DOI:
https://doi.org/10.14483/22487638.11564Published:
2017-02-01Issue:
Vol. 20 No. 50 (2016): October - DecemberSection:
Case studyPrototype for harmonic compensation in three phase systems
Prototipo para la compensación de armónicos en sistemas trifásicos
Keywords:
Calidad de energía, Compensación de armónicos, Control de corriente, Filtro activo, Inversor de potencia. (es).Keywords:
Active filter, Current controller, Energy quality, Harmonics compensation, Power inverter. (en).Downloads
References
Akagi, H., Kanazawa, Y., & Nabae, A. (1983). Generalized Theory of the Instantaneous Reactive Power in Three-Phase Circuits. Presentado en International Power Electronics Conference (IPEC’ 83), Tokyo, Japan.
Belonkar, A., & Salodkar, M. (2013). Performance Analysis of Shunt Active Power Filter with Different Switching Signal Generation Techniques. Presentado en Recent Advances and Applications of Electrical Engineering: Proceedings of the 9th WSEAS International Conference on Applications of Electrical Engineering (AEE ’10), Penang, Malaysia.
Cardenas, P., Jimenez, F., & Peña, C. (2009). Filtro Activo de Potencia en Paralelo: Análisis y Diseño. Revista Colombiana de Tecnologías de Avanzada, 2(14).
Dey, P., & Mekhilef, S. (2015). Current Controllers of Active Power Filter for Power Quality Improvement: A Technical Analysis. Automatika ‒ Journal for Control, Measurement, Electronics, Computing and Communications, 56(1). http://doi.org/10.7305/automatika.2015.04.572
Juhai, Z. (2012). An analysis of shunt active power filter based on instantaneous reactive power theory. En Power Electronics and Motion Control Conference (IPEMC), 2012 7th International (Vol. 4, pp. 3000-3003). http://doi.org/10.1109/IPEMC.2012.6259349
Kumar, Y., Jaykanth, N., & Borghate, V. (2014). Analysis and Simulation of Shunt Active Power Filter to Address Power Quality Problems. International Journal of Engineering Research & Technology (IJERT), 3(3), 2228-2232.
Morán, L. A., Dixon, J. W., Espinoza, J. R., & Wallace, R. R. (1999). Using Active Power Filters to Improve Power Quality. En 5th Brazilian Power Electronics Conference (pp. 501–511). Recuperado a partir de http://web.ing.puc.cl/~power/paperspdf/dixon/37a.pdf
Ramana, B. V., Chowdary, S. D., & Ratnam, G. V. (2014). Analysis of Active and Passive Power Filters For Power Quality Improvement under Different Load Conditions. International Journal of Advanced Research in Electrical, Electronics and Instrumentation Engineering, 03(08), 11102-11115. http://doi.org/10.15662/ijareeie.2014.0308035
How to Cite
APA
ACM
ACS
ABNT
Chicago
Harvard
IEEE
MLA
Turabian
Vancouver
Download Citation
doi: http://dx.doi.org/10.14483/udistrital.jour.tecnura.2016.4.a07
Prototipo para la compensación de armónicos en sistemas trifásicos
Prototype for harmonic compensation in three phase systems
Alfonso Alzate Gómez1, Duberney Murillo Yarce2, Ricardo León Silva Cárdenas3
1 Ingeniero electricista, magíster en Ingeniería Eléctrica, Universidad Tecnológica de Pereira, Pereira, Colombia. Contacto: alalzate@utp.edu.co
2 Ingeniero electricista, magíster en Ingeniería Eléctrica, Universidad Tecnológica de Pereira, Pereira, Colombia. Contacto: duberm@utp.edu.co
3 Ingeniero electricista, Servicio Nacional de Aprendizaje (SENA), Cali, Colombia. Contacto: rsilva@sena.edu.co
Fecha de recepción: 01 de abril de 2016 Fecha de aceptación: 10 de septiembre de 2016
Cómo citar: Alfonso Alzate G., A.; Murillo Y., D. y Silva C.; R.L. (2016). Prototipo para la compensación de armónicos en sistemas trifásicos. Revista Tecnura, 20(50), 96-105. doi: 10.14483/udistrital.jour.tecnura.2016.4.a07
RESUMEN
Contexto: La metodología tradicional para el control de armónicos consiste en el uso de filtros pasivos sintonizados a las componentes armónicas a eliminar. Los filtros pasivos requieren de un diseño exigente en frecuencia para evitar fenómenos de resonancia con otros elementos y no responden a cambios en la dinámica del sistema eléctrico de potencia.
Método: Una alternativa de solución de mejores características son los filtros activos de potencia paralelos. Estos filtros a diferencia de los filtros pasivos, inyectan corrientes de compensación a la red y tienen la capacidad de adaptarse a los cambios en las condiciones de operación. La implementación de un filtro activo implica desarrollo de hardware pero también desarrollo de software. Se requieren algoritmos para el cálculo de las corrientes de compensación, control de corriente y de la tensión del bus de continua.
Resultados: En este trabajo se diseña y construye un prototipo para la compensación de armónicos de 5kVA en sistemas de distribución trifásica de 220V. Los elementos fundamentales que constituyen el hardware son: bobina de acople, condensador, dispositivos semiconductores y controlador. Los algoritmos de control que se encargan de la operación del filtro activo en cada instante de tiempo son Teoría PQ, Control Lineal-PWM y control PI.
Conclusiones: Los filtros activos de potencia son una solución a la presencia de armónicos en los sistemas de potencia. Compensan los armónicos generados por las cargas, no presentan problemas de resonancia y tienen respuesta dinámica.
Palabras Clave: Calidad de energía, Compensación de armónicos, Control de corriente, Filtro activo, Inversor de potencia.
ABSTRACT
Context: The traditional methodology for the control of harmonics consists in the use of passive filters tuned to the harmonic components to be eliminated. Passive filters require a frequency-demanding design to avoid resonance phenomena with other elements and they not respond to changes in the dynamics of the electric power system.
Method: A best-performing solution alternative is parallel power active filters. These filters, unlike passive filters, inject compensation currents into the network and have adaptation to changes in operating conditions. The implementation of an active filter involves hardware development but also software development. Algorithms are required for calculation of compensation currents and dc bus voltage control.
Results: In this work a prototype for the harmonic compensation of 5kVA is designed and built in three phase distribution systems of 220V. The hardware fundamental elements are: coupling coil, capacitor, semiconductor devices and controller. The control algorithms that are responsible for the operation of the active filter at each instant of time are PQ theory, Linear Control-PWM and PI Control.
Conclusions: The active power filters are a solution to the presence of harmonics in power systems. They compensate the harmonics generated by nonlinear loads and they don‘t have resonance problems and good dynamic response.
Keywords: Active filter, Current controller, Energy quality, Harmonics compensation, Power inverter.
INTRODUCCIÓN
La metodología tradicional para el control de armónicos consiste en el uso de filtros pasivos sintonizados a las componentes armónicas a eliminar. Los filtros pasivos utilizan componentes pasivos (redes LC), que a bajas frecuencias son dispositivos grandes y de costo elevado (Martínez, 2003). Además, requieren de un diseño exigente en frecuencia para evitar fenómenos de resonancia con otros elementos y no responden a cambios en la dinámica del sistema eléctrico de potencia. Estos inconvenientes, plantean la necesidad de otras alternativas.
Como consecuencia del desarrollo tecnológico en el campo de los semiconductores y los procesadores, la electrónica de potencia ha desarrollado dispositivos que permiten mejorar la calidad de la energía. Entre ellos se encuentran los filtros activos de potencia, los cuales son equipos dinámicos diseñados para la compensación de armónicos. Estos, a diferencia de los pasivos, inyectan componentes de compensación a la red anulando el efecto de los armónicos y tienen la capacidad de ajustarse a los cambios en las condiciones de operación. Están basados en convertidores PWM (modulación por ancho de pulso) y pueden conectarse al sistema de distribución en serie o paralelo (Ramana, Chowdary y Ratnam, 2014).
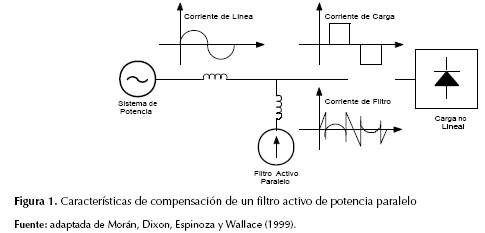
La topología utilizada en este proyecto es un filtro activo de potencia paralelo o shunt. En la figura 1, el filtro activo paralelo se representa como una fuente de corriente que inyecta en el nodo donde está conectada la carga, corrientes de compensación para cada frecuencia armónica con la misma amplitud y opuesta en fase a la de la red de alimentación, cancelando los efectos de los armónicos producidos por la carga (Kumar, Jaykanth y Borghate, 2014).
El filtro activo está constituido por cinco bloques funcionales: el convertidor de potencia, la inductancia de interconexión, el dispositivo de almacenamiento de energía, los acondicionadores de señal y el controlador (Cárdenas, Jiménez y Peña, 2009). El control del filtro activo es implementado en procesadores de alta velocidad como procesadores digitales de señal (DSP) y FPGA (Dey y Mekhilef, 2015).
La forma de onda de corriente para cancelar los armónicos se obtiene mediante el convertidor fuente de tensión controlado en corriente y el enlace de corriente, constituido por una inductancia. El convertidor usa un capacitor como fuente de voltaje de corriente continua, para poder generar las señales de compensación. La forma de onda para la señal de referencia inyectada al sistema se obtiene mediante la conmutación de los dispositivos de potencia (Juhai, 2012).
El controlador del filtro activo realiza tres acciones principales: a) generación de la corriente de referencia; b) control de corriente; c) control del bus de continua (Belonkar y Salodkar, 2013). La corriente de referencia, también llamada corriente de compensación, es la que debe inyectar el filtro activo en el punto de conexión de la carga. Para generar y controlar la corriente de compensación se debe determinar:
- Los voltajes y corrientes en el punto de conexión de la carga.
- El método de cálculo de las corrientes de compensación con base en las tensiones y corrientes medidas.
- La técnica de control de corriente que garantice corrientes de inyección equivalentes a las corrientes de compensación halladas.
Después de obtener las corrientes de compensación se generan las señales de conmutación para el puente inversor. La conmutación de los dispositivos electrónicos determina el sentido del flujo de potencia entre el filtro y la red; y permite en conjunto con el elemento de acople, sintetizar las corrientes de compensación halladas previamente. Un sistema de control en lazo cerrado conocido como técnica de control de corriente, garantiza la acción de seguimiento entre la corriente de compensación y la inyectada en el punto de conexión por el filtro activo para realizar la acción de compensación.
METODOLOGÍA
La implementación del filtro activo implica desarrollo tanto de hardware como de software. El inversor de potencia es el principal componente del prototipo. Está compuesto por los dispositivos semiconductores, redes de ayuda a la conmutación, el elemento almacenador de energía y bobina de acople (hardware). Este conjunto de elementos es responsable de compensar los armónicos en el punto de conexión y para este fin, se requiere de la implementación de algoritmos (software) para su adecuado funcionamiento. Los algoritmos de control son ejecutados por el controlador, que es responsable en todo momento del funcionamiento del sistema y requiere de información para ejecutar las acciones de control correspondientes. Por tanto, se requiere sensores y sistemas de acondicionamiento con su correspondiente fuente de alimentación.
Descripción del prototipo
El prototipo está conformado por el inversor de potencia, el elemento de enlace, el elemento almacenador de energía, circuitos de acondicionamiento y fuente de alimentación.
Inversor de potencia
El convertidor está constituido por IGBT que mediante su conmutación permiten controlar el flujo de energía entre el elemento almacenador de potencia y la red (Hidalgo, Díaz y Trujillo, 2014). Se diseñó y construyó un puente inversor de tres ramas y el correspondiente circuito de disparo (driver). El inversor consta de dos circuitos impresos: tarjeta de potencia y el driver. En la primera, se disponen los IGBT con sus conexiones de control, redes de ayuda a la conmutación, protecciones y salidas, mientras que en la segunda se localizan los componentes para activar y desactivar los IGBT. El driver tiene dos elementos básicos: un optoacoplador de alta frecuencia (6N137) y el circuito integrado IR2110 que amplifica y genera referencias independientes para cada señal de entrada.
Elemento de enlace
El puente inversor está conectado a la red mediante bobinas de acople. Se diseñó y construyó una bobina con protección de corriente de 30A, que puede entregar tres valores de reactancia según el punto de conexión.
Elemento almacenador de energía
Está formado por un banco de condensadores, circuito de precarga y dispositivos de protección. Utilizando condensadores electrolíticos de 1500uF y 550V, se ha dispuesto de un conjunto que proporciona una capacidad total de 1500uF a 1100V. Esta tensión tiene un margen de seguridad suficiente para el nivel de tensión que el bus debe mantener. Como se desea conectar el prototipo directamente a la red es necesario implementar un circuito de precarga. El elemento básico para esta función es un rectificador de estado sólido conectado a la red trifásica de alimentación mediante una protección (breaker tripolar). La salida del rectificador se conecta a una resistencia, para limitar la corriente del bus de continua. El circuito de precarga solo opera mientras se carga el banco de condensadores a un nivel de energía adecuado para realizar la compensación. Después, se desactiva el circuito de precarga, y se conecta el bus de continua con el puente inversor y la red.
Circuitos de acondicionamiento
Se construyeron tarjetas electrónicas para el acondicionamiento de las señales de voltaje y corriente. En la lectura de corriente se tiene que tener en cuenta que se requiere un aislamiento galvánico entre la parte de potencia y la parte de control. Por otro lado, se debe adecuar la señal a niveles admisibles por el conversor análogo-digital del DSP. El sensor utilizado es el modelo LA55-P de la marca LEM. Son sensores de efecto Hall que entregan a su salida una corriente proporcional a la corriente que pasa a través del núcleo. Para medir finalmente la corriente con el DSP se tiene que convertir a señal de tensión mediante una resistencia de alta precisión. El sensor de voltaje utilizado corresponde al modelo LV 25-400 de la marca LEM. Es un sensor de efecto Hall que entrega a su salida una corriente proporcional al voltaje del primario.
Fuente de alimentación
Se ha diseñado una fuente de alimentación de corriente continua con tensiones de +5V, +15V y -15V necesarias para alimentar el driver y los elementos de la realimentación del sistema. Las tarjetas de acondicionamiento de voltaje y corriente requieren de polarización dual de 15V. En cada tarjeta, se acondiciona la entrada proveniente de un sensor mediante la configuración de amplificadores operacionales (elementos activos). También, los circuitos de acondicionamiento sirven como intermediarios en la alimentación del sensor, que en ambos casos voltaje y corriente son transductores de efecto hall. El driver (manejador de disparo) es la otra tarjeta que requiere polarización. Se alimenta con 5V para polarizar el optoacoplador y con 15V para la polarización del integrado IR2110. La realimentación del sistema contempla corrientes y voltajes del sistema de alimentación, corrientes de salida del convertidor y la tensión del bus de continua. Esta información del sistema precisa del uso de sensores y de sistemas de acondicionamiento.
Controlador
El control del filtro activo es implementado usando un procesador digital de señal (DSP) de Texas Instruments de la familia C2000, específicamente la tarjeta de desarrollo eZdsp F2812 de Spectrum Digital. Dependiendo de la teoría de compensación, el DSP debe:
- Transformar coordenadas.
- Evaluar expresiones matemáticas para calcular la potencia activa o reactiva instantánea.
- Implementar filtros digitales.
La estructura del programa se basa en un algoritmo que se ejecuta cuando se produce una interrupción asignada al tiempo de muestreo. Durante esta interrupción el DSP toma muestras de las señales análogas de interés (voltajes y corrientes) y realiza los cálculos para obtener las componentes de compensación que debe inyectar el controlador en el punto de conexión para compensar el efecto de los armónicos.
El algoritmo utilizado para realizar la compensación de armónicos en la implementación fue desarrollado utilizando teoría PQ y control lineal-PWM.
Los métodos de compensación de armónicos están basados en la deducción instantánea de las señales de referencia a partir de las señales armónicamente contaminadas. Para técnicas de compensación en el dominio del tiempo, esta labor requiere de la implementación de filtros digitales. El objetivo es obtener una configuración que opere como filtro pasa-alto, que pueda ser programada en el controlador (en este caso un DSP) con un consumo mínimo de ciclos de instrucción, de buen comportamiento en frecuencia y un retardo mínimo. En la etapa de diseño se utilizó el paquete FdaTool (Filter Design & Analysis Tool) de Matlab.
El filtro pasa alto se construyó mediante la diferencia de la componente de potencia activa instantánea (p) y la salida de un filtro pasa bajo aplicado a p. Este arreglo evita una mala compensación ocasionada por el desfase introducido por el filtro pasa alto en las componentes frecuenciales que se pretenden compensar.
Algoritmos de control
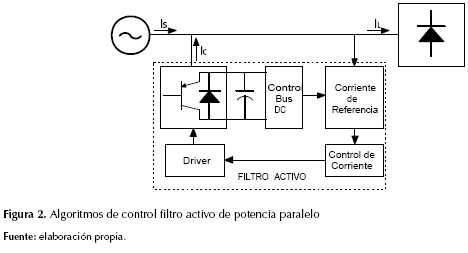
El controlador realiza tres acciones principales de control: generación de la corriente de referencia, control de corriente y control del bus de continua. En la figura 2 se detallan las acciones de control y su integración.
Las teorías de compensación son la metodología utilizada para obtener la corriente de referencia que inyectada en el punto de conexión anula los efectos armónicos en la red. La PQ es la teoría de compensación implementada en el controlador del filtro activo. Conocida en inglés como PQ Theory, Instantaneous Power Theory, Instantaneous Active and Reactive Power Method ó Instantaneous Reactive Power Algorithm, esta constituye uno de los primeros esquemas de compensación. La primera publicación en inglés es el trabajo realizado por Akagi, Kanazawa y Nabae (1983).
De acuerdo con esta teoría, las corrientes para el filtro activo se obtienen de la potencia activa y reactiva de la carga mediante cálculos previos que relacionan los voltajes y corrientes de carga en un marco de referencia estacionario aplicando la transformada αβ0, también conocida como la transformada de Clarke.
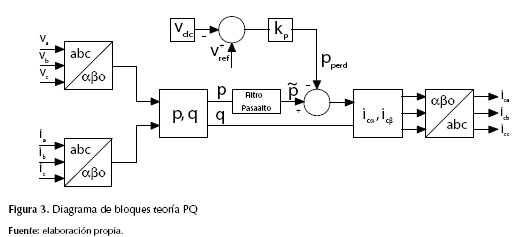
La figura 3 muestra el diagrama del método de compensación usado, incluyendo el control de la tensión de la barra de continua. El voltaje del bus de continua se regula mediante una acción de control proporcional que ejecuta el controlador para definir los intervalos de carga y descarga, y en general, controlar el intercambio de energía entre la barra de continua y la red. Cuando el controlador detecta la descarga del condensador, incrementa el valor de la corriente con el objeto de recuperar la tensión prevista en el condensador.
Un algoritmo adicional es el controlador de corriente, que tiene como función garantizar que las corrientes de compensación sigan fielmente las corrientes de referencia obtenidas mediante la estrategia de compensación de armónicos.
Una variedad de enfoques para el control de corriente se han reportado en la literatura, empleando técnicas como: PWM sinusoidal, control lineal PWM, control de corriente por banda de histéresis, control vectorial, modo deslizante, técnica dead-beat, control predictivo y en un periodo más reciente técnicas de computación suave (Dey y Mekhilef, 2015). Estas técnicas actúan sobre los dispositivos semiconductores del puente inversor modificando el patrón de conmutación (Vega y Alzate, 2015). En este trabajo se implementó la técnica control lineal-PWM, comparando la señal de error con una onda triangular de frecuencia y amplitud fijas. Si la señal de error es mayor que la onda triangular, el interruptor superior se activa y simultáneamente es desconectado el interruptor inferior. Cuando la señal de error es menor que la onda triangular el interruptor inferior se activa y simultáneamente es desconectado el interruptor superior. Puesto que este controlador utiliza una onda triangular de frecuencia fija, se mantiene constante la frecuencia de conmutación del inversor, lo que hace de esta su principal ventaja. Dicha técnica de control de corriente es un sistema de modulación de ancho de pulso: la onda triangular es la portadora, mientras que la señal de error de la corriente es la onda modulada.
Montaje del sistema
El prototipo se ha montado sobre un gabinete teniendo en cuenta las conexiones mostradas en la figura 4.
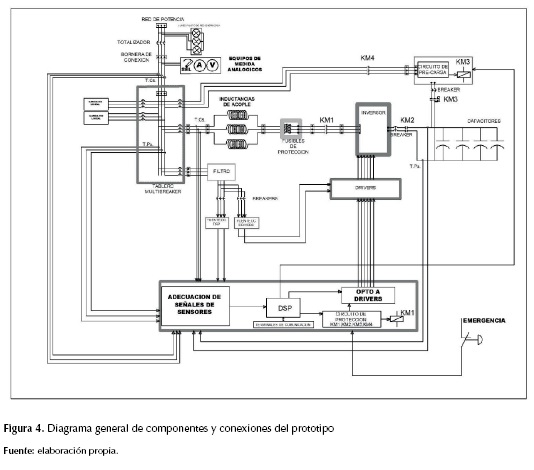
La idea principal para realizar el montaje es separar los elementos de control de los elementos de potencia, ubicando a conveniencia protecciones y sensores. También, se debe tener en cuenta aspectos como:
- Facilidad de acceso de los elementos de control para verificar tanto las señales de entrada como de salida del controlador.
- Construcción modular para poder cambiar fácilmente cualquier elemento en caso de avería.
- Apantallamiento electromagnético en la etapa de control para evitar interferencias del circuito de potencia.
- Uso de indicadores (luces piloto y medidores análogos) para supervisar el desempeño del prototipo y algunos parámetros de interés.
El montaje de los elementos de control y de potencia se ha realizado en el interior del gabinete, a lado y lado de una lámina que permite sujetar cada componente. Elementos adicionales como visualizadores, luces piloto, interfaz de comunicación del controlador, entre otros, están ubicados en el panel frontal del gabinete para una fácil inspección y acceso.
RESULTADOS
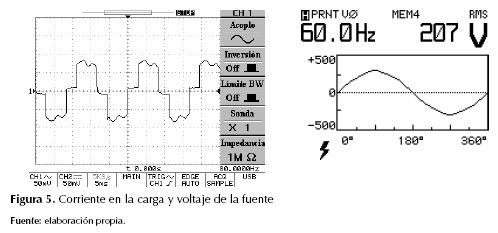
Se realizaron pruebas a 220V usando como carga un rectificador trifásico no controlado con carga RL. La estrategia de compensación de armónicos utilizada en la implementación es la teoría PQ con el control lineal PWM como técnica de control de corriente. La portadora es una señal triangular. Se muestran resultados para una fase por tratarse de una carga balanceada.
Carga RL: resistencia 330Ω e inductancia de 280mH. Valor pico de la corriente 0,5A. Bobina de acople de 11mH, relación entre las frecuencias de la moduladora y portadora 21.
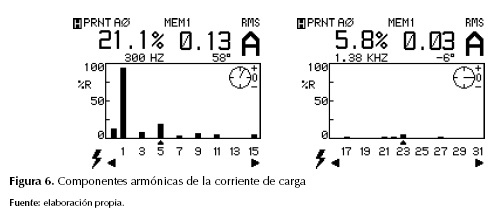
En la figura 5 se muestra la corriente de la carga y el voltaje de la fuente. En la 6, se ilustra el contenido armónico de la corriente a compensar. Se notan componentes armónicas principalmente de bajo orden, siendo el quinto armónico el más representativo, con un porcentaje del 21,1 %.
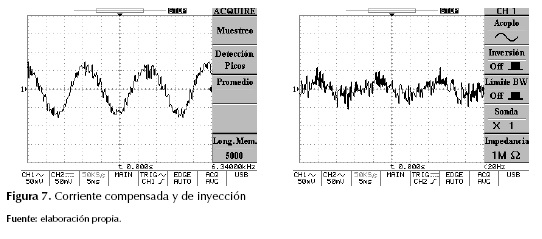
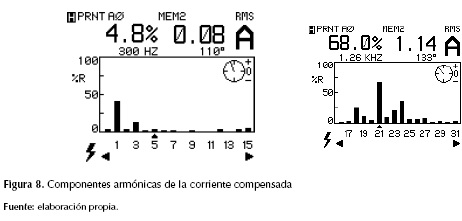
En la figura 7 se observa la corriente compensada y de inyección. Se utilizó una frecuencia de la portadora igual a 21 veces la frecuencia fundamental, obteniéndose una compensación aceptable, aunque con muchas componentes de alta frecuencia. En la figura 8, se observa una atenuación de los armónicos 5, 7, 9 y 11 pero también, una banda de frecuencias centrada en la componente 21. Este comportamiento es característico de este tipo de modulación. El quinto armónico disminuyó a un 4,8 %.
CONCLUSIONES
Se construyó un prototipo de 5KVA para la compensación de armónicos en un sistema de distribución. El prototipo puede realizar una o más de las funciones requeridas para compensar sistemas de potencia y mejorar la calidad de la energía, actuando sobre otras fuentes de problema como potencia reactiva y factor de potencia. Además, puede ser utilizado en el control de motores.
El prototipo se implementó en una red trifásica de 220V, usando como carga un rectificador trifásico no controlado con carga resistiva. Los resultados muestran una atenuación de los armónicos de bajo orden como el 5, 7 y 9; pero, generando componentes de alta frecuencia. El valor de la bobina de acople y del coeficiente de modulación en frecuencia, son determinantes en cuanto a los efectos de compensación; esto implica la elección de un valor adecuado para cada aplicación.
FINANCIAMIENTO
Universidad Tecnológica de Pereira.
REFERENCIAS BIBLIOGRÁFICAS
Akagi, H.; Kanazawa, Y. y Nabae, A. (1983). Generalized Theory of the Instantaneous Reactive Power in Three-Phase Circuits. Presentado en International Power Electronics Conference (IPEC' 83). Tokio, Japón.
Belonkar, A. y Salodkar, M. (2013). Performance Analysis of Shunt Active Power Filter with Different Switching Signal Generation Techniques. Presentado en Recent Advances and Applications of Electrical Engineering: Proceedings of the 9th WSEAS International Conference on Applications of Electrical Engineering (AEE '10). Penang, Malaysia.
Cárdenas, P.; Jiménez, F. y Peña, C. (2009). Filtro activo de potencia en paralelo: análisis y diseño. Revista Colombiana de Tecnologías de Avanzada, 2(14), 17-25.
Dey, P. y Mekhilef, S. (2015). Current Controllers of Active Power Filter for Power Quality Improvement: A Technical Analysis. Automatika ‒ Journal for Control, Measurement, Electronics, Computing and Communications, 56(1). https://doi.org/10.7305/automatika.2015.04.572.
Hidalgo, C.A.; Díaz, N.L. y Trujillo, C.L. (2014). Diseño e implementación de controladores lineales para regulación del bus DC en convertidores VSC para HVDC. Tecnura: Tecnología y Cultura Afirmando el Conocimiento, 18(40), 48-61.
Juhai, Z. (2012). An Analysis of Shunt Active Power Filter Based On Instantaneous Reactive Power Theory. En: Power Electronics and Motion Control Conference (IPEMC), 2012 7th International,4, 3000-3003. https://doi.org/10.1109/IPEMC.2012.6259349.
Kumar, Y.; Jaykanth, N. y Borghate, V. (2014). Analysis and Simulation of Shunt Active Power Filter to Address Power Quality Problems. International Journal of Engineering Research & Technology (IJERT), 3(3), 2228-2232.
Martínez, F.H. (2003). Técnicas de conversión AC/DC en sistemas monofásicos con factor de potencia unitario. Revista Tecnura, 6(12), 31-41.
Morán, L.A.; Dixon, J.W.; Espinoza, J.R. y Wallace, R.R. (1999). Using Active Power Filters to Improve Power Quality. En: 5th Brazilian Power Electronics Conference (pp. 501-511). Recuperado de: http://web.ing.puc.cl/~power/paperspdf/dixon/37a.pdf.
Ramana, B.V.; Chowdary, S.D. y Ratnam, G.V. (2014). Analysis of Active and Passive Power Filters For Power Quality Improvement under Different Load Conditions. International Journal of Advanced Research in Electrical, Electronics and Instrumentation Engineering, 03(08), 11102-11115. https://doi.org/10.15662/ijareeie.2014.0308035.
Vega, C.J. y Alzate, R. (2015). Control óptimo inverso como alternativa para la regulación de un convertidor DC-DC elevador. Tecnura, 19(46), 65-78.
License
Esta licencia permite a otros remezclar, adaptar y desarrollar su trabajo incluso con fines comerciales, siempre que le den crédito y concedan licencias para sus nuevas creaciones bajo los mismos términos. Esta licencia a menudo se compara con las licencias de software libre y de código abierto “copyleft”. Todos los trabajos nuevos basados en el tuyo tendrán la misma licencia, por lo que cualquier derivado también permitirá el uso comercial. Esta es la licencia utilizada por Wikipedia y se recomienda para materiales que se beneficiarían al incorporar contenido de Wikipedia y proyectos con licencias similares.
