
DOI:
https://doi.org/10.14483/2322939X.4699Publicado:
2013-10-15Número:
Vol. 10 Núm. 1 (2013)Sección:
Investigación y DesarrolloIMPLEMENTACIÓN DE CPG EN ROBOTS DE LOCOMOCIÓN CONTINUA Y DISCRETA
Palabras clave:
Algoritmos, diseño, lenguajes, robot, CPG (es).Descargas
Referencias
C. Gutiérrez, M. Castro, M. Marvin Minsky, “Por qué la gente piensa que los computadores no pueden”. En la Antología de. Informática y sociedad. San José: EDUCA, pp.645-680, 1987.
A. Cohens H., S. Rossignol y S. Grillner, Neural Control of Rhythmic Movements in Vertebrate. John Wiley & Sons. 1988.
J. C. Cappelletto Fuentes, Generador de modos de caminado para robot cuadrúpedo basado en principios neurofisiológicos. Tesis de maestría, Universidad Simón Bolívar. 2006.
L. A. Flores Armenta, “Red neuronal artificial. Catedrático del Instituto Tecnológico de Nogales, Área de Ing”. En Sistemas Computacionales (junio, 2008), pág 1.
J. González-Gómez , H. Zhang, E. Boemo, Locomotion Principles of 1D Topology Pitch and Pitch-Yaw-Connecting Modular Robots. Chapter 24 of the Book: Bioinspiration and Robotics: Walking and Climbing Robot, pp. 404-428. 2007.
J. González-Gómez, I. González, F. J. Gómez-Arribas y E. Boemo, “Evaluación de un Algoritmo de Locomoción de Robots Ápodos en Diferentes Procesa dores Embebidos en FPGA,” V Jornadas de Computacion Reconfigurable y Aplicaciones. JCRA 2005. Primer Congreso Español de Informática, CEDI, pp 1-8, 2005.
W. Zhao, Y. Hu y L. Wang, “Construction and Central Pattern Generator-Based Control of a Flipper-Actuated Turtle-Like Underwater Robot”, Advanced Robotics: 19-43. 2009.
OR J. “A control system for a flexible spine belly-dancing humanoid”, Artificial Life, pp 63-87. 2006.
H. Inada y K. Ishi, “A Bipedal Walk Using Central Pattern Generator (CPG)”, Brain Science and Engineering, Kyushu Institute of Technology , Available from sciencedirect, Brain-Inspired IT I. Invited papers of the 1st Meeting entitled Brain IT 2004, pp 185-188. 2004.
R. Vogelstein, F. Tenore, R. Etienne- Cummings, M. Lewis y A. Cohen, “Dynamic control of the central pattern generator for locomotion”, Biological Cybernetics: 555-566. 2006.
R. Huerta, P. Varona, M. Rabinovich y H. Abarbanel, “Topology selection by chaotic neurons of a pyloric central pattern generator”, Biological Cybernetics,
pp L1-L8, 2001.
D. Vavoulis, V. Straub, I. Kemenes, G. Kemenes, J. Feng, P. Benjamin, “Dynamic control of a central pattern generator circuit: a computational model of the snail feeding network”, The European Journal Of Neuroscience: 2805-2818. 2007.
L. Ray, A. Price, A. Streeter, D. Denton, “The Design of a Mobile Robot for Instrument Network Deployment in Antarctica, Thayer School of Engineering, Dartmouth College , U.S. Army Cold Regions Research and Engineering Laboratory, Proceedings of the 2005”, IEEE International Conference on Robotics and Automation. España. 2005.
J. B. Graham, “Prospecting Rovers for Lunar Exploration, Marshall Space Flight Center NASA”, IEEEAC paper #1579, 2007.
S. G. Lever, R. W. Nelson, D. Gaines, J. A. Herman, S. Laubach, M. Pack, S. Peters, P. Hwang, “On Low Power Operations during Spirit’s Third Winter on Mars, California Institute of Technology – NASA”, IEEEAC paper #1618, 2009.
G. M. Tina, C. Ventura, P. Arena, L. Patane, A. D. Grasso, M. Pollino, “Design considerations about a Photovoltaic Power System to Supply a Mobile Robot”, University of Catania , Industrial Electronics (ISIE), 2010 IEEE International Symposium on, 2010.
I. Heng, A. S. Zhang, A. Harb, “Using Solar Robotic Technology to Detect Lethal and Toxic Chemicals ,New York City College of Technology”, IEEE Global Humanitarian Technology Conference, 2011.
M. Raibert, M. P. Murphy, A. Saunders, C. Moreira, A. A. Rizzi, “Littledog, bostondynamics”, The International Journal of Robotics: 145-149. 2011.
Betancourt Herrera J. L., Diseño de mecanismos de palancas asistido por Computadora, Revista Ingeniería Mecánica , Habana , Vol 4, No 3, pp 35 -39, 2001.
Cómo citar
IEEE
ACM
ACS
APA
ABNT
Chicago
Harvard
MLA
Turabian
Vancouver
Descargar cita
Visitas
Descargas
IMPLEMENTACIÓN DE CPG EN ROBOTS DE LOCOMOCIÓN CONTINUA Y DISCRETA
IMPLEMENTATION OF ROBOT LOCOMOTION CPG IN CONTINUOUS AND DISCRETE
Fecha de recepción: 23 de marzo de 2013
Fecha de aprobación: 30 de abril de 2013
Édgar Mario Rico
Sena. Correo electronico: emrico@sena.edu.co
Jesús Antonio Hernández Riveros
Universidad Nacional de Colombia. Correo electrónico: jahernan@unal.edu.co.
Jaime Cardona
Sena. Correo electrónico: jcardonal@sena.edu.co
Sebastián Correa
Sena. Correo electrónico: sczapata3@misena.edu.co
Resumen
En este artículo se presentan los algoritmos desarrollados en dos tipos de robot que desarrollan movimiento continuo y discreto. Los algoritmos corresponden al método biológico de coordinación de movimientos basado en los generadores centrales de patrones (CPG) que en los últimos años se han estado introduciendo en la robótica.
Palabras clave
Algoritmos, diseño, lenguajes, robot, CPG-
Abstract
This paper presents the algorithms developed in two types of robots that develop continuous and discrete movement. The algorithms correspond to the biological method based on movement coordination central pattern generator (CPG) which in recent years have been introduced in robotics.
Keywords
Algorithms, Design, Languages, Robot, CPG
1. Introducción
La sociedad contemporánea en su afán de perfeccionar su tecnología mediante avances científicos ha venido concibiendo sistemas autónomos, como robots, cuyo objetivo es mejorar la productividad industrial y proteger la integridad del ser vivo en situaciones extremas. Preferentemente donde las funciones desempeñadas son específicas, repetitivas y predecibles. Se trata, entonces, de procesos en los cuales el control es supervisado. Sin embargo, en la robótica aún existen dificultades para poder realizar ciertas aptitudes propias de los seres vivos como el control intuitivo y la voluntariedad. Estas características avanzadas se podrán llevar a cabo en la robótica implementado aplicaciones con técnicas modernas de la inteligencia computacional [1]. Entre las técnicas de inteligencia computacional que recientemente se están empleando en la locomoción de sistemas artificiales se encuentran los generadores centrales de patrones (CPG) basado en la teoría planteada por los biólogos para explicar la locomoción de los seres vivos y que son representados matemáticamente por las redes neuronales recurrentes. El presente artículo está distribuido de la siguiente manera:
Marco teórico: se plantea la teoría sustentada por los biólogos sobre la mecánica de funcionamiento de la locomoción en los seres vivos y se explica el método de inteligencia computacional redes neuronales recurrentes que representa el modelo biológico generador central de patrones (CPG) aplicado en los sistemas artificiales.
Estado de arte: se presentan diversos trabajos enfocados a su sistema de control desarrollados en robótica móvil y robótica articulada en los últimos diez años.
Locomoción discreta: se describe el diseño e implementación de un robot cuadrúpedo de tres articulaciones por pata enfocándose en su sistema de control
Locomoción continua: se describe el diseño e implementación de un robot móvil de tres ruedas explicando especialmente su sistema de control.
Alcance: se presentan la proyección de posibles trabajos en robótica móvil y robótica articulado asociado a los generadores centrales de patrones.
2. Marco teórico
Los biólogos, entre ellos A. H. Cohen, S. Rossignol, y S. Grillner [2] han realizado diversos estudios sobre el comportamiento de los seres vivos en términos de procesos rítmicos como la respiración, la digestión, la locomoción, el sistema cardiovascular, entre otros. Encontrándose ciertas características comunes a partir de las cuales se propusieron, en su momento, como explicación del funcionamiento de dichos procesos los generadores centrales de patrones (CPG). Se define como CPG a un circuito capaz de producir patrones motores rítmicos sin necesidad de una señal externa, ya sea una entrada sensorial o una señal proveniente del control. Es decir, un CPG está presente cuando al ejecutar una orden no se depende del cerebro central del animal, aunque las señales producidas por éste alteren los patrones motores producidos por el CPG [3].
Es así como diversos grupos de investigadores han propuesto la existencia de diferentes CPG para cada uno de los eventos motores señalados. Además, se plantea que la medula espinal contiene CPG unitarios denominados generadores espinales de movimientos (GEM). También se propone que el GEM de una extremidad puede fraccionarse en subunidades funcionales más pequeñas (sub GEM) que controlarían por separado el movimiento de cada una de las articulaciones de la extremidad. Por lo tanto, los estudios de Grillner han permitido establecer la existencia de circuitos neuronales en la medula espinal que generen la locomoción en los vertebrados.
El desarrollo de la robótica móvil se viene realizando con base en los conceptos biológicos, para lo cual se emplean redes neuronales artificiales que imitan los modelos matemáticos de los CPG. Dichas redes neuronales no se basan en el conocimiento de las posiciones de ciertos puntos en el espacio, sino que actúan directamente sobre las articulaciones.
Las redes neuronales artificiales (RNA) son un método de aprendizaje y procesamiento automático, su función es imitar las propiedades observadas en los sistemas neuronales biológicos por medio de modelos matemáticos. En esencia, son sistemas de interconexión de neuronas en una red que colabora para producir un estímulo de salida, con el fin de realizar la acción deseada. Además una de las ventajas de las RNA es adaptarse al funcionamiento de una planta o sistema cuyo modelamiento matemático no existe o es complejo de procesar.
Biológicamente, un cerebro aprende mediante la reorganización de las conexiones de sus neuronas y sus estímulos, lo cual se aplica en las RNA mediante un gran número de procesadores virtuales interconectados, que de forma simplificada simulan la funcionalidad de las neuronas biológicas. El comportamiento de la sinapsis en la neurona es modelada en las RNA mediante un mecanismo de pesos, que son ajustados durante la fase de aprendizaje, lo que permite el entrenamiento de una RNA que trae como consecuencia que el conjunto de los pesos determine el conocimiento que dicha RNA posee para resolver el problema planteado. Por este motivo son de respuesta rápida y requieren, en general, de menor potencia de cálculo [4].
Este artículo presenta el desarrollo de CPG programados como redes neuronales recurrentes para coordinar el movimiento de robots con movimientos discreto y continuo. El diseño con CPG es modular de forma natural. También son menos exigentes en programación de software. Su gran dificultad está en la consecución de las ecuaciones diferenciales que rigen las oscilaciones del movimiento. En la siguiente parte de este artículo se encuentra una revisión de literatura sobre robótica móvil y aplicaciones de CPG. Sigue la presentación de resultados tanto en locomoción continua y discreta, una discusión sobre la potencialidad del enfoque con CPG y se termina con unas conclusiones.
3. Estado del arte
En la última década se han desarrollado múltiples robot articulados en diferentes universidades con técnicas de control inspiradas en los procesos biológicos de locomoción de los seres vivos, que se presentan a continuación.
El grupo de robótica bioinspirada del EFPL (Ecole Polytechnique Fédérale de Lausanne) ha desarrollado el robot anfibio Amphibot, que es capaz de moverse por agua y tierra. Está compuesto de ocho módulos que se mueven paralelamente al suelo y utiliza modelos de control bioinspirados para la locomoción, basados en los modelos de CPG (Central Pattern Generators) de la lamprea, desarrollados por Ijspeert [5].
El primer prototipo, Amphibot-I podía nadar mediante ondulaciones de su cuerpo, así como desplazarse por tierra como las serpientes, para lo cual incluía unas ruedas pasivas situadas en la panza. En la segunda versión, AmphiBot II, los módulos se hicieron más compactos, combinando los movimientos corporales con las patas. Para el modelo de control utilizan los modelos de los CPG de la lamprea y muestran cómo se puede ajustar fácilmente la velocidad y dirección del movimiento tanto en el movimiento en tierra como en agua [6].
En el colegio de ingeniería de la universidad de Pekín se ha desarrollado un robot tortuga conformado por cuatro aletas mecánicas que pueden maniobrar en cualquier dirección sin rotación de su cuerpo principal ejecutando movimientos complicados tridimensionales para lo cual se implementó una arquitectura de control basado en CPG con un sistema de osciladores no lineales [7].
En el instituto de robótica de la Universidad de Waseda se desarrolló un estudio sobre robot humanoides enfocándose a la simulación del baile del vientre utilizando CPG de la lamprea obteniéndose resultados interesantes en movimientos complejos del tronco [8].
En el instituto de tecnología de Kyushu se ha trabajado en la locomoción de un robot bípedo utilizando generadores centrales de patrones que consisten en una red basada en el Modelo de neurona Matsuoka y los parámetros que ingresan a la red son optimizados por algoritmos genéticos [9].
En la universidad de Baltimore se realizaron dos experimentos de carácter biológico y eléctrico con la idea de que la locomoción pueda ser controlada por medio de una retroalimentación bucle para supervisar la actividad de CPG y la aplicación de estímulos en el momento adecuado para modular los movimientos de locomoción que podría desarrollar un dispositivo de neuroprosthetic para la restauración de la locomoción después de una parálisis [10]
En la Universidad Autónoma de Madrid, conjuntamente con la Universidad de California, realizaron un estudio en seres invertebrados sobre el funcionamiento de CPG encontrando en las señales oscilaciones caóticas y además se dedicaron a analizar la topología de la red y su proceso para la generación de sinapsis [11].
En la Universidad de Sussex se realizó un estudio para desarrollar un modelo computacional que simulara el CPG del sistema de alimentación del caracol de laguna teniendo en cuenta las propiedades dinámicas del circuito de alimentación. El modelo también predijo nuevos efectos de la estimulación eléctrica de dos inter neuronas CPG similares a la respuesta del sistema biológico [12]. Al mismo tiempo se hizo una exploración de trabajos publicados en la última década que sirviera como referencia para el desarrollo de proyectos de robot móviles:
La Thayer School of Engineering, Dartmouth College y la armada de Estados Unidos hicieron un trabajo denominado “The Design of a Mobile Robot for Instrument Network Deployment in Antarctica” en el cual se describe el diseño y la fabricación de un robot móvil de bajo costo para apoyar misiones científicas en la meseta antártica durante el verano austral [13].
La NASA realiza una publicación denominada “Prospecting Rovers for Lunar Exploration” en la cual se hace un estudio sobre las múltiples configuraciones de vehículos robóticos basados en los mecanismos tipo rover (tracción en llantas) que puedan ser instalados en la luna, que permitan su autonomía para exploración aprovechando los depósitos de agua y luz exterior como fuentes de energía[14].
La NASA y el Instituto de Tecnología de California publicaron un trabajo denominado “On Low Power Operations during Spirit’s Third Winter on Mars” en el que hacen una descripción de las operaciones realizadas por los robot Spirit y Opportunity desde que aterrizaron en Marte [15]. En la Universidad de Catania realizaron un proyecto cuya publicación se denominó “Design considerations about a Photovoltaic Power System to Supply a Mobile Robot” que presenta el diseño de un sistema de fuente de alimentación a base de células solares de un robot autónomo controlado con un micro controlador denominado Tribot [16].
En New York City College of Technology se presenta un trabajo denominado “Using Solar Robotic Technology to Detect Lethal and Toxic Chemicals”. Se plantea una perspectiva en diseño y construcción de un brazo tele-operado y robot autónomo no tripulado que puede detectar gases químicos nocivos y letales en el suelo [17].
Por lo tanto, en la revisión de literatura se encontró información relacionada con el manejo adecuado de energías alternativas (celdas solares) que proporcionan mayor autonomía. Sin embargo, no se encontró la implementación de técnicas biológicas como CPG en el control y operación de robots móviles. En cuanto a robots articulados se observó que existen algunos trabajos relacionados con la técnica de CPG. No obstante, en cuadrúpedos con tres articulaciones la información es escasa. Todo lo anteriormente presentado fue revisadomediante las bases de datos de IEEEXplore.
En este artículo se presentan los resultados de un proyecto cuyo objetivo es aplicar los CPG a Robots con movimientos discreto (cuatro patas cada una con tres articulaciones) y continuo (tres ruedas).
4. Locomoción discreta
4.1 Robot articulado
En la planificación del proyecto se definió una serie de pasos que seguir para poder cumplir con el objetivo de diseñar e implementar un robot articulado con gran suficiencia en el modo de caminar. Por lo tanto, se ha hecho un análisis de las diferentes estructuras llegando a definir la configuración más pertinente para su diseño teniendo en cuenta la elección de los actuadores y la sensorica más versátiles y con mayor potencia. Finalmente se hizo una búsqueda de información sobre los algoritmos con mejores prestaciones para utilizar en la robótica articulada. Se opta por diseñar un algoritmo propio basado en CPG.
4.2 Estructura
Se diseña una estructura que permite tener un variado número de rutinas de movimiento, pues la idea es que sea lo suficientemente versátil en cuanto a movimientos para así poder responder a las decisiones tomadas por el control.
Durante el diseño de los elementos mecánicos que se realizó mediante CAD (diseño asistido por computador) se presentaron muchos problemas relacionados con las características de los movimientos. En nuestro caso se hace un análisis de diferentes prototipos tomando como base el Littledog [18] y la experimentación mediante la simulación; de esta manera se logra un buen sistema para el acople de las articulaciones [19]. Estas se diseñan de forma que se obtenga la mayor fluidez de movimiento y un gran número de articulaciones (figura 1), teniendo en cuenta el peso, los esfuerzos concentrados en los puntos críticos, entre otros.
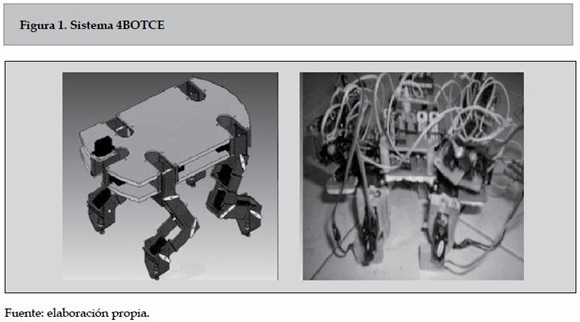
Además, se definió que los actuadores fueran servomotores debido a que los movimientos deben ser precisos y rápidos en el momento que se requiera realizar de manera coordinada y con apreciable torque, por lo tanto, estos elementos son los ideales para realizar actividades de robótica articulada.
4. 3 Análisis estático del robot
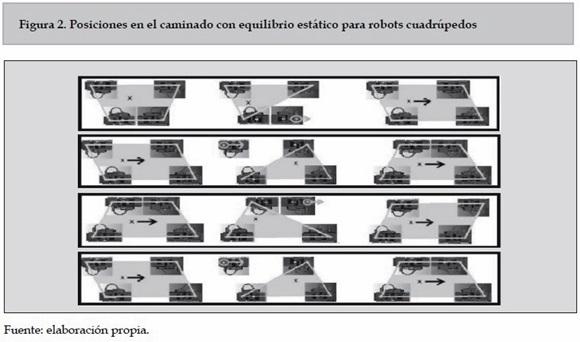
Para comenzar a plantear el modo de caminar del robot cuadrúpedo es importante determinar las posiciones en las cuales se encuentra en equilibrio. Por lo tanto es importante entender que la secuencia de pasos del robot debe ser de tal forma que la proyección de la fuerza de gravedad sobre el robot se debe encontrar en el interior del polígono formado por los apoyos. De esta manera, las fuerzas que ejerce el peso sobre cada una de las extremidades apuntan todas hacia el interior de la plataforma siendo anuladas por las componentes normales en los puntos de apoyo, pues de lo contrario el robot perdería el equilibrio (ver figura 2).
4. 4 Generación de patrones
Después de hacer un estudio de las diferentes estructuras existentes para el desarrollo de CPG se inició su análisis con un esquema sencillo conformado por dos neuronas principales realimentadas, conectadas lateralmente con dos neuronas y dos neuronas en su capa interna (ver figura 3).
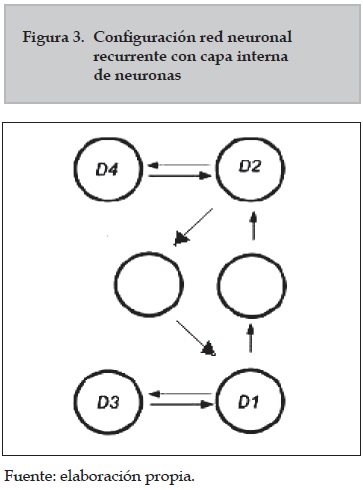
La idea en principio es hacer una exploración de las diferentes configuraciones básicas para determinar a futuro la manera de implementar el algoritmo en la plataforma articulada. Se ha escogido la configuración de la figura 3 que presenta una respuesta oscilatoria, que dependiendo de la estructura de programación y comunicación podría manejar una articulación o un miembro del robot para poder desarrollar un determinado modo de caminar.
La ventaja de usar CPG es la modularidad e independencia de un único cerebro centralizador. Se programa un solo CPG y se aplica a cada articulación con el desfase correspondiente a cada pata. Las ecuaciones que describen la red recurrente del CPG, son:
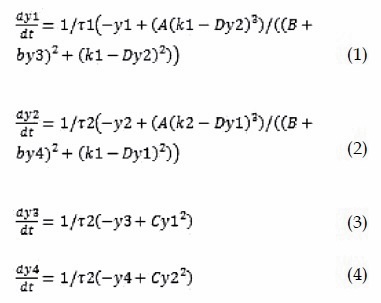
Las ecuaciones diferenciales anteriormente descritas conforman el modelo matemático de una red neuronal recurrente en tiempo real, que se soluciona mediante el método de Euler con un paso de 0.1. Cuyo comportamiento oscilatorio de las variables y1 y y2 que corresponden a las neuronas D1 y D2 se grafica a continuación (ver figura 4).
El gráfico de la figura 4 se presenta en estado estable con entrada externa a la red neuronal nula que corresponde al momento en que la red actúa con autonomía en el proceso que esta activando.

5. Locomoción continua
5. 1 Robot con ruedas
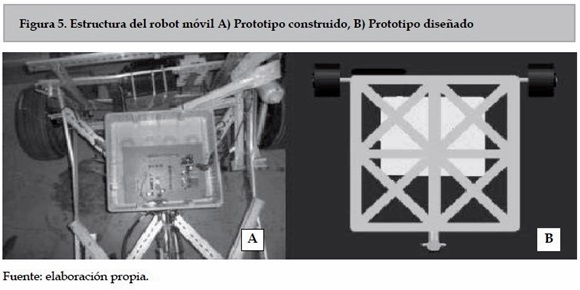
El diseño y la construcción modular con CPG de las diferentes partes del sistema (electrónica, mecánica y programación) permiten una gran flexibilidad en el montaje, el control, la supervisión, el desmontaje, la reparación y la adecuación de posibles avances o mejoramientos de estas; dichos procedimientos se iniciaron a partir del diseño (figura 5), de una manera mucho más rápida y segura, debido que al estar descentralizadas del sistema principal permiten una manipulación de cada módulo. De igual manera en caso de presentarse una falla, esta se puede manipular fácilmente con la seguridad de que el resto de los componentes no se vean afectados.
El sistema robótico móvil desde su diseño (figura 6) tuvo ciertos inconvenientes tanto en la simulación de algoritmos y estructura como en el funcionamiento del dispositivo de control en el robot que se bloquea continuamente. Luego de un exhaustivo análisis se corrigieron las simulación mejorando la lógica planteada y se corrigió el funcionamiento del control del robot implementando opto-acopladores en las salidas del microcontrolador que aislaron el sistema de potencia que maneja el motor de avance de los sensores y el dispositivo de control.

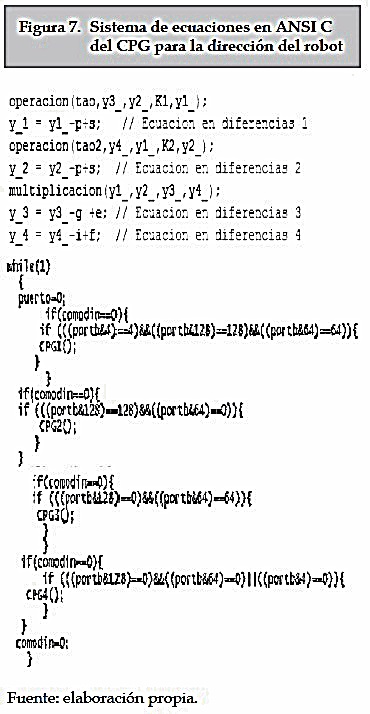
En la programación del robot se plantearon mecanismos de control inspirados en los procesos biológicos como CPG, que permiten simplificar movimientos de gran complejidad reduciéndolos a pequeñas tareas que pueden ejecutarse en paralelo por varios procesadores sin perder sincronía en sus movimientos y que representan la acción original. La semilla desarrollada en Matlab se aprecia en la figura 7).
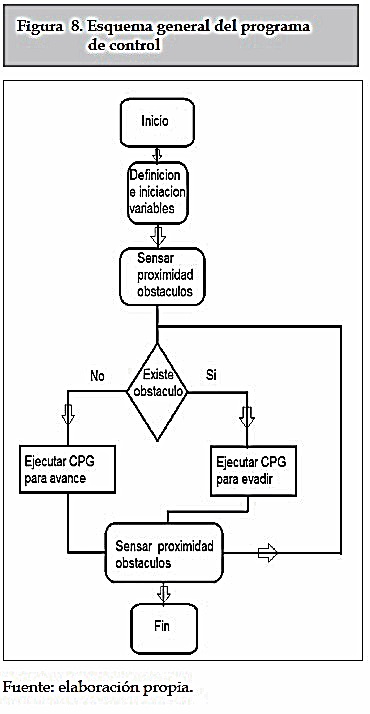
El programa se optimizó lo suficiente, de manera que el código se adecuara al tamaño de memoria del micro controlador para poderse implementar (figura 8). Cabe anotar que el tipo de variable y las operaciones previstas son de gran complejidad ya que se trata de variables de punto flotante con múltiples operaciones de multiplicación y división en sistemas de cuatro ecuaciones en diferencias con cuatro incógnitas.
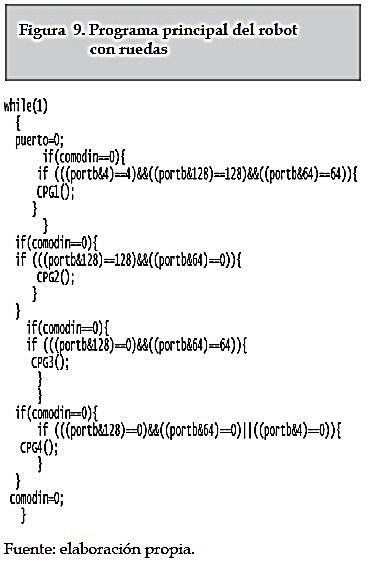
El código del programa en el dispositivo de control se basó en el lenguaje de programación de alto nivel ANSI C , el cual partió del programa desarrollado en matlab y que se optimizó mediante funciones teniendo en cuenta que la memoria del micro controlador posee una capacidad limitada (ver figura 9).
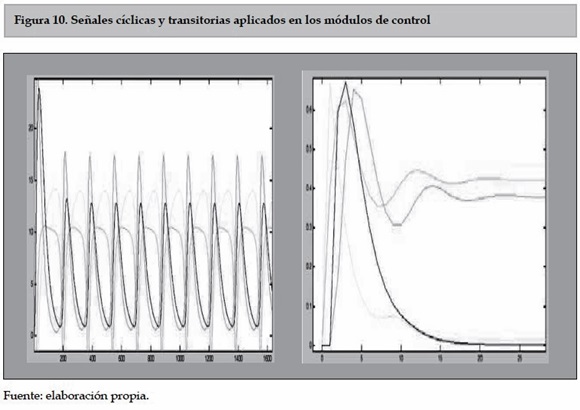
En el robot se implementaron tres dispositivos de control distribuidos de la siguiente forma: un micro controlador para la dirección, un micro controlador para el avance y un micro controlador para la sincronización. Cada uno tiene incorporado una red neuronal recurrente de cuatro neuronas (CPG) que permite realizar cuatro acciones distintas, tales como en caso de no existir obstáculo avanzar hacia adelante, en caso de existir obstáculo avanzar adelante y a la derecha ó retroceder a la derecha ó retroceder a la izquierda o retroceder. Estas cuatro acciones son sincronizadas y dependen de la información de los cuatro sensores. Es decir, que la acción a desarrollar se hace desde el micro controlador que maneja el respectivo actuador (avance, dirección), el tipo de acción se realiza por el micro controlador sincronizador y depende de los sensores. Las ecuaciones antes mencionadas que representan los CPG, inicialmente fueron simuladas en Matlab para reproducir señales cíclicas y transitorios imitando la esencia de las señales biológicas encontradas en los seres vivos (ver figura 10).
5. 2. Alcance
El proyecto ha evolucionado a través de los dos prototipos tanto en la mecánica como en la electrónica, de tal forma que ha permitido tener avances significativos que permiten tener la experiencia de implementar robots no tripulados de mayor envergadura y sistemas de transporte terrestre automáticos ecológicos e impulsados con energías alternativas.
Los sistemas robóticos planteados tanto en movimiento continuo como articulado poseen sensores de proximidad por infrarrojo que permiten conjuntamente con los algoritmos implementados una gran estabilidad y autonomía en sus acciones. Cuentan con una autonomía de tiempo que permitirá a futuro ofrecer información con claridad en su labor de realizar operaciones de telemetría para lo cual también se van a implementar mecanismos de medición de las distancias recorridas por el robot mediante encoders.
6. Conclusiones
La robótica en los últimos años ha evolucionado gracias a las nuevas técnicas de inteligencia computacional inspiradas en la biología de los seres vivos que poco a poco vienen cambiando la concepción de los sistemas articulados.
La técnica CPG ha sido propuesta como un método efectivo para proporcionarle a la robótica la versatilidad y el bajo procesamiento de computación para el desarrollo de movimientos sincronizados y complejos en rutinas como la caminata, la respiración, el vuelo, la masticación, entre otros.
El desarrollo de plataformas articuladas y móviles que posean un diseño práctico y robusto permite que sean utilizadas en ambientes difíciles con una alta probabilidad de que se pueda cumplir a cabalidad con su función de exploración.
En el desarrollo de algoritmos biológicos como CPG aplicados en la robótica se han venido implementando en los últimos diez años en robot articulados aunque no se tienen trabajos relacionados en la robótica móvil.
Se ha demostrado que el enfoque de coordinación de movimientos por medio de CPG es más económico y adecuado que la programación secuencial. Este enfoque es ventajoso sin importar la forma del movimiento. Se programaron para el desplazamiento dos sistemas robóticos con técnicas de control biológico CPG comportándose eficientemente, de manera que cumplen a cabalidad su función de locomoción tanto continua como articulada.
7. Referencias
[1] C. Gutiérrez, M. Castro, M. Marvin Minsky, “Por qué la gente piensa que los computadores no pueden”. En la Antología de. Informática y sociedad. San José: EDUCA, pp.645-680, 1987.
[2] A. Cohens H., S. Rossignol y S. Grillner, Neural Control of Rhythmic Movements in Vertebrate. John Wiley & Sons. 1988.
[3] J. C. Cappelletto Fuentes, Generador de modos de caminado para robot cuadrúpedo basado en principios neurofisiológicos. Tesis de maestría, Universidad Simón Bolívar. 2006.
[4] L. A. Flores Armenta, “Red neuronal artificial. Catedrático del Instituto Tecnológico de Nogales, Área de Ing”. En Sistemas Computacionales (junio, 2008), pág 1.
[5] J. González-Gómez , H. Zhang, E. Boemo, Locomotion Principles of 1D Topology Pitch and Pitch-Yaw-Connecting Modular Robots. Chapter 24 of the Book: Bioinspiration and Robotics: Walking and Climbing Robot, pp. 404-428. 2007.
[6] J. González-Gómez, I. González, F. J. Gómez-Arribas y E. Boemo, “Evaluación de un Algoritmo de Locomoción de Robots Ápodos en Diferentes Procesadores Embebidos en FPGA,” V Jornadas de Computacion Reconfigurable y Aplicaciones. JCRA 2005. Primer Congreso Español de Informática, CEDI, pp 1-8, 2005.
[7] W. Zhao, Y. Hu y L. Wang, “Construction and Central Pattern Generator-Based Control of a Flipper-Actuated Turtle- Like Underwater Robot”, Advanced Robotics: 19-43. 2009.
[8] OR J. “A control system for a flexible spine belly-dancing humanoid”, Artificial Life, pp 63-87. 2006.
[9] H. Inada y K. Ishi, “A Bipedal Walk Using Central Pattern Generator (CPG)”, Brain Science and Engineering, Kyushu Institute of Technology, Available from sciencedirect, Brain-Inspired IT I. Invited papers of the 1st Meeting entitled Brain IT 2004, pp 185-188. 2004.
[10] R. Vogelstein, F. Tenore, R. Etienne- Cummings, M. Lewis y A. Cohen, “Dynamic control of the central pattern generator for locomotion”, Biological Cybernetics:555-566. 2006.
[11] R. Huerta, P. Varona, M. Rabinovich y H. Abarbanel, “Topology selection by chaotic neurons of a pyloric central pattern generator”, Biological Cybernetics, pp L1-L8, 2001.
[12] D. Vavoulis, V. Straub, I. Kemenes, G. Kemenes, J. Feng, P. Benjamin, “Dynamic control of a central pattern generator circuit: a computational model of the snail feeding network”, The European Journal Of Neuroscience: 2805-2818. 2007.
[13] L. Ray, A. Price, A. Streeter, D. Denton, “The Design of a Mobile Robot for Instrument Network Deployment in Antarctica, Thayer School of Engineering, Dartmouth College , U.S. Army Cold Regions Research and Engineering Laboratory, Proceedings of the 2005”, IEEE International Conference on Robotics and Automation. España. 2005.
[14] J. B. Graham, “Prospecting Rovers for Lunar Exploration, Marshall Space Flight Center NASA”, IEEEAC paper #1579, 2007.
[15] S. G. Lever, R. W. Nelson, D. Gaines, J. A. Herman, S. Laubach, M. Pack, S. Peters, P. Hwang, “On Low Power Operations during Spirit’s Third Winter on Mars, California Institute of Technology– NASA”, IEEEAC paper #1618, 2009.
[16] G. M. Tina, C. Ventura, P. Arena, L. Patane, A. D. Grasso, M. Pollino, “Design considerations about a Photovoltaic Power System to Supply a Mobile Robot”, University of Catania , Industrial Electronics (ISIE), 2010 IEEE International Symposium on, 2010.
[17] I. Heng, A. S. Zhang, A. Harb, “Using Solar Robotic Technology to Detect Lethal and Toxic Chemicals ,New York City College of Technology”, IEEE Global Humanitarian Technology Conference, 2011.
[18] M. Raibert, M. P. Murphy, A. Saunders, C. Moreira, A. A. Rizzi, “Littledog, bostondynamics”, The International Journal of Robotics: 145-149. 2011.
[19] Betancourt Herrera J. L., Diseño de mecanismos de palancas asistido por Computadora, Revista Ingeniería Mecánica , Habana, Vol 4, No 3, pp 35 -39, 2001.
2.png)

