DOI:
https://doi.org/10.14483/2248762X.6404Publicado:
2012-08-30Número:
Vol. 3 Núm. 1 (2012)Sección:
InvestigaciónTRANSPORTE COOPERATIVO DE OBJETOS CON UNA PLATAFORMA MÓVIL EN UN ENTORNO ESTRUCTURADO
Descargas
Cómo citar
APA
Beltran Gonzalez, E. A. (2012). TRANSPORTE COOPERATIVO DE OBJETOS CON UNA PLATAFORMA MÓVIL EN UN ENTORNO ESTRUCTURADO. Redes de Ingeniería, 3(1), 12–22. https://doi.org/10.14483/2248762X.6404
ACM
[1]
Beltran Gonzalez, E.A. 2012. TRANSPORTE COOPERATIVO DE OBJETOS CON UNA PLATAFORMA MÓVIL EN UN ENTORNO ESTRUCTURADO. Redes de Ingeniería. 3, 1 (ago. 2012), 12–22. DOI:https://doi.org/10.14483/2248762X.6404.
ACS
(1)
Beltran Gonzalez, E. A. TRANSPORTE COOPERATIVO DE OBJETOS CON UNA PLATAFORMA MÓVIL EN UN ENTORNO ESTRUCTURADO. redes ing. 2012, 3, 12-22.
ABNT
BELTRAN GONZALEZ, Edwin Andres. TRANSPORTE COOPERATIVO DE OBJETOS CON UNA PLATAFORMA MÓVIL EN UN ENTORNO ESTRUCTURADO. Redes de Ingeniería, [S. l.], v. 3, n. 1, p. 12–22, 2012. DOI: 10.14483/2248762X.6404. Disponível em: https://revistas.udistrital.edu.co/index.php/REDES/article/view/6404. Acesso em: 29 jul. 2026.
Chicago
Beltran Gonzalez, Edwin Andres. 2012. «TRANSPORTE COOPERATIVO DE OBJETOS CON UNA PLATAFORMA MÓVIL EN UN ENTORNO ESTRUCTURADO». Redes de Ingeniería 3 (1):12-22. https://doi.org/10.14483/2248762X.6404.
Harvard
Beltran Gonzalez, E. A. (2012) «TRANSPORTE COOPERATIVO DE OBJETOS CON UNA PLATAFORMA MÓVIL EN UN ENTORNO ESTRUCTURADO», Redes de Ingeniería, 3(1), pp. 12–22. doi: 10.14483/2248762X.6404.
IEEE
[1]
E. A. Beltran Gonzalez, «TRANSPORTE COOPERATIVO DE OBJETOS CON UNA PLATAFORMA MÓVIL EN UN ENTORNO ESTRUCTURADO», redes ing., vol. 3, n.º 1, pp. 12–22, ago. 2012.
MLA
Beltran Gonzalez, Edwin Andres. «TRANSPORTE COOPERATIVO DE OBJETOS CON UNA PLATAFORMA MÓVIL EN UN ENTORNO ESTRUCTURADO». Redes de Ingeniería, vol. 3, n.º 1, agosto de 2012, pp. 12-22, doi:10.14483/2248762X.6404.
Turabian
Beltran Gonzalez, Edwin Andres. «TRANSPORTE COOPERATIVO DE OBJETOS CON UNA PLATAFORMA MÓVIL EN UN ENTORNO ESTRUCTURADO». Redes de Ingeniería 3, no. 1 (agosto 30, 2012): 12–22. Accedido julio 29, 2026. https://revistas.udistrital.edu.co/index.php/REDES/article/view/6404.
Vancouver
1.
Beltran Gonzalez EA. TRANSPORTE COOPERATIVO DE OBJETOS CON UNA PLATAFORMA MÓVIL EN UN ENTORNO ESTRUCTURADO. redes ing. [Internet]. 30 de agosto de 2012 [citado 29 de julio de 2026];3(1):12-2. Disponible en: https://revistas.udistrital.edu.co/index.php/REDES/article/view/6404
Descargar cita
TRANSPORTE COOPERATIVO
DE OBJETOS CON UNA
PLATAFORMA MÓVIL EN UN
ENTORNO ESTRUCTURADO
COOPERATIVE TRANSPORT
OF OBJECTS USING
Edwin Andrés Beltrán
González
A MOBILE PLATFORM
WITHIN A STRUCTURED
ENVIRONMENT
Tecnólogo en
Electrónica
Universidad Distrital
Francisco José
ABSTRACT
Bogotá, Colombia
Cooperative robotics
is intended to design systems that consist of various
Bogotá, Colombia
robots capable of
solving problems jointly. Therefore, implementations
of this nature might
require various types of control (either centralized
or distributed).
Based on these ideas, object transport has become one
of the challenges
within this research field. The point is to implement
various strategies
ranging from pulling objects to actually lifting them or
dragging them. These
types of tasks have been addressed since the 90s up
until recently. The
present work attempts to show the development and
implementation of a
cooperative robotic platform applied to large-object
transport by means of
a structured environment, using the tools provided
by the LEGO
MINDSTORMS RCX 2.0 kit and some other tools belonging to
a research group
called ROMA (Robótica Móvil Autónoma).
Key words:
cooperative
robotics, robotic systems, multi-agent,
coordination,
communication.
RESUMEN
La robótica
cooperativa busca diseñar sistemas compuestos de
varios robots
capaces de resolver problemas conjuntamente, de tal
manera que dicha
implementación puede llevar consigo distintos
tipos de control
(centralizado o distribuido), de esta manera una
de las aplicaciones
en esta línea de investigación es el transporte de
objetos mediante
distintas estrategias que van desde el empuje, la
sujeción y arrastre
de los objetos; tales trabajos se han presentado
desde la década de
los 90 hasta el día de hoy. El enfoque del
presente artículo
busca mostrar el desarrollo e implementación
de una plataforma
robótica cooperativa aplicada al transporte de
objetos largos a
través de un entorno estructurado utilizando las
herramientas que
provee el kit Lego Mindstorms RCX 2.0 y el grupo
de investigación en
robótica móvil autónoma ROMA.
Palabras claves
: robótica
cooperativa, sistemas robóticos multi-
Tipo:
Artículo de
investigación
agente,
coordinación, comunicación.
Fecha de Recepción:
Enero 12 de 2012
Fecha de Aceptación:
Marzo 9 de 2012
12
ISSN: 2248 – 762X │
Vol. 3 │ No. 1 │ Pág. 12-22 │ Enero - Julio 2012
1. INTRODUCCIÓN
mínimamente puede
generar comportamientos
colectivos a gran
escala. Por otra parte están
En la actualidad
los desarrollos en el campo
los sistemas
intencionalmente cooperativos en
de la robótica
están centrados en el diseño
los cuales cada robot esta finamente ligado a
de sistemas
robóticos multiagente para
los demás y
constantemente sabe la ubicación,
aplicaciones que
van desde la navegación
en
estado, creencias e información de cada uno de
entornos
estructurados y poco
estructurados
los integrantes del equipo, de esta manera todos
hasta el transporte
cooperativo de objetos.
apuntan hacia una
misma meta, sus protocolos
de comunicación
permiten establecer dos
Dentro del grupo de
investigación en robótica
tipos de solución.
Dentro de ellos la primera
móvil autónoma
(ROMA) estamos conscientes
es una solución
fuertemente cooperativa
de la necesidad de
explorar el campo de la
donde cada uno de
los robots hace parte de
robótica
cooperativa y así estar a la vanguardia
una sola unidad
mayor, en la cual todos los
a nivel mundial,
por tal motivo el objetivo de este
robots
apuntan hacia una misma tarea y cada
artículo es mostrar
los resultados obtenidos con
uno aporta sus
capacidades individuales para
el diseño e
implementación de una plataforma
mejorar las
capacidades globales. La segunda
móvil aplicada en
trabajo cooperativo para el
es una solución
débilmente cooperativa en
transporte de
objetos dentro de un escenario
donde los robots
tienen ciertos tiempos de
estructurado
utilizando las herramientas que
independencia y
pueden realizar las acciones
ofrece el kit Lego
Mindstorms RCX 2.0® [1].
que vean
convenientes pero que a la hora de
evaluar un
resultado global no aportan a la
1.1. Sistemas
robóticos multiagente
solución del
problema general [11].
Un sistema
multi-robot [2], [3] se define
Los sistemas
multi-robot son también llamados
como un conjunto de
robots situados en un
sistemas robóticos
multiagente [2], debido a
entorno común pero
que no necesariamente
que sus categorías
involucran implícitamente
poseen capacidades
para interactuar con
el concepto de
robot agente [6], [10], así, para
otros robots o
presentan un comportamiento
poder llevar a cabo
una mínima interacción
proactivo; por
ejemplo un conjunto de robots
cada autómata debe
percibir su medio, poseer
seguidores de línea
sobre un tablero común
mecanismos de
decisión de acciones y desde
puede ser
catalogado como un sistema multi-
luego un
conocimiento de la evolución del
robot, sin embargo
estos últimos no cumplen
medio con las
acciones realizadas por él y por
las características
identificadas en [4], [5] y
los integrantes del
equipo.
solo aquellos
prototipos que cumplan estas
características
pueden ser denominados como
Un primer término
que se debe explorar
agentes robóticos
[6], [10].
a la hora de hablar
de sistemas robóticos
multiagente es el
de “coordinación” que se
Por lo general
cuando se habla de
sistemas
define [12], [13] como la propiedad que tiene
multi-robot,
existen dos categorías generales
un conjunto de
agentes para realizar alguna
para abordar la
temática: los sistemas
actividad
colectiva; el grado de coordinación
de enjambres
colectivos y los sistemas
exhibido por un
conjunto de agentes es el área
intencionalmente
cooperativos.
en que se pueden
evitar para realizar un trabajo
articulado. Una
coordinación efectiva implica
Los sistemas de
enjambres colectivos son
un grado de
predictibilidad mutua y cuantos
aquellos en los que
los robots ejecutan
más conflictos
inesperados se den, peor están
sus tareas con un
conocimiento mínimo o
coordinados los
agentes robot.
nulo acerca del
estado o progreso de los
demás robots del
equipo, por lo general esta
De lo anterior se
desprende la definición de
concepción está
basada en el principio de que
“cooperación” que
según [10], [14] es una
un grupo numeroso
de robots comunicándose
forma de
interacción mediante comunicación
13
Vol. 3 │ No. 1 │
Enero - Julio 2012
directa [15] en la
cual el sistema robótico
Kube [18], [19]
presento el primer modelo
multiagente presenta
un comportamiento
formal para
transporte cooperativo cuyo
de trabajo
colaborativo en aras de conseguir
enfoque fue la
resolución de problemas
una meta común
consiguiendo resultados de
descentralizadamente. En este trabajo el autor
manera más efectiva
en un menor tiempo.
muestra que si el
tamaño del objeto es más
pequeño respecto al
sistema de sujeción de los
El
incremento
en
el
desempeño
del
robots el desempeño
de la plataforma decrece
sistema robótico
multiagente evidencia un
drásticamente ya
que la superficie de contacto
comportamiento
meramente cooperativo, para
es limitada.
lo cual el mecanismo
de control puede estar
basado en la
imposición por parte de diseñador
Wang et al [20]
desarrollo un sistema multi-
de una o varias
estructuras de control que
robot enfocado en
el transporte de objetos
generen las
dinámicas de interacción de los
cooperativamente
para lo cual utilizo una
comportamientos
presentados por los agentes
estrategia que le
permitía atrapar o encerrar
robot.
el objeto con los
robots a través del diseño
de algoritmos
descentralizados basados en
2. TRABAJOS
REALIZADOS ALREDEDOR
campos de potencial
que le permitieron a
DEL TRANSPORTE
COOPERATIVO
la plataforma
mantener el objeto atrapado
simultáneamente de
irlo arrastrando hasta una
Una de las
aplicaciones del trabajo cooperativo
meta deseada.
es el transporte de
objetos que muchas
veces suele ser un
problema para un solo
Gross et al [21],
[22] diseño un sistema
robot, mediante la
utilización de múltiples
completamente
descentralizado en el marco
mecanismos como
sujeción, truncamiento
del proyecto
Swarm-bots [23], [24] para el
o simplemente
arrastre, a continuación se
transporte de
objetos pesados y de distintos
muestran algunos
trabajos alrededor del tema.
tamaños y formas,
la plataforma estaba
Mataric et al [16]
diseño una plataforma
compuesta por 16
robots autónomos con
cooperativa
meramente reactiva aplicada al
capacidades de auto
ensamblaje llamados
transporte de una
caja larga, su enfoque utilizo
s-bots. Estos a su
vez eran capaces de
la cooperación en
tres niveles: sensado, acción
establecer una
conexión física con cada objeto
y control, para la
distribución de tareas entre
a transportar. Cada
robot era controlado
dos robots hexápodos
equipados con sensores
mediante algoritmos
evolutivos y redes
de luz y de contacto
que les permitía generar
neuronales, lo que
les permitía adaptarse a
comportamientos de
sujeción y seguimiento de
cualquier entorno
sin la necesidad de conocer
luz dependiendo del
estado de la tarea.
su posición
inicial, también les ofrecía la
ventaja de calcular
y determinar la geometría
Donalds et al [17]
desarrollo un sistema multi-
del objeto y con
esto aumentar o disminuir el
robot
descentralizado cooperativo enfocado al
número de s-bots
para transportar el objeto.
movimiento de un
grupo de cajas desordenadas,
su diseño consistía
en el desarrollo de tres
En el marco del
proyecto Swarmanoid [25], [26]
habilidades. La
primera consistía en lanzar
Decugniere et al
[27] presentó un enfoque para
una cuerda alrededor
de los objetos con la
el transporte
cooperativo de múltiples objetos
intención de
sujetarlos. La segunda radicaba en
por un sistema de
enjambre robótico con el fin
la utilización de
una cuerda floja para acomodar
de aumentar su
capacidad de carga inspirado
las cajas
internamente. Por último el sistema
por las
observaciones hechas al transporte de
tenía la capacidad
de transportar las cajas a
alimentos en
colonias de insectos. Su propuesta
acomodadas a otro
sitio asegurando su orden
radica en la
implementación de un robot que
con la
implementación de trinquetes sobre las
actúa como un
vehículo de carga masiva al que
cajas.
denomino cart-bot
en el cual se apilaba uno a
uno los objetos
para luego ser llevado por otros
14
Transporte
cooperativo de objetos con una plataforma móvil en un entorno
estructurado
Edwin Andrés
Beltrán González
robots denominados
foot-bots hasta una meta
longitud era de
0,21m por 0,018m de ancho
deseada.
(Fig. 2). Como
parte del entorno, los objetos
contaban de una
caja de 1m de longitud, una
Dorigo et al [28],
[30] retoma todo el trabajo
caja de 0,35m de
longitud y un cilindro de
realizado por Gross
y Decugniere y añade a este
1,8m de longitud.
la implementación
de algoritmos evolutivos y
redes neuronales
para la detección y prevención
de obstáculos, el
nivel de dificultad radico
en la generación de
comportamientos que le
permitieran al
robot prevenir en obstáculo y a
la vez mantener el
transporte del objeto.
3. METODOLOGÍA
Se diseño e
implemento una plataforma móvil
Fig. 2.
Fase final del
entorno estructurado.
cooperativa
aplicada al transporte de objetos
largos utilizando
las herramientas del kit Lego
3.2. Desarrollo de
la plataforma robótica
Mindstorms RCX 2.0®
[1], a continuación se
muestra el
desarrollo de la investigación.
Para el desarrollo
de la plataforma se utilizaron
3.1. Desarrollo del
entorno
las herramientas
del kit Lego Mindstorms
RCX 2.0® [1]
diseñando un par de robots
El diseño y
elaboración de un entorno conocido,
denominados maestro
y esclavo cuyas
le permitió a la
plataforma percibir su medio
características
físicas permitieron arrastrar el
eficazmente,
inicialmente fue diseñado y
objeto, de esta
manera cada robot contó con un
construido sobre
una lamina de madera de
juego de sensores característicos del kit, así en
1m² de color negro
mate a la cual se añadió una
una fase inicial,
el robot maestro contaba con
serie de franjas
blancas (Fig. 1).
un sensor de
contacto, y un par de sensores de
rotación, mientras
que para el robot esclavo
se contaba con un
sensor de contacto y un par
de sensores de luz,
el sistema de locomoción
implementado por
sus prestaciones fue el
oruga al ofrecer
mayor superficie de contacto
a la hora de
realizar el transporte del objeto
(Fig. 3).
Fig. 1.
Aspecto de la fase
inicial del entorno estructurado.
A través del
desarrollo de la investigación el
Fig. 3.
Plataforma inicial
para el transporte cooperativo.
entorno sufrió
algunos cambios que se dieron
para mejorar el
desempeño de la plataforma, de
3.2.1. Sensorica
esta manera el
entorno en donde se realizaron
las pruebas finales
constaba de una lamina de
Las exigencias de
diseño y las limitaciones del
madera de 1,5m² de
color negro mate y con
kit con el que se
implemento la plataforma
franjas blancas en
el extremo izquierdo cuya
hicieron evidente
la necesidad de hacer
15
Vol. 3 │ No. 1 │
Enero - Julio 2012
una correcta
aplicación de los sensores
1.
Ubicación inicial.
disponibles de esta
manera algunos aspectos
2.
Reconocimiento
del objeto.
como la exploración
y empuje del objeto y el
3.
Ubicación de
traslado.
mantenimiento de la
referencia en cuanto a la
4.
Transporte del
objeto.
posición fueron
criterios asumidos en cuenta
3.3.1. Ubicación
inicial
para cada uno de los
robots.
En esta fase se
definieron las posiciones de
El sensor se
rotación se basa en un encoder
partida para la
plataforma, los objetos y los
de baja resolución,
constituido por dos foto
puntos de llegada,
es importante resaltar que
transistores y un
rotor de cuatro dientes
el proyecto fue
enfocado en el transporte de
con esto se obtiene
16 pasos por vuelta, lo
objetos y no de su
búsqueda, de esta manera
que traduce 22.5
grados de precisión, su
se establecieron
estos puntos arbitrariamente.
implementación
permitió conocer la posición
del robot maestro en
cada fase del proyecto y
así determinar de la
misma manera la posición
del robot esclavo.
Con el sensor de luz el robot
esclavo se movilizo
a través de la línea mediante
la comparación del
umbral de luz tanto para el
color negro como
para el color blanco, dicha
variación permitió
diseñar un comportamiento
reactivo de seguidor
de línea (Fig. 4).
Fig. 5.
Posición inicial de
la plataforma y los objetos.
En la Fig. 5 se
muestra la posición inicial del
robot maestro, esta
se indico con una línea
amarilla vertical
localizada en la cebra, la parte
trasera del robot
se ubico de forma paralela a
la línea amarilla.
La posición inicial del robot
esclavo se
implemento de tal forma que los
sensores de luz
estuviesen situados sobre una
misma franja blanca.
3.3.2.
Reconocimiento del objeto
El enfoque para
desarrollar esta parte fue el
Fig. 4.
Umbrales de luz
obtenidos por el sensor para
de tocar,
retroceder, avanzar de forma paralela
cada color.
a objeto y volver a
tocar hasta no encontrar
el objeto, (Fig. 6)
filosofía que salvo algunos
3.3. Trabajo
cooperativo
cambios se mantuvo
hasta la finalización del
proyecto. Muchos de
los errores del proyecto
La plataforma fue
diseñada para la aplicación
se presentaron y se
solucionaron en esta parte,
de trabajo
cooperativo al movimiento de
uno de los más
frecuentes fue el de lograr que
objetos, sin embargo
durante el desarrollo del
el robot se
mantuviera en línea recta paralela al
proyecto se podían
presentar dos situaciones,
objeto, pues aun
con los sensores de rotación el
una en donde el
robot maestro solicitaba ayuda
control de este
movimiento se dificulto bastante
al robot esclavo
para mover el objeto (trabajo
debido a factores
como malas uniones entre la
cooperativo), y otra
en donde el robot maestro
piezas de la parte
de tracción de la plataforma,
trasladaba el objeto
solo (no cooperativismo).
falta de batería, y
un objeto lo suficientemente
pertinente para el
reconocimiento. Finalmente
Así, el proyecto se
dividió en cuatro fases.
después de varias
pruebas se obtuvieron en
16
Transporte
cooperativo de objetos con una plataforma móvil en un entorno
estructurado
Edwin Andrés
Beltrán González
general los
siguientes valores para el ángulo
que describía el
robot maestro tomando como
referencia un
movimiento de 90 grados.
Fig. 9.
Ubicación de
traslado establecida para el
transporte no
cooperativismo.
3.3.4. Transporte
del objeto
Una vez la
plataforma estaba ubicada, el
robot maestro se
desplazaba hacia delante
Fig. 6.
Diagrama de flujo
para la fase de reconocimiento
con velocidad
constante, comunicándole
del objeto realizado
por el robot maestro.
continuamente la
posición al robot esclavo
(Fig. 10).
3.3.3. Ubicación de
traslado
Una vez terminada
la fase de reconocimiento
del objeto, el
robot maestro determinaba si se
establecía una
situación de cooperativismo,
(Fig. 7, Fig. 8) en
este caso el robot esclavo
partía de su
posición de inicio y se ubicaba
en el extremo
opuesto al elegido por el
agente maestro de
suceder lo contrario (no
cooperativismo), el
robot maestro se ubicaba
en la parte central
del objeto y se alistaba para
trasladarlo (Fig.
9).
Fig. 7.
Ubicación de
traslado una vez establecido el
Fig. 10.
transporte
cooperativo sujetando una caja.
Diagrama de flujo
para la fase de transporte del
objeto.
3.4. Comunicación
En la primera fase
del proyecto la plataforma
presentaba tiempos
“muertos” en donde
no había ningún
tipo de interacción con el
entorno y había que
esperar para que hubiese
comunicación,
después de analizar la situación
Fig. 8.
Ubicación de
traslado una vez establecido el
se llego a la
conclusión de que había que
transporte
cooperativo sujetando un cilindro.
establecer un
algoritmo de sincronización que
17
Vol. 3 │ No. 1 │
Enero - Julio 2012
mejorara el desempeño
de la comunicación
en la plataforma.
Para llevar a cabo tal fin
se establecieron
tareas en la cuales el robot
maestro enviaba su
mensaje mientras que el
robot esclavo estaba
en modo de recepción,
cuando esto sucedía
era el maestro quien
entraba en modo de
recepción y el esclavo
enviaba su
confirmación de recibido, todo esto
dentro de un
intervalo de 500ms (Fig. 11).
Fig. 12.
Plataforma final
(robot maestro)
Fig. 13.
Plataforma final
(robot esclavo)
En la Fig. 14 se
muestra el comportamiento del
robot maestro en la
fase de reconocimiento del
objeto. La linea
recta horizontal que simboliza
la superficie del
objeto, cuyo peso era de 3Kg,
en la grafica las
variaciones por encima de
Fig. 11.
Algoritmo de
sincronización para la plataforma,
esta linea
representaron pequeños empujes
a la izquierda se
encuentra la lógica seguida por el robot
que efectuó el
robot al objeto mientras lo
maestro, a la
izquierda la lógica seguida por el robot
exploraba, por otra
parte la variaciones por
esclavo.
debajo de la linea
horizontal significaron
deficiencias del
robot para llegar a tocar
La comunicación de
los robots se realizó
el objeto. Este
comportamiento se altero
mediante enlace
infrarrojo y manejo caracteres
mediante la
implementación de algoritmos
en el rango de 0 a
255 (solo enteros), sin
de corrección de
ángulo los cuales a través de
embargo se
utilizaron siempre mensajes
sencillas
operaciones matemáticas efectuaban
diferentes a cero ya
que esta señal se podía
un control sobre el
cambio de ángulo del robot
confundir con una
señal de ruido.
disminuyendo la
potencia de los motores
cuando el ángulo
registrado superaba los 90
4. RESULTADOS
grados y de la
misma forma cuando el robot
no alcanzaba un
ángulo mínimo de giro se
Después de todo el
desarrollo del proyecto, la
aumentaba la
potencia de los motores para que
plataforma final
contaba de un robot maestro
pudiese llegar a
tocar la superficie del objeto.
(Fig. 12) y un robot
esclavo (Fig. 13), cada uno
con un dispositivo
de sujeción de objetos.
18
Transporte
cooperativo de objetos con una plataforma móvil en un entorno
estructurado
Edwin Andrés
Beltrán González
entre las líneas y
la distancia recorrida. Con
esto se conocía
exactamente la posición en
cualquier lapso de
tiempo.
Fig. 14.
Comportamiento del
robot maestro en la fase de
reconocimiento del
objeto.
Para que los robots
fueran en la misma posición
Fig. 16.
Función línea
recorrida vs distancia recorrida
al mismo tiempo se
realizó una discretización
por la plataforma.
de la posición del
robot maestro, para tal fin
se creó una tabla
en donde se compararon
las franjas blancas
pintadas sobre el fondo
Fue necesario
implementar una secuencia de
de madera negro
detectadas por los sensores
comandos que
evitara un cruce o pérdida de
de luz del robot
esclavo junto con los valores
información, lo que
permitió una adecuada
medidos por el
sensor de rotación del
robot
interacción entre la plataforma y el entorno
maestro de tal
manera que la magnitud que
estructurado
definiendo las acciones para cada
representaba la
posición del robot maestro se
uno de los robots.
La secuencia de comandos
estaba
referenciando a las franjas blancas (Fig.
se muestra en la
tabla 1, a la derecha están las
15).
tareas del robot
esclavo y a la izquierda las
tareas del robot
maestro.
Tabla 1.
Secuencia de
comandos para el establecimiento
de las acciones en
la plataforma.
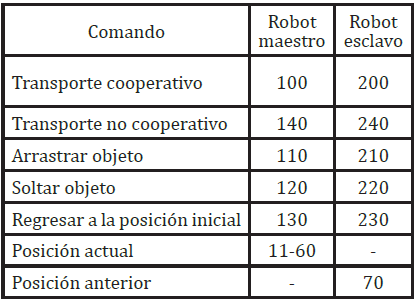
Fig. 15.
Dicretización de la
posición del maestro respecto
a las líneas
recorridas por el robot esclavo.
La relación entre
las líneas recorridas por el
robot esclavo y el
valor otorgado por el sensor
La plataforma
transporto el objeto una distancia
de rotación del
robot maestro era una relación
de un metro y
presento una velocidad constante
lineal, por lo cual
se podía determinar una
cercana a 0,14m/s,
la cual fue tomada desde el
nueva relación,
(Fig. 16) entre la distancia y las
punto inicial hasta
el punto final arrastrando
líneas recorridas
por la plataforma donde se
objetos de 3Kg de
peso (Fig. 17).
puede apreciar la
correspondencia uno a uno
19
Vol. 3 │ No. 1 │
Enero - Julio 2012
Se implemento una
plataforma multi-robot
autónoma que sirvió
para el transporte de
objetos de un punto
a otro, dotada con los
sensores y
actuadores que ofrece el kit Lego
Mindstorms RCX 2.0.
La interacción
entre los robots de la plataforma
se da de manera
centralizada, donde el robot
maestro procesaba
toda la información y su
robot esclavo
actuaba como una extensión
del primero, es
decir que los objetivos se
establecieron de
manera global y cada una de
Fig. 17.
Velocidad presentada
por la plataforma durante
las acciones de los
robots contribuyo a la meta
el transporte del
objeto.
general del
proyecto.
5. CONCLUSIONES
6. FINANCIAMIENTO
Con el desarrollo de
este proyecto continuaron
La robótica
cooperativa es una de la líneas que
las investigaciones
en el campo de la robótica
se ha venido
desarrollando dentro del grupo
cooperativa dentro
del grupo de investigación
de investigación en
Robótica Móvil Autónoma
ROMA, generando
bases para el posterior
(ROMA), esta
investigación se hizo en el
desarrollo de nuevas
aplicaciones en este
marco del proyecto
“diseño e implementación
campo como búsqueda
de objetos en un
de agentes robots,
actuando de manera
entorno desconocido,
reconocimiento de
cooperativa, en una
zona colapsada simulada,
objetos irregulares,
y trabajo cooperativo que
como apoyo a
organismos de búsqueda y
involucre un mayor
número de plataformas.
rescate urbano”.
7. AGRADECIMIENTOS
La existencia de un
entorno estructurado y
conocido facilitó el
desarrollo del proyecto en
cuanto la posición
espacial de la
plataforma.
Un Al grupo de investigación en robótica móvil
posterior desarrollo
de este proyecto podría
autónoma (ROMA) y
en particular a su director
ser en trabajo
cooperativo en entornos poco
MSc. Giovanni
Rodrigo Bermúdez Bohórquez
estructurados.
por su asesoría
técnica y constante apoyo
durante la
ejecución de la investigación.
Referencias
Bibliográficas
[1]
Pagina ofcial de
Lego Mindstorms. [En
2009 IEEE/RSJ
international conference
línea], consultado
en Junio 10 de 2011,
on Intelligent
robots and systems, pp.
disponible en: http://www.lego.com.
1-10, 2009.
[2]
K. Guadarrama, A.
López, Estrategias [4]
M. J. Wooldridge,
Intelligent Agents: in
de coordinación
para la exploración con
An introduction to
multiagent systems ed:
multi-agentes
roboticos, vol. Tesis para
John Wiley &
sons Lda, 2002, pp. 15-42.
optar al titulo de
Doctor, Universidad de
[5]
M. Wooldridge and
N. Jennings,
puebla, Mexico, pp.
14-46, 2010.
Intelligent agents:
Multiagent systems: A
[3]
A. Marjovi, J.
Nunes, L. Marques, A. de
modern approach to
distributed artifcial
Almeida,
Multi-robot exploration and fre
intelligence, The
MIT Press, 1999.
searching, IROS'09
Proceedings of the
[6]
A. Cervera,
Coordinación y control
20
Transporte
cooperativo de objetos con una plataforma móvil en un entorno
estructurado
Edwin Andrés
Beltrán González
de robots móviles
basado en agentes,
in Proc. of the
1995 IEEE/RSJ Int. Conf.
Escola Técnica
Superior d´Enginyeria
on Intelligent
Robots and Systems, vol.
Informática,
Universidad Politécnica de
3. IEEE Computer
Society Press, Los
Valencia, Valencia
España, 2011.
Alamitos, CA Los
Alamitos, CA, 1995,
[7]
G.
Acosta,
Ambiente
multiagente
pp. 556-561
robótico para la
navegación colaborativa
[17]
B. Donald, L.
Gariepy, and D. Rus,
en escenarios
estructurados, Tesis de
Distributed
manipulation of multiple
Maestría, Facultad
de Minas. Escuela
objects using
ropes, Proceedings of IEEE
de Sistemas,
Universidad Nacional de
International
Conference in Robotics and
Colombia.,
Medellín, Colombia., 2010.
Automation, vol.
1, pp. 450-457, 2000.
[8]
N. Vlassis,
Chapter II. Rational Agents:
[18]
C. Kube and E.
Bonabeaub, Cooperative
in A concise
introduction to multiagent
transport by ants
and robots, Robotics and
systems
and
distributed
artifcial
Autonomous
Systems, vol. 30, pp. 85-
intelligence,
Morgan &
Claypool
101, 2000.
Publishers, Ed.,
ed: Morgan & Claypool
[19]
C. Kube and H.
Zhang, Task modelling in
Publishers, 2007,
pp. 7-15.
collective
robotics, Autonomous robots,
[9]
N. Jennings and M.
Wooldridge,
vol. 4, pp. 53-72,
1997.
Applications of
intelligent agents: Queen
[20]
Z. D. Wang and V.
Kumar, Object closure
Mary &
Westfeld College, pp. 1-10, 1998.
and manipulation
by multiple cooperating
[10]
Y. U. Cao, A. S.
Fukunaga, and A. Kahng,
mobile robots,
2002, pp. 394-399 vol. 1.
Cooperative mobile
robotics: Antecedents
[21]
R. Gross, F.
Mondada, M. Dorigo,
and directions,
Autonomous robots, vol.
Transport of an
object by six pre-attached
4, pp. 7-27, 1997.
robots interacting
via physical links,
[11]
L. Parker, Chapter
40. Multiple Mobile
In Proc. of the
2006 IEEE Int. Conf. on
Robot Systems: in
Springer handbook of
Robotics and
Automation, ICRA 2006,
robotics, ed:
Springer-Verlag New York
IEEE Computer
Society Press, Los
Inc, 2008.
Alamitos, pp.
1317-1323, 2006.
[12]
C. Iglesias,
Defnición de una metodología
[22]
R. Gross and M.
Dorigo, Cooperative
para el desarrollo
de sistemas multiagente,
Transport of
Objects of different shapes
vol. Tesis
Doctoral, departamento de
and sizes,
presented at the ant colony
Ingenieria de
Sistemas Telematicos,
optimization and
swarm intelligence,
Universidad
Politecnica de Madrid, pp.
4th International
Workshop, ANTS
9-30, 1998.
2004, volume 3172
of Lecture Notes in
[13]
L. Iocchi, D.
Nardi, M. Piaggio, and
Computer Science,
Berlin, Germany,
A. Sgorbissa,
Distributed coordination
2004.
in heterogeneous
multi-robot systems,
[23]
F. Mondada, G.
Pettinaro, A.Guignard,
Autonomous robots,
vol. 15, pp. 155-168,
I. Kwee,
D.Floreano, J.Deneubourg,
2003.
S.Nolf, L.
Gambardella, and M. Dorigo,
[14] J. Jiménez,
M. Valencia, and J. Ochoa,
Swarm-Bot: a new
distributed robotic
Metodología para
el análisis y diseño de
concept,
Autonomous robots, pp. 17(2-
sistemas
multi-agente robóticos: MAD-
3):193-221, 2004.
Smart,
Medellin.Colombia, 2007.
[24] M. Dorigo, E.
Tuci, V. Trianni,
[15] R. Rizo, F.
Llorens, and M. Pujol,
R .Gross, S.
Nouyan, C. Ampatzis, T.
Arquitecturas y
comunicación entre
Labella, R.
O'Grady, M. Bonani, and
agentes,
Departamento de
ciencia
F. Mondada,
SWARM-BOT: Design
de la computacion
e inteligencia
and implementation
of colonies of self-
artifcial,Universidad de Alicante, pp.
assembling
robots.,\"
Computational
5-20, 2003.
Intelligence:
Principles and Practice,
[16] M. Mataric,
M. Nilsson, and K. Simsarin,
Gary Y. Yen and
David B. Fogel (eds.),
Cooperative
multi-robot box-pushing, in
IEEE Computational
Intelligence Society,
21
Vol. 3 │ No. 1 │
Enero - Julio 2012
pp. 103-135, 2006.
and Swarm
Intelligence (ANTS-2008),
[25] M. Dorigo, D.
Floreano, L. Gambardella,
Springer, Lecture
Notes in Computer
F. Mondada, S.
Nolf, T. Baaboura, M.
Science, 2008, pp.
304-311.
Birattari, M.
Bonani, M. Brambilla,
[28]
E. Ferrante, M.
Brambilla, M. Birattari,
and A. Brutschy,
Swarmanoid: a novel
and M. Dorigo,
Look out!: Socially-
concept for the
study of heterogeneous
mediated Obstacle
avoidance in collective
robotic
swarms,
Technical
Report
transport, In
Proceedings of the Seventh
TR/IRIDIA/2011-014,
IRIDIA,
International
Conference on Swarm
Université Libre
de Bruxelles, Brussels,
Intelligence (ANTS
2010), M. Dorigo and
Belgium2011.
others (editors),
Springer, vol. 6234, pp.
[26] F. Ducatelle,
G. Di Caro, and L.
572-573, 2010.
Gambardella,
Cooperative
self-
[29]
E. Ferrante, M.
Brambilla, M. Birattari,
organization in a
heterogeneous swarm
and M. Dorigo,
Socially mediated
robotic system, In
Proceedings of the
negotiation for
obstacle avoidance
Genetic and
Evolutionary Computation
in collective
transport, in In 10th
Conference
(GECCO), 2010.
International
Symposium on Distributed
[27]
A. Decugniere, B.
Poulain, A. Campo,
Autonomous
Robotics Systems, 2010, To
C. Pinciroli, B.
Tartini, M. Osée, M.
appear 2010.
Dorigo, and M.
Birattari, Enhancing the
[30]
R. Gross and M.
Dorigo, Towards group
cooperative
transport of multiple objects,
transport by
swarms of robots, Int. J. Bio-
In Proceedings of
the Sixth International
Inspired
Computation, vol. 1, p. 1, 2009.
Conference on Ant
Colony Optimization
22
Transporte
cooperativo de objetos con una plataforma móvil en un entorno
estructurado
Edwin Andrés
Beltrán González
Licencia

Reconocimiento – NoComercial – CompartirIgual (by-nc-sa): No se permite el uso comercial de la obra original, las obras derivadas deben circular con las mismas condiciones de esta licencia realizando la correcta atribución al autor.
Esta obra está bajo una licencia de Creative Commons Reconocimiento-NoComercial-CompartirIgual 4.0 Internacional










