamiento puede afectar la señal de retorno del LIDAR, sobre todo a distancias grandes de por ejemplo kilómetros.
La configuración básica de un sistema LIDAR consiste en un transmisor y un receptor. Un láser genera pequeños pulsos de luz cuya longitud puede variar entre unos pocos nanosegundos hasta centenares de nanosegundos adicionalmente se tiene en cuenta las propiedades espectrales específicas del rayo láser. Muchos sistemas aplican un rayo expansor dentro de las unidades de transmisión para reducir la divergencia del rayo de luz antes que sea enviado hacia el objetivo. En el lado del receptor, un sistema que consiste en básicamente un telescopio, recibe las señales de luz que se reflejan y han sido dispersadas según la superficie del terreno. Regularmente existe un sistema óptico de análisis, el cual, dependiendo de la aplicación selecciona longitudes de onda específica o estado de polarización de la luz recolectada. La radiación seleccionada es dirigida a un detector donde la señal óptica recibida es convertida a una señal eléctrica, la intensidad de esta señal y su dependencia con el tiempo transcurrido entre la transmisión y la recepción del pulso láser determina las características de los datos recolectados electrónicamente los cuales son almacenados en una computadora, en la Figura 2 se muestra un Sistema LIDAR Aerotransportado (Airborne Laser Scanner, ALS) típico de recolección de datos LIDAR.

El sistema LIDAR es transportado por un avión o por un helicóptero que realiza vuelos sobre un terreno o superficie para recolectar datos de altura en forma de luz. Para compensar las inestabilidades mecánicas del sistema de transporte y garantizar un alineamiento constante, fibras de vidrio ópticas pueden ser montadas en frente de un espejo. Un sistema de posicionamiento es requerido para transformar rangos de medida en coordenadas de terreno tridimensionales, y esto compromete dos partes muy importantes: un sistema GPS y la una Unidad de Medida Inercial (IMU). El objetivo del GPS es medir la posición del sensor láser y georeferenciar los datos de altura y posición obtenidos por el sistema LIDAR. La frecuencia de muestreo es del orden de unos pocos Hertz. La unidad IMU, también llamada Sistema de Orientación Inercial, IGS, usa una combinación de acelerómetros y giroscopios para detectar la tasa de cambio de la aceleración y la altitud. En función de la velocidad de la luz y el tiempo que se tarda un pulso en ser transmitido y recibido nuevamente en el sistema LIDAR se puede hallar información bien precisa de los datos de elevación de un terreno [4]. Los intervalos de tiempo son convertidos en distancia con base en la información de posición obtenida de los receptores GPS dispuestos en el avión y de la IMU, la cual constantemente registra la altitud de la aeronave, en la Figura 3 se muestra un esquema de operación de los subsistemas IMU y GPS.

Toda la fotografía aérea obedece los estándares de la industria para las condiciones de clima, procesamiento, calibración de la cámara, traslape lateral, traslape longitudinal, cabeceo, balanceo, deriva, cobertura de nubes y ángulo de sol. Los sistemas LIDAR colectan datos de las posiciones sobre el plano (x,y) y de elevación (z) en intervalos pre definidos, los datos resultantes LIDAR son una red de puntos muy densa. Los sistemas más sofisticados proporcionan datos de primero y segundo retorno los cuales generan datos de alturas de terreno y vegetación [5].
Las alturas de la vegetación pueden proporcionar las bases para el análisis de aplicaciones de diferentes tipos de vegetación ó de separación según la altura y el número de .retornos que tome el sistema.
Una ventaja significativa de LIDAR es que los datos pueden ser adquiridos en tiempos en que la fotografía aérea convencional no puede hacerlo además las misiones LIDAR pueden ser voladas durante la noche y en condiciones climáticas adversas como días nublados ó de bruma [4]. Hoy en día el LIDAR es reconocido como una tecnología avanzada con muchas características beneficiosas, tal como altas tasas de captura de datos (hasta 100 Km2/h) y niveles de automatización que permiten de manera muy precisa la reconstrucción tridimensional del mundo real. LIDAR también requiere una relativa pequeña inversión lo que implica un bajo costo por punto, además de una alta fidelidad y precisión y un muy buen nivel de detalle (hasta millares de puntos por kilómetro cuadrado), las imágenes si así las podemos denominar proporcionan una solución final que es ampliamente independiente del tipo de terreno, las características y las condiciones del tiempo (condiciones atmosféricas) y hasta la luz del día.
Los productos estándar fotogramétricos derivados de los datos LIDAR incluyen modelos de contorno y elevación para ortofotos. Posterior a la recolección de datos en la misión aérea se debe realizar un procesamiento de los datos crudos para la generación de contornos precisos y para realizar el tratamiento de los datos de elevación y obtener así imágenes del sistema LIDAR tal como se muestra en la Figura 4, como un ejemplo de imagen LIDAR procesada. Puesto que los datos LIDAR son colectados sobre diferentes alturas de objetos elevados como por ejemplo edificios, es necesario en este orden de ideas de software especializado que entre otros contienen sofisticados algoritmos para el tratamiento digital de los puntos colectados. Debido a la densidad de puntos se requieren muy pocas líneas de quiebre, para representar con precisión el terreno [6]. No obstante la presencia del sistema LIDAR y el uso de software de post procesamiento, deberán ser incorporados en el proceso procedimientos de validación para asegurarse de que los contornos finales sean representativos del terreno. El usuario final puede observar y reconocer que los contornos derivados de LIDAR tendrán una apariencia diferente a aquellos que se recolectan mediante técnicas fotogramétricas convencionales. Debido a la densidad de puntos, los contornos derivados de LIDAR, aunque altamente precisos, tenderán a tener una apariencia más quebrada.

La precisión de los datos LIDAR es una función de varias variables como la altura de vuelo, las propiedades físicas y geométricas del rayo láser, la calidad de los datos GPS e IMU y los procedimientos de post procesamiento y hasta del software utilizado. Asumiendo los anteriores parámetros óptimos, se pueden obtener precisiones de un metro (horizontalmente) y 15cm (verticalmente). Sin embargo, para cualquier aplicación de mapeo a gran escala, la exactitud de los datos deberá ser validada, sobreponiendo los puntos en 3D sobre imágenes digitales en una estación fotogramétrica digital se logrará este objetivo [7].
Los valores de altura pueden obtenerse de manera relativamente fácil en áreas de bajas variaciones de texturas, como las playas y las dunas. En la parte infrarroja del espectro se tienen longitudes de onda con valores típicos de 900nm, 1,060 nm y 1,500 nm, las cuales no son penetrativas, así que los pulsos se reflejaran desde la parte alta del follaje de los bosques u otro tipo de vegetación y follaje, en la recolección de los datos la última parte de la señal retornada puede representar la distancia al suelo y la primera parte la altura de la topografía incluyendo la elevación del follaje, por ejemplo. De otro lado algunos sistemas, además de la primera y/o la última parte de la señal retornada, recolecta cuatro u ocho muestras, e incluso todo el pulso retornado, permitiendo la determinación de la estructura de la superficie vertical como la rugosidad, la altura y la forma de los objetos, la densidad del terreno, la altura de los árboles y la reflectividad [8].
El resultado de un levantamiento de datos LIDAR es una nube densa de puntos tridimensionales irregulares y distribuidos que se caracterizan por tener coordenadas XYZ asociadas a atributos tales como las intensidades de las señales retornadas. Los principales problemas cuando se trabaja con los datos LIDAR conciernen al almacenamiento y administración de los datos, la generación de una salida apropiada para el uso de SIG y software CAD, el filtrado de los datos para la reconstrucción de la superficie de la tierra y características como las de los edificios y los árboles, y la visualización de los datos según sea el caso [10].
La representación de la elevación de los datos dentro de un entorno SIG o CAD es llevada preferiblemente en formato raster, los valores de elevación son almacenados en las celdas de un raster regular bidimensional. La transformación de un punto irregular de una nube dentro de un raster regular requiere interpolación, los cálculos computacionales de los valores de elevación para puntos de terreno no muestreado a partir de puntos muestreados que permitan la reconstrucción de la superficie continua requiere la definición de una función que pase a través de los puntos muestreados, para lo que un infinito número de funciones puede dar solución de manera tal que se cumpla con la solución de llenado, desafortunadamente, no hay una regla simple para determinar cuál es el método más apropiado en un caso determinado para un grupo de datos dado [11]. Condiciones adicionales han tenido que ser definidas, lo cual ha resultado en un desarrollo de una riqueza de las técnicas de interpolación que se han de utilizar. Algunas condiciones están basadas en conceptos geoestáticos y otros en localidad, esto último asume una relación entre la elevación de cada punto y otros puntos en la vecindad hasta una cierta distancia, uno de los métodos más simples disponibles es "la interpolación inversa distancia-peso", este asume una relación inversa entre la elevación de los puntos vecinos y su distancia esto es: a una distancia más grande, menor la elevación de un punto muestreado que contribuye al cálculo computacional de la elevación de los puntos no muestreados. Hay también condiciones basadas en la suavidad y la tensión denominados splines o formas funcionales adecuadas. La selección del método de interpolación tiene como base fundamental el conocimiento específico y la experiencia, además de la disponibilidad de algoritmos en el sistema SIG [12]. Es de anotar que debe tenerse en cuenta que los resultados producidos por los diferentes métodos pueden diferir considerablemente y una apropiada selección es crucial; informaciones equivocadas pueden llevar a decisiones erradas y resultados de simulaciones defectuoso.
Un tema de gran importancia para los investigadores es el desarrollo y cálculo de un rango de nuevas técnicas que se integren en la creación de modelos de ciudades, que además permitan cuantificar y evaluar las diferencias entre competitividad y técnica como un esfuerzo para poder comprender mejor los errores y las inconsistencias entre los diferentes modelos [14]. Existen muchas fuentes de datos y estas se han ido incrementando a más bajo costo, ofreciendo un mejor entendimiento de las limitaciones y por tanto se obtiene una mejor aplicabilidad de estos datos. El uso de sensores remotos aerotransportados urbanos dentro de modelos multidimensionales se ha constituido en un área de investigación de mucha importancia, para los diferentes tipos de investigadores. Investigadores de una amplia variedad de disciplinas que incluyen computación, geometría computacional, GIS y percepción remota, se encuentran inmersos en esta área [15].
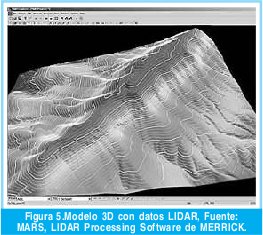
En algunas investigaciones el LIDAR aerotransportado ha sido utilizado para crear modelos 3D de ciudades, la técnica es mucho más sencilla que en las otras utilizadas dado que se tienen datos de elevación de las superficies que se derivan de las diferentes imágenes, allí la elevación es un dato inherente a la imagen, en conclusión los datos son puntos de elevación, lo cual permite de manera sencilla elaborar los modelos tridimensionales. Las actuales investigaciones se enfocan en el error y la incertidumbre en el modelo y la auto correlación de los errores, lo que se espera es que los modelos elaborados con esta tecnología sean en el futuro más exactos.
El proceso de modelamiento de ciudades comprende dos pasos fundamentalmente, en primer lugar la detección de las texturas de la superficie por las alturas terreno y en segundo lugar la identificación o diferenciación de las texturas en diferentes clases de objetos tales como edificios, vegetación y composición de las calles [14].
El valor de los datos LIDAR, cobran una gran ventaja cuando están combinados con otros datos como los de las fotografías aéreas, las imágenes satelitales o los datos topográficos. LIDAR provee información útil para todas las etapas de trabajos de infraestructura, tales como la planeación de un corredor vial, simulaciones de impactos ambientales, movimientos óptimos de trabajos con tierra, determinación de la deformación de una vía y la detección de obstrucciones como la caída de los árboles después de una tormenta [9]. LIDAR también provee información de la creación de modelos de ciudades digitales tridimensionales y un buen monitoreo de las líneas de electricidad. Otras aplicaciones incluyen localización de potenciales inundaciones, modelamiento de flujo de ríos y tasación de los daños después de un desastre. La precisión y resolución del LIDAR son tan altas que los geo científicos están adaptando esta tecnología para ajustar sus modelos de erosión y reforestación entre otras muchas aplicaciones.
La visualización de los datos LIDAR está en SIG-3D para un interfaz que permite el tratamiento de imágenes tridimensionales y operaciones de geo-procesamiento. Software como el SIG Erdas de imágenes virtuales y el ARCGis de ESRI ya han incorporado visualizaciones de 2,5D. La tecnología de lenguaje de modelado de realidad virtual (VRML)/X3D ha puesto la tercera dimensión [13].
Como se dijo antes los modelos de elevación de tierra plana son usados en la creación de modelos 3D de percepción remota de imágenes [39]. En este momento el modelo de tierra plana se obtiene del modelo digital de superficie (DSM) el cual se obtiene de los datos de LIDAR, esta operación produce un modelo digital de superficie normalizado (nDSM), que contiene las elevaciones de objetos sobre la superficie de la tierra, este proceso lo que hace es retornar alturas relativas de los objetos.
Desde luego se presentan errores significantes con respecto al modelo de tierra plana, el siguiente modelo nDSM podría representar las alturas incorrectas de los objetos, lo que podría representar algunas complicaciones a la hora de realizar análisis para la elaboración de modelos 3D, por lo que aquí existe otro punto de investigación, dirigido hacia la cuantificación de la exactitud de este modelo [14].
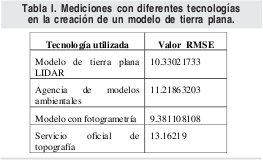
En un ejercicio realizado por el grupo CASA en el Reino Unido en que se realizaron ciertas mediciones con diferentes tecnologías para la realización de un modelo de tierra plana que fue validado con GPS para más de cien lecturas dentro del proceso de validación. El modelo creado tuvo el más pequeño error cuadrático medio (RMSE), lo que sugiere que el modelo obtenido de LIDAR reduce el error de los subsecuentes modelos de ciudades en 3D, como se muestra en la Tabla I.
La segmentación o diferenciación de la imagen como es comúnmente denominada, involucra la clasificación de los modelos de superficie en clases de objetos basados en un número de posibles criterios, dentro de los cuales se pueden considerar criterios espaciales, geométricos, o diferenciación espectral (dependiendo de sobre qué tipo de imagen se esté usando).
En este trabajo se muestra lo ventajoso de utilizar datos LIDAR para la creación de modelos de ciudades y el uso de las propiedades geométricas y espaciales de la imagen como una base para la segmentación, muchas propiedades geométricas usadas para la segmentación de imágenes tal como gradientes de pixeles, la forma de la imagen de los objetos, la compresión de los objetos, la diferencia entre las alturas de los objetos y sus vecinos. Todo lo anterior dentro de la segmentación se obtiene usando técnicas orientadas a objetos, de esta for ma el reconocimiento de objetos es usado dentro de un contexto y la proximidad con los objetos vecinos para obtener la mejor clasificación.
Uno de los parámetros más utilizados en la segmentación es la del gradiente, una imagen gradiente como se muestra en la Figura 5, puede ser utilizada para detectar las diferencias entre edificaciones y vegetación por ejemplo. El valor de gradiente para cada pixel puede ser utilizado para diferenciar entre diferentes clases de vegetación y edificaciones, también la imagen gradiente parece ser muy efectiva para detectar objetos pequeños como autos y botes, lo que es importante para la creación de modelos a partir de datos LIDAR.
En futuros trabajos se deben desarrollar reglas para la extracción de morfologías a partir de los datos LIDAR tendiente a incrementar los detalles y el uso del modelo final de ciudad. Las morfologías de los terrenos son de gran importancia para otras aplicaciones, por ejemplo telecomunicaciones.
Otras especificaciones tal como el material de la superficie por ejemplo, información que se puede obtener de los datos obtenidos a partir de sistemas de percepción remota tiene grandes implicaciones que hasta podrían conducir a la obtención de ambientes 3D GIS lo cual puede abrir gran cantidad de futuras aplicaciones en GIS.
Existen trabajos promisorios en que se usan técnicas de muestreo aleatorio para la extracción de las rutas morfológicas a partir de datos LIDAR, también la determinación de los componentes y materiales de las edificaciones, vegetales, etc. Que permitan por ejemplo la recuperación arquitectónica de edificaciones.
Visualización 3D y realidad virtual, son dos aplicaciones que tienen gracias a la precisión de los datos LIDAR gran futuro de aplicación y campo de investigación en lo que se refiere a métodos para lograr este propósito. Adicionalmente se proyectan otras aplicaciones en seguridad industrial y en prevención y atención de desastres
LIDAR es una tecnología que puede aportar grandes beneficios a los profesionales que trabajan en áreas de geografía, cartografía, ingeniería, estudios atmosféricos, arquitectura, etc.
LIDAR es una herramienta que permite obtener imágenes de muy buena calidad a costos relativamente bajos.
Existen diversas aplicaciones de software que permiten el análisis y desarrollo de aplicaciones de imágenes LIDAR.
Para algunas aplicaciones como por ejemplo el diseño de redes de telecomunicaciones se requiere de la inclusión de los traslapes de las redes de transporte, de manera tal que en el caso de las alturas permitidas en algunos tramos de las líneas del tren por ejemplo serán bien consideradas. En todo caso se debe considerar que solo las partes de las alturas que se obtienen en los modelos son las alturas máximas por decirlo de alguna forma.
La metodología del modelo de tierra plana es relativamente más simple que el modelo estructural de superficie, en este paso se trata esencialmente la superficie de la tierra o del terreno como una cantidad binaria. En otras palabras los objetos son o no una parte de la superficie de tierra plana, lo cual es simple y atractivo, pero hay algunos problemas fundamentales asociados con esto. Estos resultados sugieren que esencialmente se tiene algún grado de incertidumbre en todas las clasificaciones del mundo real, existe un documento de Zhang y Goodchild (2002), que trata de la incertidumbre en una muy amplia discusión [14].
[1] H. Kager, K. Kraus, Height Discrepancies between Overlapping Láser Scanner Strips. In Grün/Kahmen (Eds.): Optical 3-D Measurement Techniques V, 2001, pp. 103 - 110.
[2] P. Friess, Toward a Rigorous Methodology for Airborne Láser Mapping, EuroCOWS Barcelona, 2006.
[3] H. Kager, Discrepancies Between Overlapping Láser Scanning Strips- Simultaneous Fitting of Aerial Láser Scanner Strips; ISPRS XXth Congress, Istanbul; Vol. XXXV, Part B/1, 2004, pp555 - 560.
[4] R. Ostnes, V. Abbott, y S. Lavanda, Técnicas de la visualización: Una descripción parte 1 y 2. El diario hidrográfico, 2004.
[5] H. Kager, ORIENT, A Universal Photogrammetric Adjustment System, Reference Manual Vol. 1.7, Institute of Photogrammetry and Remote Sensing, TU Vienna. 1995.
[6] CeGi, regiones virtuales a lo largo del Rin y el Ruhr 2006 (en título alemán, original: El `Virtuelle de Machbarkeitsstudie regionen un und Ruhr 2006 de Rhein'). Centro para Geoinformation GmbH: Estudio de viabilidad a nombre del gobierno del estado de Rin-Westfalia de norte. Dortmund. 2006,
[8] I. Fujisaki, D. L. Evans, R. J. Moorhead, D. W. Irby, M. J. M. Aragh, y S. D. Roberts, Visualización LIDAR-basada del bosque: Modelar soportes de bosque y estudios de usuario. En: Conferencia anual de ASPRS, Fairbanks, Alaska, 2003.
[9] K. Kraus, with contributions by J. Jansa und H. Kager; Photogrammetry - Advanced Methods and Applications. Volumen 2, Dümmler Verlag, Bonn, (English edition, translated by P. Stewardson), 1997, pp. 235 - 477.
[10] SCOP++. Interpolation, management, application and visualization of digital terrain data. Product information: http://www.ipf.tuwien.ac.at/products/produktinfo/scop/ scop_dtm_sheet.htm (consultado 15. Mar. 2004)
[11] W. E. Baker, LIDAR-measured winds from space: A key component for weather and climate prediction,Bull. Amer. Meteor. Soc. 1995, pp. 76, 535-888.
[12] F. Amzajerdian, Analysis of Optimum Heterodyne Receivers for Coherent LIDAR Applications, Int. Láser Radar Conf., 2002.
[13] S. Ahlberg, U. Soderman, M. Elmqvist, and A. Persson. On modeling and visualization of high resolution virtua environments using LIDAR data. In Proceedings of the 12th Int. Conf. on Geoinformatics, pp. 299306, 2004.
[14] J. Zhang,. y M. F. Goodchild, Uncertainty in Geographica Information. Taylor y Francism USA, 2002.
[15] Mesev y Longley Measuring the urban: measuring and modeling in a regional settlement hierarchy. In Tate N J, Atkinson P M. Modelling scale in geographical information science . Chichester, Wiley, 2001, pp. 53-67.
[16] Gonzáles Héctor, Angulo Chavarro, Jaime. Teoría, diseño básico y señales recibidas por un sistema LIDAR para mediciones atmosféricas. Revista Ingeniería Universidad Distrital Francisco José de Caldas, Vol. 10, 2005.
[17] F. Amzajerdian, et al, "Construction and Space-qualification of a LIDAR Telescope," Int. Laser Radar Conference, July 2000.
[18] F. Amzajerdian, "Analysis of Optimum Heterodyne Receivers for Coherent LIDAR Applications," Int. Laser Radar Conf., 2002.
[19] S. Ahlberg, U. Soderman, M. Elmqvist, and A. Persson. On modeling and visualization of high resolution virtua environments using LIDAR data. In Proceedings of the 12th Int. Conf. on Geoinformatics, pp. 299306, 2004.
[20] A. Alharthy and J. Bethel. Heuristic .ltering and 3D fea
ture extraction from LIDAR data. In PCV02, p. A:29, 2002.[21] C. Baillard, C. Schmid, A. Zisserman, and A. Fitzgibbon. Automatic line matching and 3D reconstruction of buildings from multiple views. In ISPRSGIS99, pp. 6980, 1999.
[22] E. S. de Medeiros Filho, L. Velhoa, and H. Lopes. Restricted BPA: Applying ball-pivoting on the plane. In XVII Brazilian Symposium on Computer Graphics and Image Processing, pp 372379, 2003.
[23] P. E. Debevec, C. J. Taylor, and J. Malik. Modeling and rendering architecture from photographs: A hybrid geometryand image-based approach. In SIGGRAPH, pp. 1120, 1996.
[24] A. Elaksher and J. Bethel. Reconstructing 3D buildings from LIDAR data. In PCV02, p. A: 102, 2002.
[25] C. Fr¨uh and A. Zakhor. Constructing 3D city models by merging ground-based and airborne views. In CVPR 2003, pp. 562569, 2003.
[26] N. Haala and C. Brenner. Extraction of buildings and trees in urban environments. PandRS, pp. 130137, July 1999.
[27] J. Hu, S. You, and U. Neumann. Approaches to largescale urban modeling. IEEE CG&A, pp. 6269, 2003.
[28] S. C. Lee and R. Nevatia. Interactive 3D building modeling using a hierarchical representation. In HLK, pp 5865, 2003.
[29] G. Vosselman. Building reconstruction using planar faces in very high density height data. In International Archives of Photogrammetry and Remote Sensing, pp. 8792., 1999.
[30] S. You, J. Hu, U. Neumann, and P. Fox. Urban site modeling from LIDAR. In ICCSA (3), pp. 579588, 2003.
[31] R. Targ. M.J. Kavaya, r.M.tluffaker, R.L. Bowles, App. Opte 30,2012 (1991).
[32] S.M. Llamon y J.A. Thomson, J., Mod. Opte 41,2175 (1994).
[33] C. Werner, V., Banakh, P., Kopp, yo. Smalikho, en el Radar del Láser Coherente el Compendio Técnico, 1995, el Compendio Técnico Series 19,5 (1995).
[34] K. Asaka, T., Yanagisawa, Y., Hirapo, en Láser Internacional que se Da cuenta de Simposio 99, los lo abstracto de Papeles 277 (1999).
[35] Y. Shoji, M., Inaki, T., Yanagisawa, Y., Itirano. O. Uchino, T., Nagai, C., Nagasawa, en Tecnical Digest de OLEO 99, el papel CFJ5 (1999).
[36] T. Yanagisawa, M., Imaki, E Ilirano, O., Uchino, T., Nagai, c. Nagasawa, en Láser de Internacional que se Da cuenta de simposio 99, Ab el stacts de Papeles, 191 (1999).
[37] L. Zhen, L. Shukai, "A new airborne remote sensing system integrating scanning altimeter with infrared scanner," Proc. of IGARSS'97, Vol. I, pp. 427-429, Singapore, Aug. 1997.
[38] E.J. Huising, L.M. Gomes Pereira, "Errors and. accu- racy estimates of laser data acquired by various laser scanning systems for topographic applications," ISPRS J. Photogramm. Remote Sensing, Vol. 53, No5, pp. 245- 216, July 1998.
[39] J . Bryan Mercer and Michael Gill, "Radar-Derived DEMs for Urban Areas", Proc. of the ISPRS Com- mission 11 Symposium, Cambridge, UK, Vol 32, pp. 210-216, July 1998.
[40] P. Gamba, B. Houshmand, M. Saccani: "Detection and extraction of buildings from interferometric SAR data," IEEE Trans. on Ge,oscience and Remote Sens- ing, Vol. 38, n. 1, pp. 611-618, Jan. 2000.
[41] P. Gamba, B. Houshmand: ": "Digital surface mod- els and building extraction: a comparison of IFSAR and LIDAR data," IEEE Trans. on Geoscience and Remote Sensing, Vol. 38, 11. 3, May 2000.
[42] S. Lakshmanan, "LEXLUTHER: Un algoritmo para los caminos detectores y obstáculos en las imágenes del radar, IEEE. 1998.
[43] A. Kirchner, "el eines de Sensordatenverarbeitung Laserscanners el autoname de piel el von de Fahrfunktionen Krafifahrzeugen", Disertación el der de Univenitar Bundeswehr Hamburgo, 2000.
[44] Fardi. "Multi el Descubrimiento Modal y el Seguimiento Parámetro-basado DE Fronteras del Camino con un Escáner de Laser", IEEE, 2003,
[45] Nielsen, E. Tecnologías estereoscópicas de la visión: Tecnologías de Seereal. GIM internacional, mayo, vol. 20, nr. 5. 2006.
[46] BOSCH, "`Fahrgeschwindigkeitsregelung ACC Adaptable", el Gelbe Reihe Kraftfahrzeugtechnik, Ausgabe 2002.
[47] A. el von Reyher, M., Raab y H. El ganador," el Descubrimiento de Ambiente Avanzado basó en LIDAR", VDINW-Tagung el und de Fahrerassistenz Aktive Sicherheit, 2004.
[48] B. Adiprasito, "el im de Fahrzeugliingsfuhrung Niedergeschwindigkeitsbereich", La disertación TU Bnunschweig, 2004.
[49] Zhang, J. y Goodchild, M. F. (2002) Uncertainty in Geographical Information. Taylor y Francism USA 2002.
[50] Mesev y Longley, Measuring the "urban": measuring and modeling in a regional settlement hierarchy. In Tate N J, Atkinson P M (eds) Modelling scale in geographical information science . Chichester, Wiley, 53-67. 2001
[51] Kager, H., Kraus, K. Height Discrepancies between Overlapping Laser Scanner Strips. In Grün/Kahmen (Eds.): Optical 3-D Measurement Techniques V, pp. 103 -110. 2001.
[52] Katzenbeisser, R., 2003, About the calibration of LIDAR sensors, ISPRS Workshop 2003, Dresden.
