DOI:
https://doi.org/10.14483/22484728.4394Publicado:
2013-09-01Número:
Vol. 7 Núm. 1 (2013)Sección:
Visión de CasoAlfabetización tecnológica, un avance en ciudad bolívar
Technological literacy, a breakthrough in ciudad bolivar
Palabras clave:
constructivism, lego’s, laboratory guides, robots (en).Palabras clave:
Metodología constructivista, Lego, guía de laboratorio, robot. (es).Descargas
Referencias
L. M. Sánchez, “Proyectos de investigación Social”, Universidad de Antioquia. [En línea] disponible en http://aprendeenlinea.udea.edu.co/lms/investigacion/course/category.php?id=12.
Agencia de noticias Universidad Nacional, “Enfoques de la Intervención Social”, Universidad Nacional de Colombia. [En línea] disponible en http://www.agenciadenoticias.unal.edu.co/nc/detalle/article/diversos-enfoques-de-laintervencion-social/
A. L. Paz, “El concepto de intervención Social y sus retos frente a la gestión”. En Boletín POLIS, mayo, 2009.
O. León y C. Torres, “Diseño e implementación de una red LAN para salas de informática, implementación de guías de laboratorios de tecnología y enrutamiento de la emisora con protocolos ip (voip) en el colegio Arborizadora Alta de la localidad de Ciudad Bolívar”, Tesis de Tecnología Electrónica, Universidad Distrital Francisco José de Caldas, Bogotá, Colombia, 2010.
N. E. Rodríguez, W. E. Cortés y L. Pedraza, “Optimización tecnológica en el Colegio Unión Europea de la localidad de Ciudad Bolívar”. Tecnura, vol. 14, núm. 26, enero-junio, pp. 49-55, 2010.
Equipo Roboticaid, Proyectos Tecnológicos Educativos. Disponible en Línea. http://www.roboticaid.com/Documentos/Educaci%C3%B3n-Por-Medio-De-La-Rob%C3%B3tica
P. A. San Miguel. Electrónica Aplicada a los circuitos. 2010. Madrid: Ediciones paraninfo. pp. 5-34 [8] J. R. Santamaría S. “Material Capacitación de Electrónica para profesores de Artes Industriales”. (2006). Regional Cartago: Ministerio de Educación Pública Asesoría de Artes Industriales. Disponible en Línea: http://es.scribd.com/doc/92180477/manualelectronica-1a
Ministerio de Educación Nacional, República de Colombia. “Ser competente en tecnología: ¡una necesidad para el desarrollo!”, Orientaciones generales para la educación en tecnología, Serie guías n.º 30, mayo de 2008.
E. Díaz, “Enfoque constructivista como herramienta para el aprendizaje”. [En línea] disponible en http://www1.uprh.edu/ccc/Comunicacion/ENFOQUE%20CONSTRUCTIVISTA%20CCC%202.ppt
E. Serra, Introducción a los sensores y elementos de gobierno de Autómatas. 2001. [En línea] disponible en http://www.itescam.edu.mx/principal/sylabus/fpdb/recursos/r20017.PDF
C. Jaimes, J.E.Barrios, S.A. Caviedes. (2007). Informes seguidor de línea. Universidad de Pamplona, Facultad de Ingenierías y Arquitectura, Departamento de Mecatronica. Disponible en Línea: http://www.buenastareas.com/ensayos/Seguidor-De-Linea/273294.html
Cómo citar
APA
ACM
ACS
ABNT
Chicago
Harvard
IEEE
MLA
Turabian
Vancouver
Descargar cita
VISIÓN DE CASO
Visión Electrónica, 2013-06-03 Volumen:7, Año:1 pág: 65–76
ALFABETIZACIÓN TECNOLÓGICA, UN AVANCE EN CIUDAD BOLÍVAR
TECHNOLOGICAL LITERACY, A BREAKTHROUGH IN CIUDAD BOLIVAR
Fecha de envío: junio de 2011
Fecha de recepción: junio de 2011
Fecha de aceptación: febrero de 2012
Luis F. Pedraza
PhD(c) en Telecomunicaciones, Universidad Nacional de Colombia. Docente de planta de la Universidad Distrital Francisco José de Caldas (Colombia). Investigador del grupo GIDENUTAS. lfpedrazam@udistrital.edu.co.
Cesar A. Hernández
M.Sc. En Ciencias de la Información y las Comunicaciones con énfasis en Teleinformática e Ingeniero Electrónico de la Universidad Distrital Francisco José de Caldas, Bogotá D.C., Colombia. Investigador del grupo ARMOS. cahernandezs@udistrital.edu.co
Octavio J. Salcedo
Ingeniero de Sistemas y MSc., en Teleinformática, Universidad Distrital Francisco José de Caldas (Colombia). Docente de planta de la Universidad Distrital Francisco José de Caldas (Colombia). Correo: osalcedo@udistrital.edu.co
RESUMEN
En este artículo se describen los pasos y las pautas para desarrollar e implementar en el colegio Don Bosco I, ubicado en la localidad de Ciudad Bolívar de Bogotá (Colombia), guías de laboratorio para los estudiantes de grado noveno, décimo y once de educación media; adicionalmente, se diseñaron tres tipos de robots usando materiales tipo lego. Finalmente, se presentan los resultados obtenidos con este proyecto de intervención social en alfabetización y tecnología.
Palabras claveMetodología constructivista, Lego, guía de laboratorio, robot.
Abstract
In this paper the steps and patterns used are showed, for develop and implement at the Don Bosco I school, located in Ciudad Bolivar locality in Bogotá, laboratory guides to ninth, tenth and eleven grade students; additionally, three types of robberies using Lego materials are designed. Finally, also are presents the results obtained with this social intervention project in technological literacg.
Key Wordsconstructivism, lego’s, laboratory guides, robots.
Introducción
El grupo de investigación Gidenutas, de la Facultad Tecnológica de la Universidad Distrital, busca analizar las necesidades tecnológicas que presenta el Colegio Don Bosco I, ubicado en la localidad de Ciudad Bolívar, Bogotá. El plantel cuenta con materiales tipo lego, los cuales no han sido usados debido a que los docentes desconocen su manejo. Paralelo a ello, el grupo desea apoyar el énfasis de tecnología en el colegio desarrollando guías de laboratorio en electrónica básica para los grados noveno, décimo y once, guías que sirven de ayuda para los docentes.
Las anteriores ideas se enmarcan en la denominada intervención social, tema que está tocando las puertas de las universidades del país, puesto que problemáticas como la falta de educación e incentivación en los niños y jóvenes de escasos recursos es un asunto que demanda una participación inmediata. A continuación, se exponen algunos proyectos de intervención social realizados por distintas entidades.
La Universidad de Antioquia [1] presenta un proyecto de investigación formativa que tiene como objetivo producir conocimiento sobre intervención social en ciencias sociales y trabajo social. Por su parte, la Universidad Nacional [2] desde el programa de Trabajo Social publica un artículo que plantea a la intervención social como un espacio privilegiado de conocimiento e interacción con la cuestión social contemporánea, además de proyectarla como un ámbito laboral que impulsa el desarrollo de distintas disciplinas y profesiones en el marco de las ciencias sociales y humanas. Entre tanto, la Universidad ICESI [3] define qué es la intervención social y su importancia en diferentes comunidades situadas en Cali. De igual modo, en León y Torres [4] y Cortés y Rodríguez [5] se observan proyectos de intervención social desarrollados por estudiantes de la Universidad Distrital, en una pasantía que busca ayudar a los jóvenes de la localidad de Ciudad Bolívar a aprender sobre tecnología y electrónica mediante estrategias didácticas. Por último, en el ámbito industrial empresas como Roboticaid [6] desarrollan proyectos de tecnología dirigidos a estudiantes de todos los grados con materiales de bajo costo.
1. Guías de laboratorio de electrónica
Las herramientas implantadas de tipo educativo en el Colegio Don Bosco I son guías diseñadas para trabajar temas relacionados con electrónica básica, teoría de circuitos y sistemas digitales, con proyectos de gran interés para los alumnos. El fin de las guías es pedagógico, puesto que con ellas se busca no solo incentivar a los jóvenes hacia la electrónica, sino que además adquieran una perspectiva de desarrollo profesional.
Se diseñaron tres guías, una para cada grado empezando con noveno, y cada guía contiene temas relacionados con la electrónica. En la tabla 1 se observan los contenidos implementados en cada curso y en la tabla 2 se muestra la distribución de estos temas.
Tabla 1. Temáticas de las guías de laboratorio de electrónica
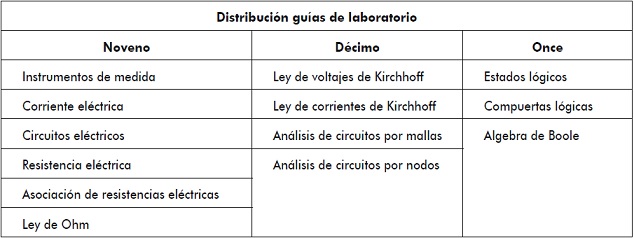
Fuente: elaboración propia.
Tabla 2. Distribución de las guías de laboratorio
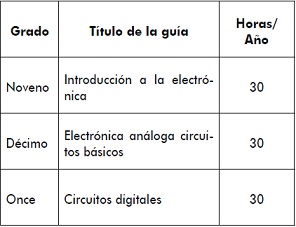
Fuente: elaboración propia.
Con estas guías se espera que los jóvenes conozcan las temáticas fundamentales de la electrónica de una manera sencilla y práctica, lo cual se logra dividiendo el tema de cada libro en clases de una a dos sesiones. Para cada clase se propone la siguiente estructura (ciertas clases pueden contener solo alguno de los ítems):
- Marco teórico.
- Explicación del tema.
- Explicación matemática.
- Ejemplos.
Para la segunda sesión de cada clase se propone el desarrollo a continuación (las sesiones pueden contener solo alguno de los siguientes):
- Laboratorio.
- Ejercicios de repaso.
- Tarea en casa.
De esta manera, para la clase titulada “Manejo del Multímetro”, por ejemplo, en la primera sesión se brinda una breve explicación de este instrumento de medida y su forma de uso. Para la segunda sesión se propone un laboratorio en el cual los estudiantes lleven baterías y componentes de diferentes valores, de manera que puedan verificar el voltaje de cada uno; adicionalmente, se proponen unos ejercicios y una tarea concerniente a la siguiente clase.
De esta manera, para la clase titulada “Manejo del Multímetro”, por ejemplo, en la primera sesión se brinda una breve explicación de este instrumento de medida y su forma de uso. Para la segunda sesión se propone un laboratorio en el cual los estudiantes lleven baterías y componentes de diferentes valores, de manera que puedan verificar el voltaje de cada uno; adicionalmente, se proponen unos ejercicios y una tarea concerniente a la siguiente clase.
Es importante mencionar que los textos de San Miguel [7] y Santamaría (usando Cekit) [8] se emplearon como referencia para la elaboración de las guías; de igual manera, el documento titulado Ser competente en Tecnología: una oportunidad para el desarrollo [9], que muestra el plan de estudios para los alumnos de colegios públicos expedido por la Secretaría de Educación, se toma como referencia para el diseño de las guías de laboratorio.
Para el desarrollo satisfactorio de las guías de laboratorio, se recomienda a los docentes del área de tecnología el siguiente procedimiento:
- Explicar el contenido de la guía, así como su forma de evaluación.
- Brindar el conocimiento necesario para que los estudiantes puedan resolver la actividad práctica.
- Analizar con los estudiantes el resultado de la práctica desarrollada.
El procedimiento que se lleva a cabo para la elaboración de las guías de laboratorio se observa en la figura 1.
Figura 1. Adaptador de socket
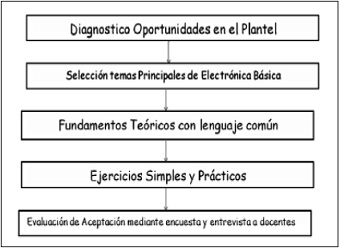
Fuente: elaboración propia.
1.1 Metodología desarrollada
Para una implementación óptima de las guías de laboratorio se usa el modelo pedagógico constructivista, el cual se basa en que el alumno debe crear su propio conocimiento. De igual forma, mediante la guía del profesor el estudiante desarrolla su responsabilidad, y de esta manera se educa para la toma de decisiones. Los beneficios que obtienen los estudiantes son [10]:
- El estudiante aprende más y disfruta el aprendizaje porque está activamente más involucrado consigo mismo, en lugar de ser un ente pasivo.
- La educación trabaja mejor cuando se concentra en el pensamiento crítico y el entendimiento, en lugar de dedicarse a la memorización. El constructivismo se concentra en el aprendizaje de cómo pensar y entender.
- El aprendizaje constructivista es transferible. En aquellos salones donde se usa el enfoque constructivista, los estudiantes crean patrones de aprendizaje que pueden transferirse a otros escenarios educativos.
- El constructivismo le brinda control al estudiante sobre su aprendizaje, debido a que se basa en la exploración y las preguntas formuladas por él mismo. Quien por lo general tiene acceso al diseño y evaluación del proceso.
2. Herramientas tecnológicas implementadas en el Colegio Don Bosco I
Al analizar las herramientas con las que cuenta el colegio y el conocimiento que sus alumnos adquieren luego de terminar los temas de cada guía, se diseñan e implementan tres robots “uno para cada curso” con el fin de mostrar a los estudiantes una aplicación de lo aprendido en la electrónica que está a su alcance y entendimiento.
2.1. Diagrama de bloques de los robots
El diseño de los tres robots se basa en el diagrama de bloques que se observa en la figura 2.
Figura 2. Diagrama de bloques robots construidos con material lego
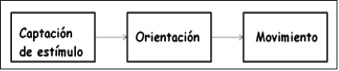
Fuente: elaboración propia.
A continuación se describen cada uno de los tres robots diseñados.
2.2. Robot buscador de camino
Este robot está diseñado para buscar un camino despejado una vez hace contacto con algún obstáculo. El diagrama de bloques de la figura 2 se detalla a continuación.
2.2.1 Bloque captación de estímulo
En este bloque se encuentra el tipo de sensor utilizado en el diseño del robot. Para este caso se usan sensores de contacto conocidos como “finales de carrera”, estos son “elementos actuadores de conmutación, generalmente provistos de muelles y utilizados en procesos automáticos donde la detección debe ser más robusta” [11]. En el texto Introducción a los sensores y elementos de gobierno de Autómatas de Serra se encuentran sus características y aplicaciones.
2.2.2 Bloque orientación
Este bloque usa un sistema de encendido el cual permite que se encuentre siempre en movimiento. En este caso la orientación la determina el sentido de giro de los motores, ya que al activar un sensor el motor del lado opuesto gira en sentido contrario.
2.2.3 Bloque movimiento
Al no poseer componentes discretos, en este bloque solo se utilizan los motores que, en este caso, son de 5V. Para su funcionamiento se usan dos sensores táctiles, de forma que cuando está encendido y encuentra un obstáculo por un lado, el robot gira levemente hasta evitar el obstáculo y seguir su camino.
Al analizar varias posibilidades de diseño, se llega a la conclusión de que la mejor estructura para el buen funcionamiento del robot es la de un cuadrado.
2.2.4 Diseño de circuito
El robot se diseñó para los estudiantes de grado noveno, ya que sus componentes son pocos y fáciles de identificar para las personas que están incursionando en el tema de la electrónica, debido a su simplicidad no hay necesidad de realizar cálculos teóricos para su implementación.
En la figura 3 se observa el diagrama eléctrico del robot y en la figura 4 su apariencia. En la tabla 3 se encuentran los materiales usados para su construcción.
Figura 3. Diagrama eléctrico robot buscador de camino
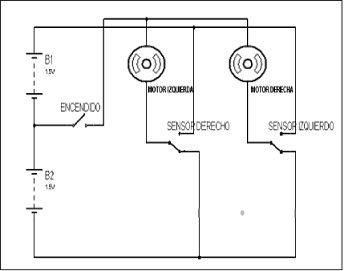
Fuente: elaboración propia.
Figura 4. Apariencia predeterminada robot buscador de camino
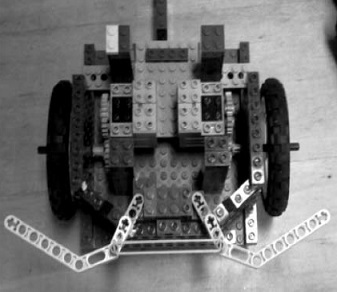
Fuente: elaboración propia.
Tabla 3. Materiales usados para el robot buscador de camino
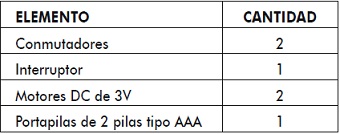
Fuente: elaboración propia.
En la tabla 4 se encuentran las características principales para la construcción de la carcasa.
Tabla 4. Especificaciones robot buscador de camino

Fuente: elaboración propia.
2.3 Robot seguidor de luz
Este robot está diseñado para seguir una fuente de luz.
El diagrama de bloques se detalla en la figura 2, y el diagrama eléctrico de este robot se muestra en la figura 5.
Figura 5. Diagrama eléctrico robot seguidor de luz
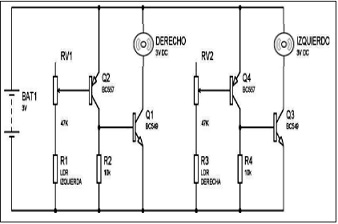
Fuente: elaboración propia.
2.3.1 Bloque captación de estimulo
En este bloque se encuentra el tipo de sensor que se utiliza en el robot. En este caso se trata de una fotocelda, la cual disminuye su resistencia al aplicarle una fuente de luz.
2.3.2 Bloque orientación
Este bloque consiste en el giro del robot hacia la fuente de luz, para ello el diseño se elabora de tal manera que la fotocelda controle el motor del lado opuesto, y lo active cuando la luz incida sobre esta. Para controlar la sensibilidad de las fotoceldas se emplean resistencias variables.
2.3.3 Bloque movimiento
Para asegurar un flujo de corriente hacia el motor, en este bloque se han incorporado dos transistores complementarios los cuales amplifican la corriente proveniente de la fotocelda. En este diseño el robot no entra en movimiento hasta que las fotoceldas sean iluminadas.
2.3.4 Funcionamiento
Las fotoceldas son ajustadas mediante resistencias variables, cuando una fuente de luz es apuntada hacia ellas estas bajan su resistencia, y así se conduce la corriente que hace que también entren en conducción los transistores Q1 y Q2. Estos amplifican la corriente proveniente de las fotoceldas y la envían al motor del lado opuesto a la foto celda iluminada Los transistores Q3 y Q4 cumplen la misma función.
2.3.5 Diseño del circuito
El robot está enfocado a los estudiantes de grado décimo debido a que muestra el funcionamiento de sensores básicos. Los cálculos realizados para su óptimo funcionamiento se describen a continuación.
Al iluminar completamente la fotocelda, esta tiene un valor de 1,2 kO, y la corriente que circula por ella es:
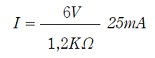 (1)
(1)
Esta corriente es mayor de la que soportan los transistores Q2 y Q4, por ello es necesario realizar un divisor de tensión usando la corriente mínima con la que se activa el transistor BC557, como se muestra en la ecuación (2).
 (2)
(2)
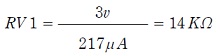
Este es el valor mínimo que puede tomar la resistencia, por ello para ajustar su valor se decide usar una resistencia variable (RV1).
Para poder alimentar los motores se necesita una corriente de 217 �A, debido a que la corriente a la salida de la fotocelda es de 69,5 �A, cuando existe una mínima cantidad de luz e incide así sobre ella; por lo tanto, debe amplificarse la corriente que se dirige al motor y hallar los siguientes valores de resistencias:
 (3)
(3)
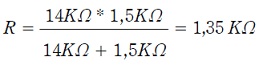
Luego puede encontrarse el valor de la resistencia del colector, como se observa en la ecuación (4):
 (4)
(4)
Para aproximarla a un valor comercial se usa una resistencia de 10 kO (R2 y R4 en la figura 5).
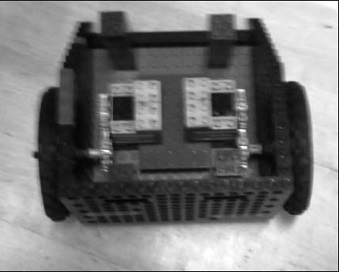
En la figura 6 se observa la apariencia del robot y en la tabla 5 se encuentran los materiales usados para su construcción; a su vez, en la tabla 6 se describen sus especificaciones físicas.
Figura 6. Apariencia predeterminada robot seguidor de luz
Fuente: elaboración propia.
Tabla 5. Materiales robot seguidor de luz
Fuente: elaboración propia.
Tabla 6. (a) Especificaciones físicas robot seguidor de luz

Fuente: elaboración propia.
2.4 Seguidor de línea
Este robot está diseñado para seguir una línea negra sobre un fondo blanco.
La descripción del diagrama de bloques de la figura 2 para este robot se presenta a continuación, y el diagrama eléctrico se muestra en la figura 7.
Figura 7. Diagrama eléctrico robot seguidor de línea
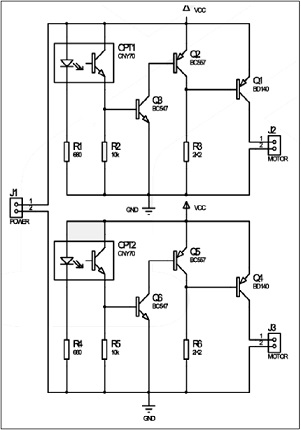
Fuente: elaboración propia.
2.4.1 Bloque captación de estímulo
En este bloque se describe el tipo de sensor que se usa durante el diseño; para este robot es el CNY70. En Jaimes [12] se encuentran sus características y su composición interna.
2.4.2 Bloque orientación
La descripción de este bloque es similar a la del robot seguidor de luz; sin embargo, la sensibilidad de los sensores se encuentra parametrizada.
2.4.3 Bloque movimiento
Al igual que con el robot seguidor de luz, este diseño emplea también transistores complementarios y el transistor BD140 (Q1 y Q4 en la figura 7), el cual amplifica la corriente hacia los motores.
2.4.4 Funcionamiento
El led emisor del sensor CNY70 se alimenta a través de una resistencia (R1 de la fi gura 7) de 680 O. Cuando una superfi cie refl ectante como el color blanco de la ruta refl eja la luz del led emisor, el fototransistor contenido en el sensor CNY70 permite que se active el motor a través de los transistores Q1, Q2 y Q3 o Q4, Q5 y Q6.
2.4.5 Diseño
El robot está enfocado hacia los alumnos de grado once de la institución, debido a que cuenta con componentes un poco más sofisticados que aquellos para los grados anteriores.
A continuación se encuentran los cálculos teóricos usados:
Para polarizar el diodo del sensor CNY70 se usa una resistencia de 680 O, para asegurar una corriente de mínimo 8 mA, como se observa en la ecuación (5).
 (5)
(5)
La aproximación comercial es 680 O (R1 en la figura 7).
Se usan los transistores BC547 y BD557 para invertir la señal proveniente del sensor CNY70; el transistor BD140 funciona como driver para alimentar el motor.
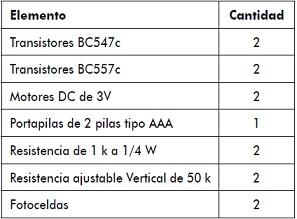
En la figura 7 se puede apreciar el diseño esquemático explicado en el funcionamiento del circuito, en la figura 8 su apariencia, en la tabla 7 los materiales usados y en la tabla 8 las especificaciones físicas.
Tabla 7. Materiales robot seguidor de línea
Fuente: elaboración propia.
Figura 8. Apariencia predeterminada robot seguidor de línea
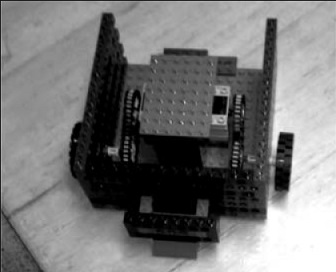
Fuente: elaboración propia.
Tabla 8. Especificaciones físicas robot seguidor de línea

Fuente: elaboración propia.
3. Resultados obtenidos
Para probar la teoría de las guías y la efectividad de la metodología se desarrolla una encuesta a tres grupos de estudiantes, cada uno de 35 alumnos. El primer grupo recibe una clase sin ayuda de las guías ni de las prácticas que incluyen estas, el segundo grupo toma una clase con ayuda de las guías, pero sin las prácticas, y el tercer grupo asiste a una clase con las guías y desarrolla sus prácticas. Al terminar este proceso, se les formula a los alumnos la siguiente pregunta: ¿se entendió de forma clara el tema explicado? Las posibles respuestas son:
- No entendí el tema.
- Sí entendí el tema.
- Entendí una parte del tema.
Los resultados de la encuesta se exponen a continuación. De la encuesta al primer grupo (figura 9), se llega a la conclusión de que los jóvenes enseñados sin las guías y sin las prácticas no son muy receptivos al tema. Por su parte, la encuesta al segundo grupo (figura 10) da una clara visión de la ayuda que les brindan las guías a estos jóvenes, lo que evidencia el buen resultado que puede llegar a tener el proyecto. Al analizar la encuesta del tercer grupo (figura 11) se observa que el resultado de la aplicación de las guías, junto con las prácticas, es mucho más eficiente que trabajar solo con la teoría, es decir, con las guías pero sin las prácticas. Esto muestra que la ayuda de las guías y sus prácticas propuestas son de gran utilidad para que el maestro y el alumno puedan desarrollar mejor su clase, y para que los temas enseñados sean más fáciles de interpretar por los estudiantes; de manera que desarrollan su propio conocimiento y despiertan su interés en el tema de la electrónica.
Figura 9. Resultados grupo 1 y sin prácticas
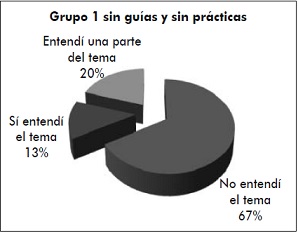
Fuente: elaboración propia.
Figura 10. Resultados grupo 2 y sin prácticas
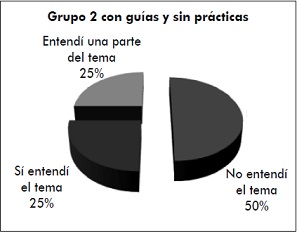
Fuente: elaboración propia.
Figura 11. Resultados grupo 3
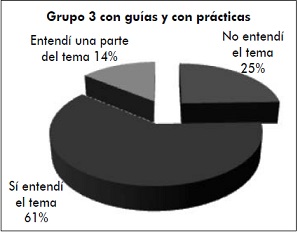
Fuente: elaboración propia.
4. Conclusiones
- Las guías de laboratorio son diseñadas con un lenguaje fácil de entender para estudiantes de grado noveno, décimo y once. Con estas guías se ha logrado que los estudiantes comprendan los conceptos básicos de electrónica análoga y digital, antes de que terminen su ciclo bachiller.
- Es necesario incentivar la curiosidad hacia la tecnología por parte de los estudiantes, de otra manera las guías no tendrán suficiente efecto sobre ellos.
- Las guías son una herramienta muy útil, pero deben complementarse con prácticas y laboratorios para que de esta forma los alumnos puedan llevar a la práctica todos los temas trabajados anteriormente en clase.
- Con la implementación de este proyecto los estudiantes no solo se incentivan a conocer la electrónica, sino que también ven la posibilidad de ingresar a la educación superior como una opción de vida, debido a los acercamientos pedagógicos que obtienen durante las capacitaciones.
- Con la implementación de los robots los estudiantes desarrollan su creatividad al diseñar la apariencia de los robots a partir de lo aprendido durante el desarrollo del curso.
- Las guías son diseñadas de forma didáctica y muy clara para que cualquier alumno esté en la capacidad de leer y entender perfectamente el tema que se va a explicar.
- Se implementan tres robots construidos con materiales tipo lego, los cuales dan una imagen más clara a los estudiantes sobre determinados temas encontrados en las guías.
References
- L. M. Sánchez, “Proyectos de investigación Social”, Universidad de Antioquia. [En línea] disponible en http:// aprendeenlinea.udea.edu.co/lms/investigacion/ course/category.php?id=12.
- Agencia de noticias Universidad Nacional, “Enfoques de la Intervención Social”, Universidad Nacional de Colombia. [En línea] disponible en http:// www.agenciadenoticias.unal.edu.co/nc/ detalle/article/diversos-enfoques-de-laintervencion- social/
- A. L. Paz, “El concepto de intervención Social y sus retos frente a la gestión”. En Boletín POLIS, mayo, 2009.
- O. León y C. Torres, “Diseño e implementación de una red LAN para salas de informática, implementación de guías de laboratorios de tecnología y enrutamiento de la emisora con protocolos ip (voip) en el colegio Arborizadora Alta de la localidad de Ciudad Bolívar”, Tesis de Tecnología Electrónica, Universidad Distrital Francisco José de Caldas, Bogotá, Colombia, 2010.
- N. E. Rodríguez, W. E. Cortés y L. Pedraza, “Optimización tecnológica en el Colegio Unión Europea de la localidad de Ciudad Bolívar”. Tecnura, vol. 14, núm. 26, enero-junio, pp. 49-55, 2010.
- Equipo Roboticaid, Proyectos Tecnológicos Educativos. Disponible en Línea. http://www.roboticaid.com/Documentos/ Educaci%C3%B3n-Por-Medio-De- La-Rob%C3%B3tica
- P. A. San Miguel. Electrónica Aplicada a los circuitos. 2010. Madrid: Ediciones paraninfo. pp. 5-34
- J. R. Santamaría S. “Material Capacitación de Electrónica para profesores de Artes Industriales”. (2006). Regional Cartago: Ministerio de Educación Pública Asesoría de Artes Industriales. Disponible en Línea: http://es.scribd.com/ doc/92180477/manualelectronica-1a
- Ministerio de Educación Nacional, República de Colombia. “Ser competente en tecnología: una necesidad para el desarrollo!”, Orientaciones generales para la educación en tecnología, Serie guías n.°30, mayo de 2008.
- E. Díaz, “Enfoque constructivista como herramienta para el aprendizaje”. [En línea] disponible en http://www1. uprh.edu/ccc/Comunicacion/ENFOQUE% 20CONSTRUCTIVISTA%20 CCC%202.ppt
- E. Serra, Introducción a los sensores y elementos de gobierno de Autómatas. 2001. [En línea] disponible en http:// www.itescam.edu.mx/principal/sylabus/ fpdb/recursos/r20017.PDF
- C. Jaimes, J.E.Barrios, S.A. Caviedes. (2007). Informes seguidor de línea. Universidad de Pamplona, Facultad de Ingenierías y Arquitectura, Departamento de Mecatronica. Disponible en Línea: http://www.buenastareas.com/ensayos/ Seguidor-De-Linea/273294.html
Creation date: Junio de 2013
.png)



.jpg)


