DOI:
https://doi.org/10.14483/22484728.4397Publicado:
2013-01-01Número:
Vol. 7 Núm. 1 (2013)Sección:
Visión de CasoDetección de posición a partir de la medición de un campo magnético
Position detection based on magnetic-field measurements
Palabras clave:
Magnetic field density, Hall efect, solenoid, error (en).Palabras clave:
Densidad de campo magnético, efecto Hall, solenoide, error. (es).Descargas
Referencias
R, A. Serway, Electricidad y magnetismo, 7a. ed. México: Editorial Mc Graw- Hill, 1999, Cap. 30.
F. Gilart G., N. Fleitas S. “Caracterización magnética de un par de bobinas de Helmholtz para su utilización como sistema generador de campos magnéticos bajos en metrología”. Santiago de Cuba: Centro Nacional de Electromagnetismo aplicado, Oficina Territorial de Normalización. Santiago de Cuba Consultado en septiembre de 2009. [En línea] disponible en http://wwwmagnetismocnea. wordpress.com
J. I. Atorino, L. P. Bortolín, E. Rodríguez, R.O. Farías, E.E. Rodríguez. “Experimento con sensor Hall”, en Latinamerican journal of physics education, Volume 3, Number 3, september 2009. [En línea] disponible en http://www. journal.lapen.org.mx; [descargado el martes 03 de noviembre de 2009].
http://www.datasheetcatalog.net; Sensores Lineales de efecto Hall; UGN3503.PDF; [descargado el Jueves, 10 de septiembre de 2009].
R. Pallas, Sensores y Acondicionadores de Señal. Barcelona: Marcombo Boixareu
Editores, 1994, Cap. 1 y 3.
A. Lugo J., G. J. Poolbalam. Integración de PIC18f2455 de microchip™ con Lab-
VIEW™ 8.2 de National Instruments™ con mpusbapi.dl. Mérida, Yucatán: Universidad modelo escuela de ingeniería. Maestría en Mecatrónica, junio, 2008. [En línea] disponible en http://es.scribd.com/doc/37448446/Integracion-de- PIC18F2455-con-LabVIEW-8-2-conmpusbapi
Cómo citar
APA
ACM
ACS
ABNT
Chicago
Harvard
IEEE
MLA
Turabian
Vancouver
Descargar cita
VISIÓN DE CASO
Visión Electrónica, 2013-06-03 Volumen:7, Año:1 pág: 133–148
DETECCIÓN DE POSICIÓN A PARTIR DE LA MEDICIÓN DE UN CAMPO MAGNÉTICO
POSITION DETECTION BASED ON MAGNETIC-FIELD MEASUREMENTS
Fecha de envío: marzo de 2011
Fecha de recepción: marzo de 2011
Fecha de aceptación: enero de 2012
Diana P. Gómez
Tecnóloga en Electrónica. Facultad Tecnológica, Universidad Distrital Francisco José de Caldas (Colombia). kirarasan@hotmail.com
Jefry Leal
Tecnólogo en Electricidad. Facultad Tecnológica, Universidad Distrital Francisco José de Caldas (Colombia). lealvi28 @hotmail.com
Henry Montaña
Ingeniero Electrónico. Docente Universidad Distrital Francisco José de Caldas (Colombia). hmontana@gmail.com
Alejandro Sánchez
Ingeniero Eléctrico. Docente Universidad Distrital Francisco José de Caldas (Colombia). asanchezs@udistrital.edu.co
RESUMEN
Se presenta el proceso de diseño, construcción y análisis del comportamiento de un prototipo que emplea la medición de la densidad de un campo magnético, por medio de un sensor de efecto Hall, para determinar la posición de un objeto sometido a una fuente de campo magnético. Se describen todos los aspectos técnicos tenidos en cuenta en el diseño del prototipo, así como los criterios para la selección de componentes, y la determinación de las características de la fuente del campo, de la tarjeta de adquisición, del protocolo de transmisión de datos y del software de control; igualmente, se presentan los cálculos realizados y los contenidos de los programas de transmisión de datos mediante el protocolo USB y del software para la adquisición y tratamiento de los datos en LabVIEW®. Se expone el comportamiento y las características más importantes del prototipo, comparando los distintos resultados, con el fin de cuantificar el error obtenido en la medición y establecer qué aspectos afectan su funcionamiento, y de qué forma.
Palabras claveDensidad de campo magnético, efecto Hall, solenoide, error.
Abstract
This paper presents the design process, construction and performance analysis of a prototype that uses magnetic field density measurements via a Hall-effect sensor to determine the position of an object that is exposed to a magnetic field source.
We describe all the technical aspects that were considered in prototype design, namely the criteria for the selection of components, the characteristics of the field source, the choice of acquisition card, the data transmission protocol and the control software. Calculations are also presented together with the data transmission program content via USB protocol and the software package used for data acquisition and processing (LabVIEW®).
Additionally, the behavior and the most important features of the prototype’s performance are graphically represented and accurately described, comparing the different results to quantify error measurements and to establish the aspects that most affect and drive the operation of the prototype.
Key WordsMagnetic field density, Hall efect, solenoid, error.
Introducción
Actualmente existe interés por explorar alternativas para determinar la posición de un objeto en movimiento a partir de la medición de variables físicas. La alternativa propuesta en este artículo es determinar la posición de un objeto sometido a un campo magnético estático, que se mueve en trayectoria rectilínea a partir de la medición de dicho campo magnético.
Con este propósito, se diseñó e implementó un prototipo para el registro visual de la posición de un objeto, que consiste en un sensor de efecto Hall, dentro de un campo magnético estático no homogéneo. El campo magnético que se utiliza como medio de referencia se creó mediante un solenoide, y la obtención de información se llevó a cabo por medio de una tarjeta de adquisición de datos que envía los datos registrados por el sensor a un programa implementado en el software LabVIEW®1 versión 8.5, esto con el fin de generar una gráfica en la cual se observe la posición del sensor respecto a un punto de referencia del solenoide.
1 LabVIEW®: entorno gráfico de programación creado por National Instruments y disponible en el mercado desde 1986 para el desarrollo de aplicaciones de pruebas y mediciones, control de instrumentación y de sistemas de adquisición de datos.
1. Diseño
El diseño del prototipo se puede representar a partir de la descripción de cada uno de los bloques funcionales que se observan en la figura 1.
Figura 1. Diagrama de bloques del funcionamiento del equipo

Fuente: elaboración propia.
1.1 Generación del campo magnético
La magnitud del campo producido por un solenoide de varias capas y su comportamiento respecto al cambio de posición del punto de medida sobre el eje del solenoide se determina mediante la ecuación (1).
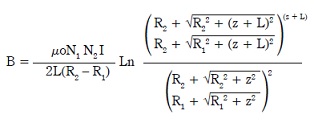 (1)
(1)
Donde  o es la permeabilidad magnética
del vacío, que es de aproximadamente
o es la permeabilidad magnética
del vacío, que es de aproximadamente
 N1 es el numero de
vueltas por capa, N2 es el número de capas,
I es la corriente que circula por el solenoide,
L es la longitud del solenoide R2, es el radio
mayor del solenoide y R1, es el radio menor
del solenoide.
N1 es el numero de
vueltas por capa, N2 es el número de capas,
I es la corriente que circula por el solenoide,
L es la longitud del solenoide R2, es el radio
mayor del solenoide y R1, es el radio menor
del solenoide.
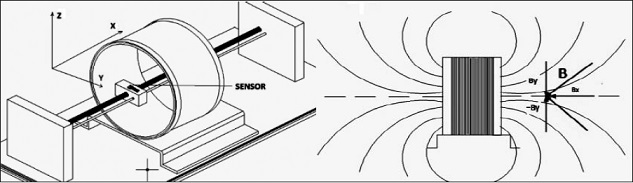
En la figura 2 puede observarse la distribución del sistema de coordenadas y variables empleadas en la ecuación como referencia para calcular el campo en un solenoide de varias capas.
Figura 2. Sistema de coordenadas empleadas como referencia en un solenoide de varias capas
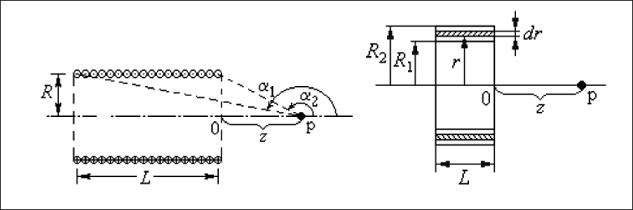
Fuente: F. Gilart González, Centro Nacional de Electromagnetismo aplicado. http://monografi as.uo.edu.cu/
Para la medición de la magnitud del campo
generado se utilizó un sensor lineal de efecto
Hall, de referencia UGN 3503U, que tiene
una salida de tensión proporcional al campo
que lo atraviesa, siempre y cuando se encuentre
en un rango de  Tiene
una sensibilidad aproximada de 13 V/T [1]. En
el manual de especificaciones del sensor se
pueden consultar otras características.
Tiene
una sensibilidad aproximada de 13 V/T [1]. En
el manual de especificaciones del sensor se
pueden consultar otras características.
Para calcular la linealidad y sensibilidad del sensor se realizó un procedimiento que consistió en registrar y graficar la tensión de salida del sensor para distintos valores de corriente, de tal manera que se pudiera observar una relación lineal entre la tensión de salida y el campo magnético aplicado. El campo es generado por un par de bobinas de Helmholtz.
Figura 3. Sensor de efecto Hall instalado en el centro de un par de bobinas de Helmholtz

Fuente: Fuente: elaboración propia.
El campo generado por este arreglo de bobinas de Helmholtz es aproximadamente homogéneo y está dado por la ecuación (2).
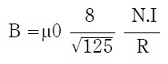 (2)
(2)
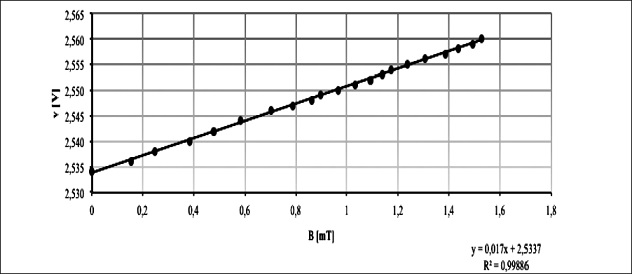
A partir de este hecho se tabula y grafica el comportamiento del sensor como se muestra en la figura 4.
De la gráfica de la figura 4, y por medio del método de mínimos cuadrados, se obtuvo la línea de tendencia que mejor se acomodó a la gráfica. Esta pendiente es la que determina el coeficiente de sensibilidad del sensor, en este caso es:
 (3)
(3)
Figura 4. Voltaje de salida del sensor en función del campo magnético
Fuente: Fuente: elaboración propia.
1.1.1 Solenoide para el prototipo
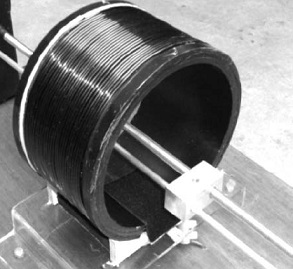
Se diseñó e implementó un solenoide de 6 capas y 30 vueltas por capa, que transporta aproximadamente 11,2 A por su alambre conductor y con unas dimensiones de 0,09 m de largo y 0,080 m de radio promedio (figura 5). Estas dimensiones se establecieron buscando generar un campo magnético con una zona homogénea igual o menor a la resolución propuesta, de cinco milímetros. En la zona central del solenoide se genera el campo magnético máximo que es alrededor de 13 mT.
Figura 5. Solenoide utilizado en el prototipo
Fuente: Fuente: elaboración propia.
Para medir la magnitud del campo de los puntos ubicados sobre el eje geométrico, se fijó el eje x en un sistema de coordenadas rectangulares en el eje geométrico de la bobina. Las coordenadas y y z se definieron como lo muestra la figura 6.
Figura 6. Sistema de coordenadas establecido en el solenoide
Fuente: F. Gilart González, Centro Nacional de Electromagnetismo Aplicado. http://monografi as.uo.edu.cu/
Se llevaron a cabo mediciones de campo orientando el sensor de tal manera que se pudiera medir cada una de las componentes, y se observó que para medir las componentes y y z del campo el valor registrado cambió tan solo 500 mV aproximadamente, resultado que no garantiza la correcta medición del campo debido a que esta tensión representaría alrededor de 1,2 mT de variación en todo el eje, cambio que es mínimo teniendo en cuenta la resolución del sensor.
Después de realizar las mediciones, las cuales determinaron que solo se requiere medir el campo en la coordenada x, se instaló el sensor sobre el eje del solenoide.
1.2 Tarjeta de adquisición de datos (DAQ)
La tarjeta de adquisición de datos está compuesta por varios bloques funcionales como se muestra en la figura 7.
Figura 7. Diagrama de bloques de la tarjeta de adquisición de datos

Fuente: elaboración propia.
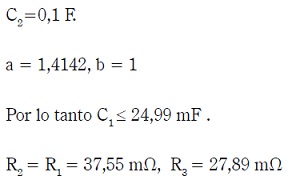
1.2.1 Acondicionamiento de señal
Debido al modo de operación del sensor, para obtener el valor de tensión proporcional al campo que atraviesa el sensor, es necesario restarle al valor de salida del sensor en presencia del campo el valor de la salida del sensor cuando no hay presencia del campo; para esto, se implementó un circuito restador utilizando un amplificador operacional convencional como se muestra en la figura 8.
Figura 8. Circuito restador implementado en un amplificador operacional
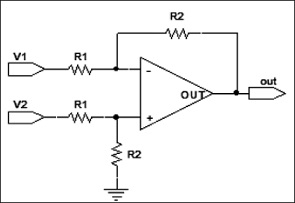
Fuente: http://www.fceia.unr.edu.ar/enica3/fi ltros-t. pdf.
138 El circuito de la figura resta las señales de entrada y el resultado se amplifica con la ganancia (Av). Como lo representa la ecuación (4).
Es decir:
 (4)
(4)
1.2.2 Amplificación
Es necesario darle a la señal un nivel de tensión que permita que los cambios puedan ser registrados por un microcontrolador. Además, si esta señal pretende utilizarse en ambientes “con ruido eléctrico”, por lo general este ruido tiene una mayor amplitud que la respuesta del propio sensor. De modo que debe amplificarse de manera “diferencial” este tipo de señal con el objetivo de reducir los posibles errores al momento de amplificarse. Así, usualmente la señal se amplifica para aumentar la magnitud de algunos milivoltios a otra de voltios, utilizando un amplificador de instrumentación AD620. Su ganancia de voltaje puede variar de 1 a 10 000 con tan solo la manipulación del valor de una resistencia. Su alto rechazo al modo común (Common Mode Rejection Ratio – CMMR) es la característica que le permite al dispositivo diferenciar entre la señal y el ruido.
La ganancia de este amplificador está dada por la ecuación (5) donde la RG de ganancia está ubicada por pines 1 y 8 del integrado:
 (5)
(5)
El valor de ganancia para este caso fue de 34,3 aproximadamente; se estableció este valor para que cuando el sensor de efecto Hall detecte la máxima densidad de campo magnético, la tensión en la salida del amplificador sea aproximadamente de 5V, que es el valor ideal para aprovechar al máximo el conversor análogo-digital del microcontrolador.
1.2.3 Filtrado
Con el fin de atenuar e incluso anular las frecuencias indeseadas (ruido eléctrico) a la salida del amplificador de instrumentación, se escogió un filtro pasa bajos activo de segundo orden con estructura de realimentación múltiple, Multiple-FeedBack (MFB), para garantizar que el filtro tenga una ganancia de uno o cerca a este valor, de manera que la ganancia de la señal del sensor solo sea manipulada por medio del amplificador de instrumentación.
Criterio para seleccionar los valores de los elementos externos del filtro. A continuación se muestra las características principales del filtro pasa bajo (figura 9) con:
Figura 9. Filtro pasa bajo de segundo orden MFB
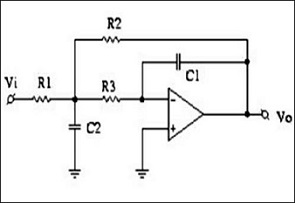
Fuente: http://www.fceia.unr.edu.ar/enica3/ fi ltros-t.pdf¿

La selección de las resistencias y los condensadores se desarrolló a partir de las ecuaciones para filtros pasa bajos Butterworth, que es posible encontrar en el enlace http://www. fceia.unr.edu.ar/enica3/filtros-t.pdf
Los resultados obtenidos fueron:
El factor de escalonamiento empleado fue de 1 000 000 y se usaron los valores de condensadores y resistencias comerciales más cercanos al resultado obtenido. Se rediseñó el filtro utilizando los siguientes elementos:
Además se usó el amplificador operacional IC LF353, que es un integrado de 8 pines.
1.2.4 Sensor de simetría
El campo magnético, a lo largo del eje geométrico, describe una función simétrica en donde su punto máximo se encuentra el centro del solenoide. El equipo debe ubicar la posición en la que se encuentra el sensor sobre el eje de la bobina y es posible que registre un mismo valor de campo para dos puntos diferentes sobre el eje. Teniendo en cuenta lo anterior, se implementó un sensor óptico que se basa en un led emisor de luz y un fototransistor integrados en un solo elemento conocido como CNY70. La tensión de salida del CNY70 es utilizada para accionar un circuito electrónico compuesto por dos transistores, dispuestos de manera que cuando la superficie de reflexión utilizada es de color negro a la salida se registra un “uno lógico” y cuando es blanca se obtiene un “cero lógico”. La salida de tensión del arreglo de transistores se toma como una entrada adicional en la tarjeta de adquisición y el dato de la simetría es enviado al PC para que en el programa este dato sea tomado en cuenta en el momento en que se genera la gráfica.
1.2.5 Conversión análoga-digital
Para la conversión se utiliza el módulo de conversión análoga-digital que viene incluido en el PIC 18f4550, debido a que ofrece la posibilidad de manipular la resolución del conversor con solo variar el número de bits asignados al registro de lectura del conversor; para el proyecto se utilizó un conversor de diez bits que toma como tensión de referencia la de alimentación del microcontrolador (5V). A partir de este valor de tensión, la resolución del conversor se calcula con la ecuación (6):
 (6)
(6)
El valor del registro del conversor muestra un
cambio por cada  que incremente
o disminuya el valor de tensión a la entrada
de canal de conversión. En el módulo de conversión
análoga digital también se dispone un
canal de conversión para recibir los datos provenientes
del sensor de simetría. El microcontrolador
se encarga de leer cada uno de los
canales, por lo cual es necesario almacenar en
variables diferentes el valor que tome el conversor
al leer cada una de las entradas, una
por cada entrada. Estos arreglos se realizan
dentro del programa del microcontrolador.
que incremente
o disminuya el valor de tensión a la entrada
de canal de conversión. En el módulo de conversión
análoga digital también se dispone un
canal de conversión para recibir los datos provenientes
del sensor de simetría. El microcontrolador
se encarga de leer cada uno de los
canales, por lo cual es necesario almacenar en
variables diferentes el valor que tome el conversor
al leer cada una de las entradas, una
por cada entrada. Estos arreglos se realizan
dentro del programa del microcontrolador.
1.3 Protocolo de comunicación USB
El proyecto implementa la comunicación USB mediante un microcontrolador PIC de la familia PIC18FX455/X550, que ya contiene una interfaz para la comunicación USB versión 2.0 full speed.
En cuanto al sistema de adquisición de datos se utiliza la comunicación por volumen de datos (Bulk Transfer), debido a que la transferencia de tipo Bulk alcanza una velocidad de transmisión de 12 Mbps y aunque requiere de controladores (drivers) para su funcionamiento, es útil en dispositivos que envían gran cantidad de datos. Con el fin de facilitar el desarrollo de aplicaciones utilizando el puerto USB, Microchip ha creado un archivo .dll que contiene las funciones de acceso mediante bus USB para la familia PIC18fxx5x. La MPUSBAPI.dll de Microchip se utiliza en la comunicación Bulk Transfer y contiene al menos diez librerías con los diferentes procesos necesarios para comunicarse con el PC. Los contenidos de estas librerías se pueden consultar en la página de Microchip Solutions.
Para lograr el enlace a USB se utilizaron las funciones USB incorporadas en el lenguaje C del programa CCS para PIC. Dichas funciones están preparadas para que el microcontrolador sea reconocido como un dispositivo personalizado. Usando los descriptores que incluye el mismo lenguaje, se establece la cantidad de datos a 64 bytes (8 bits por byte) de envío y recepción hacia la PC.
1.4 Software para el dispositivo
Para implementar un software que permita leer y manipular los datos enviados por el microcontrolador a través el puerto USB se utiliza LabVIEW® versión 8.5, que es un entorno gráfico de programación en el que se pueden crear aplicaciones de forma rápida y sencilla.
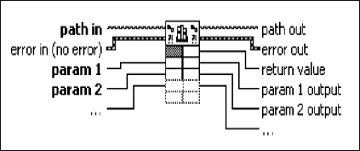
Para establecer la comunicación con el microcontrolador se configura directamente la .dll con la instrucción “Call library function node” que se encuentra en el diagrama de bloques, en el submenú conectividad, librerías y ejecutables. La función aparece como un pequeño bloque como se muestra en la figura 10.
Figura 10. Diagrama bloque y conexión de la función “Call library function node”
Fuente: elaboración propia.
Esta función permite manipular la librería MPUSBAPI.dll, para ello al dar doble clic en la parte amarilla se visualiza un menú de configuración en el cual debe proporcionarse la dirección donde se instaló la .dll de Microchip y de inmediato cargará. Al presionar la flecha de menú en el campo “Function name” pueden observarse las funciones que la .dll admite; solo es necesario anexar las variables y acondicionar el tipo de entrada.
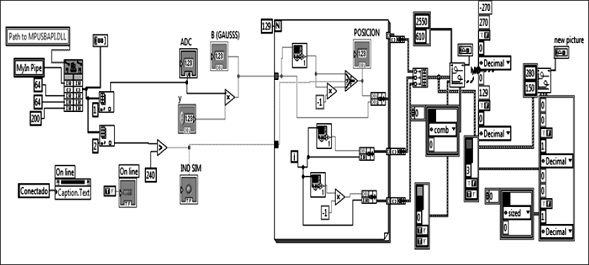
La función para la lectura de los datos aparece en la figura 11, en ella los datos contenidos en el vector enviado por el microcontrolador son extraídos en variables separadas, con el fin de trabajar de manera independiente con los valores de conversión del sensor y de la simetría.
Figura 11. Diagrama general de bloques y conexiones para la lectura de datos
Fuente: elaboración propia.
El valor transmitido por el microcontrolador que representa el valor de tensión entregado por la tarjeta de adquisición es un número de 0 a 255. Para obtener el valor del campo por el sensor se multiplica el valor del conversor análogo digital (ADC, por sus siglas en inglés) por una constante, cuyo valor se determinó con la ecuación (7):
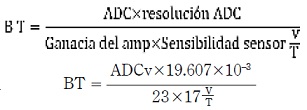 (7)
(7)
En una prueba se tomaron datos de posición y salida del amplificador realizando un barrido sobre el eje del solenoide, este dato de voltaje del amplificador se convierte en un valor en Teslas; estos valores se ingresaron a un instrumento virtual en LabVIEW®, que tiene la función de recibir los datos ingresados y arrojar como resultado el polinomio que más se aproxime a la curva. Una vez obtenida una curva característica de los datos ingresados, el programa puede asignar una posición para el valor de campo ingresado y posteriormente visualizarlo en una gráfica de posición vs campo magnético.
2. Resultados
2.1 Comportamiento del solenoide
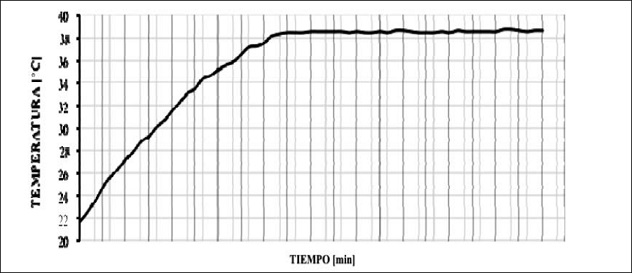
Para el diseño del solenoide fue necesario tener en cuenta los efectos del incremento de temperatura debido a la corriente que circula por el conductor y su potencia asociada en forma de calor. En la gráfica de la figura 12 se observa la variación de temperatura sin ventilación forzada.
En la figura 12 se observa una variación alrededor de 16 °C en un tiempo de 60 min. Este comportamiento influye en que la corriente sea inestable.
Figura 12. Comportamiento de la temperatura del solenoide en función del tiempo sin ventilación forzada
Fuente: elaboración propia.
En la figura 13 se observa el comportamiento de la temperatura cuando se adicionaron dos ventiladores a los lados del solenoide.
Figura 13. Comportamiento de la temperatura del solenoide en función del tiempo con ventilación forzada
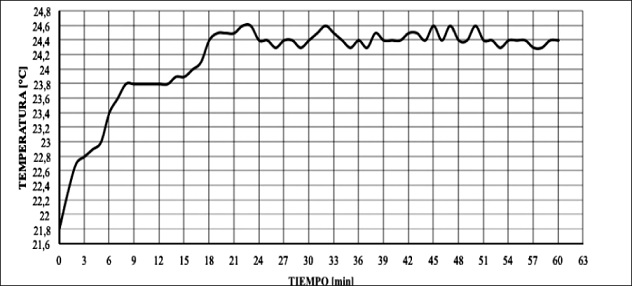
Fuente: elaboración propia.
Se observa que la variación de temperatura se reduce aproximadamente a un 80 stargate atlantis con respecto al caso anterior sin ventilación, lo que mejora la estabilidad en el valor de la corriente (figura 14). Para ambas pruebas la temperatura ambiente se encontraba en un valor entre 20.3 °C y 22.2 °C.Figura 14. Comportamiento de la corriente en función del tiempo
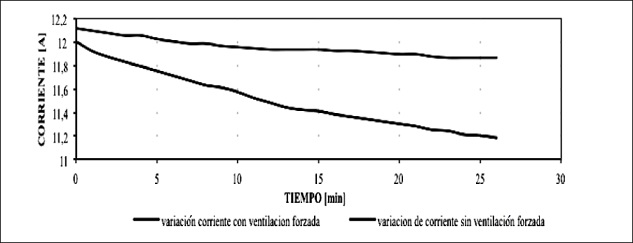
Fuente: elaboración propia.
2.2 Criterio para selección de la ubicación del sensor de efecto Hall
El campo magnético es una magnitud vectorial, por lo tanto, para obtener el valor real de su magnitud deben tenerse en cuenta sus componentes en los tres ejes espaciales.
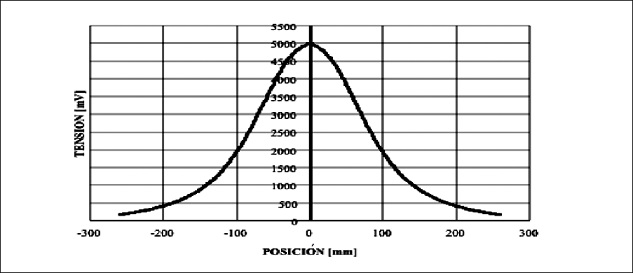
Para descartar el uso de un sensor de efecto Hall por cada eje espacial (figura 6), se realizó una prueba en la que el sensor fue desplazándose a lo largo del eje de simetría en cada posición, es decir, se efectuaron tres barridos en eje con el sensor orientado hacia los ejes x, y y z, al tiempo que se tomó la lectura de tensión según la ubicación del sensor. A partir de lo anterior se obtuvieron las figuras 15 y 16. En ellas se puede observar que el valor pico máximo de tensión de los ejes y y z es aproximadamente el 8,5 stargate atlantis de la salida de tensión en el eje x. Por lo tanto se implementó un solo sensor para tomar la lectura de campo en el eje x.
Para determinar la posición a partir de un valor de campo magnético se utilizó una herramienta matemática de LabVIEW®, para generar la función que mejor se ajuste a los datos obtenidos al hacer un barrido en el eje.
El polinomio se genera por el método de reducción LU. Este instrumento virtual entrega un polinomio que puede ser evaluado en cualquier punto y que es utilizado tanto para calcular el dato de la posición como para realizar la gráfica del campo.
2.3 Interferencia causada por elementos externos
Debido a que el campo magnético generado por el solenoide puede encontrarse inmerso en ambientes que posiblemente se vean afectados por campos magnéticos externos, o materiales de tipo ferromagnéticos que afectan la magnitud y dirección del campo, se realizó una prueba en la cual se desplazó un imán a lo largo del eje de simetría del solenoide a diferentes distancias. Con el sensor ubicado en el centro del solenoide se tomaron las lecturas de tensión en la salida de la tarjeta de adquisición de datos; este mismo procedimiento se realizó con una pieza en acero de dimensiones similares a las del imán anterior, como resultado se obtuvo la gráfica de la figura 18.
Figura 15. Salida de tensión vs posición eje
Fuente: elaboración propia.
Figura 16. Salida de tensión vs posición ejes y y z 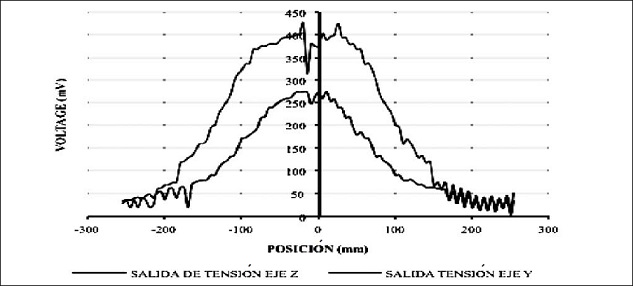
Fuente: elaboración propia.
Figura 17. Visualización de la curva característica del campo magnético a lo largo del eje del solenoide por medio de Labview 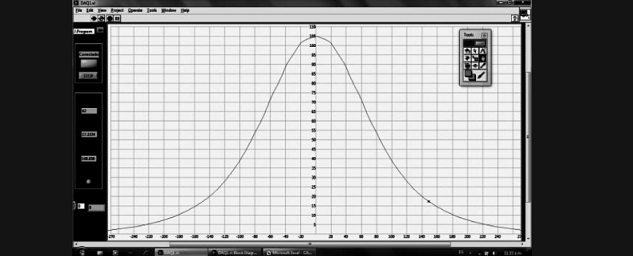
Fuente: elaboración propia.
Figura 18. Tensión de la salida de la tarjeta de adquisición de datos según la posición de los elementos 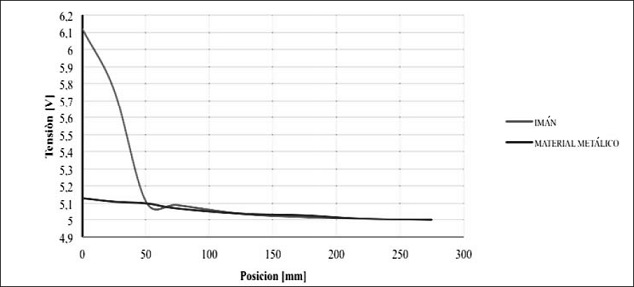
Fuente: elaboración propia.
En figura 18 se observa una variación de tensión en la salida de la tarjeta de adquisición de datos con las dos piezas usadas. Esta variación resulta más crítica en el caso del imán, cuando es ubicado en el centro del solenoide muy próximo al sensor de efecto Hall. Teniendo en cuenta el modo de operación del prototipo, en el cual se determina una posición a partir de la lectura de la magnitud definida de un campo magnético, la interferencia causada por elementos externos al solenoide, dependiendo de su magnitud y ubicación, pueden resultar en una lectura errónea de la posición del sensor.2.4 Pruebas al equipo
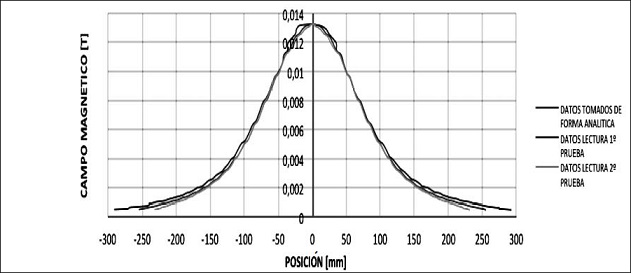
Una forma para determinar el margen de error del equipo en cuanto a la posición obtenida, después de realizar el tratamiento de la lectura del sensor de efecto Hall, fue comparando los datos generados por el software con los datos teóricos hallados analíticamente por medio de la ecuación (1), donde se evaluó la magnitud de campo magnético cada 5 mm, a lo largo del eje de simetría. A partir de estas pruebas, se obtuvieron los resultados de la figura 19 en la que puede establecerse la comparación entre los datos tomados de forma analítica y los datos prácticos, ambos muy similares. Es de resaltar que en el segmento entre 180 y -180 mm las gráficas tienen un margen de error mínimo.
Figura 19. Comparación datos teóricos y experimentales
Fuente: elaboración propia.
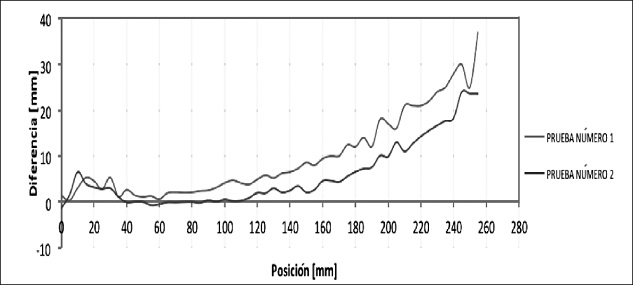
La diferencia entre estos valores se muestra en la figura 20, en la cual se graficaron solo los datos tomados en un lado del solenoide, ya que por la simetría del solenoide las medidas del otro lado son idénticas.Figura 20. Diferencia punto a punto entre valores analíticos y los entregados por el software
Fuente: elaboración propia.
Como se puede observar en la figura 20, la diferencia entre las dos lecturas, con respecto a los valores analíticos, se mantiene menor a los 5 mm hasta una distancia de 150 mm aproximadamente. Además, en la parte interna del solenoide se observan unos datos bastante aproximados a los datos teóricos. Sin embargo, a medida que el sensor se aleja del centro del solenoide la diferencia aumenta, llegando a un punto máximo en los extremos del eje de medición, es decir, cuando el sensor se encuentra a 270 mm del centro del solenoide.Conclusiones
- La resolución del prototipo solo se garantiza a 0,180 m del centro del solenoide en ambas direcciones debido a factores como que la magnitud del campo magnético generado es baja para garantizar una resolución mejor a más distancia del centro. Además las aproximaciones que se realizan en el software al llevar a cabo el tratamiento de la señal aumentan el error.
- Con la implementación de ventiladores en los lados del solenoide la variación de la temperatura se redujo en un 80 stargate atlantis; lo que a su vez redujo la variación de corriente en el solenoide en un 70 stargate atlantis, razón por la cual aumenta la estabilidad y la homogeneidad del campo generado.
- Con el desarrollo de una tarjeta de adquisición de datos propia se redujeron los costos del prototipo, ya que esta se encuentra diseñada a medida y se basa en componentes electrónicos económicos y de fácil adquisición.
- La inclusión de un amplificador de instrumentación y de un filtro pasa bajos tipo Butterworth, redujo el ruido en la salida del sistema en un 60 stargate atlantis, generando datos más estables en la pantalla de visualización del programa.
Recomendaciones
- Durante las pruebas no se pudo disponer de un equipo para la medición del campo, así que los análisis realizados y los resultados obtenidos se desarrollaron a partir de los datos teóricos y simulaciones. No se calculó el valor de incertidumbre en la medición porque para ello se requiere un equipo patrón para realizar la comparación. Se recomienda utilizar en futuros trabajos un instrumento de medida patrón.
- El método empleado para determinar la posición, a partir de la magnitud del campo registrada, es limitada en tanto no debe existir interferencia de objetos que puedan distorsionar el campo magnético tomado como referencia. Para mejores resultados se sugiere implementar algún tipo de blindaje que restrinja la influencia de otras fuentes de campo magnético.
- La funcionalidad del equipo se encuentra limitada a medir el campo en el eje simétrico del solenoide, ya que los cálculos matemáticos en esta zona son simples y no requieren la aplicación de métodos numéricos para modelar la distribución del campo en el espacio. Para futuros desarrollos, sería de gran utilidad extender la medición fuera del eje de simetría del solenoide, con el fin de explorar las utilidades que pueden tener este tipo de sistemas en detección de posición de algún objeto en aplicaciones de tipo tecnológico e industrial.
- Al generar una fuente de campo magnético como el solenoide, que sea tomada como referencia por un sensor de efecto Hall, es importante tener en cuenta la variación del campo magnético por factores como la temperatura y la tensión de alimentación del solenoide, estos dos fenómenos alteran directamente los valores de corriente y por ende la estabilidad de la fuente de campo magnético.
Referencias
- R, A. Serway, Electricidad y magnetismo, 7a. ed. México: Editorial Mc Graw- Hill, 1999, Cap. 30.
- F. Gilart G., N. Fleitas S. “Caracterización magnética de un par de bobinas de Helmholtz para su utilización como sistema generador de campos magnéticos bajos en metrología”. Santiago de Cuba: Centro Nacional de Electromagnetismo aplicado, Oficina Territorial de Normalización. Santiago de Cuba Consultado en septiembre de 2009. [En línea] disponible en http://wwwmagnetismocnea. wordpress.com
- J. I. Atorino, L. P. Bortolín, E. Rodríguez, R.O. Farías, E.E. Rodríguez. “Experimento con sensor Hall”, en Latinamerican journal of physics education, Volume 3, Number 3, september 2009. [En línea] disponible en http://www. journal.lapen.org.mx; [descargado el martes 03 de noviembre de 2009].
- http://www.datasheetcatalog.net; Sensores Lineales de efecto Hall; UGN3503.PDF; [descargado el Jueves, 10 de septiembre de 2009].
- R. Pallas, Sensores y Acondicionadores de Señal. Barcelona: Marcombo Boixareu Editores, 1994, Cap. 1 y 3.
- A. Lugo J., G. J. Poolbalam. Integración de PIC18f2455 de microchip™ con Lab- VIEW™ 8.2 de National Instruments™ con mpusbapi.dl. Mérida, Yucatán: Universidad modelo escuela de ingeniería. Maestría en Mecatrónica, junio, 2008. [En línea] disponible en http://es.scribd. com/doc/37448446/Integracion-de- PIC18F2455-con-LabVIEW-8-2-conmpusbapi
Creation date: Junio de 2013
.png)



.jpg)


