
DOI:
https://doi.org/10.14483/2322939X.4706Publicado:
2013-10-15Número:
Vol. 10 Núm. 1 (2013)Sección:
Investigación y DesarrolloSIMULACIÓN DEL COMPORTAMIENTO DE CAZA ENTRE UN DEPREDADOR Y UNA PRESA IMPLEMENTADO CON PLATAFORMAS LEGO NXT
Palabras clave:
Robótica bioinspirada, depredador, presa, LEGO MINDSTORMS (es).Descargas
Referencias
C. Caso, A. López-González, “Pantera Onca lista roja de especies amenazadas de la UICN,” núm. 1. enero de 2013.
E. Sanderson, K. Redford, C. Chekiewicz, R. Medellin, A Rowinowitz, J. Robinson and A. Taber, Planning to save a species the jaguar as a model. Wildlife conservation society. Universidad Autónoma de México. 2001. 58-72p. [En línea] disponible en http://www.jaguarresearchcenter.com/The_jaguar.pdf. Extraído el 17 de enero de 2013.
W. Baker and L. Rock, “Jaguar species survival plan. Guidelines for Captive Management of Jaguars”. Natural History & Behavior: 8-16. [En línea] disponible en http://www.jaguarssp.com/Animal% 20Mgmt/JAGUA R%20GUIDELINES. Pdf Enero 2013.
K. Nowell, P. Jackson, Wild Cats. Gland, Suiza: Status Survey and Conservation Action Plan - IUCN/SSC Cat Specialist Group. pp. 118-122. 1996. [En línea] disponible en http://carnivoractionplans1.free.fr/wildcats.pdf. [17 de enero de 2013].
B, Leith, (Discovery Channel, “La guía máxima: Grandes felinos.”) David Hickman film LTD. Scorer associates. Documental.
J. Pisarowicz, “American Elk – Cervus elephus,” National Park Service.
M. Silva, “Construcción y Programación de un Grupo de Robots Móviles sobre la base del Producto Lego Mindstorms NXT,” Escuela politécnica nacional, p.214, 2011
HiTechnic, HT. HiTechnic NXT IRSeeker V2 Sensor for LEGO Mindstorms NXT. [En línea] disponible en http://www.hitechnic.com/cgibin/commerce.cgi?preadd=action&key=NSK1042. [4 de febrero de 2013].
Cómo citar
IEEE
ACM
ACS
APA
ABNT
Chicago
Harvard
MLA
Turabian
Vancouver
Descargar cita
Visitas
Descargas
SIMULACIÓN DEL COMPORTAMIENTO DE CAZA ENTRE UN DEPREDADOR Y UNA PRESA IMPLEMENTADO CON PLATAFORMAS LEGO NXT
SIMULATING HUNTING BEHAVIOR BETWEEN PREDATOR AND PREY LEGO NXT PLATFORMS IMPLEMENTED
Fecha de recepción: 11 de marzo de 2013
Fecha de aprobación: 30 de abril de 2013
Kristel Solange Novoa Roldan
Universidad Distrital Francisco José de Caldas Grupo de investigación en Robótica Móvil Autónoma Bogotá, Colombia ksnovoar@udistrital.edu.co.
Héctor Tangarife Escobar
Universidad Distrital Francisco José de Caldas Grupo de investigación en Robótica Móvil Autónoma Bogotá, Colombia hetangarifee@correo.udistrital.edu.co
Rhonier Machado Mosquera
Universidad Distrital Francisco José de Caldas Grupo de investigación en Robótica Móvil Autónoma Bogotá, Colombia remachadom@correo.udistrital.edu.co
Resumen
La robótica bioinspirada toma la naturaleza como fuente e intenta imitarla; a continuación se muestra la simulación de un escenario en cual interactúan un cazador y su presa en un entorno natural de pradera, de él se extrae el comportamiento de los individuos y se implementa sobre plataformas móviles tipo lego, igualmente algunas características del ambiente natural son fuente de inspiración para el entorno artificial. En el siguiente artículo se presenta el proceso la implementación de un sistema que imita el comportamiento de caza de un depredador, representado por un felino (jaguar), cuyo objetivo es buscar su presa, que deambula un entorno controlado y es representada por un ciervo.
El sistema se simula con plataformas robóticas tipo LEGO® NXT 2.0 y el software que se desarrolla para el control de las mismas, se implementa con LabVIEW de National Instrument.
Palabras clave
Robótica bioinspirada, depredador, presa, LEGO MINDSTORMS.
1. Introducción
El proyecto se fundamenta en la construcción de dos plataformas móviles que simulan el comportamiento de supervivencia de un jaguar que representa un cazador y un ciervo que representa la presa, específicamente en los procesos de caza y huida, teniendo en cuenta las diferentes posibilidades que se pueden presentar; el cazador ve a la presa y esta no ve el felino, los dos se divisan, o la presa ve al cazador y este no ve a la presa, cada una de estas situaciones representa un comportamiento que se simula en un entorno artificial controlado que posee obstáculos que se deben evadir. Se ejecutan decisiones que se basan en la información adquirida mediante sensores de color, luz, ultrasonido, entre otros, haciendo uso de dos plataformas robóticas tipo LEGO, que son programadas en LabVIEW software de entorno gráfico, como aporte en la investigación y desarrollo de plataformas bioinspiradas para aplicaciones posteriores en comportamientos colectivos de cazadores o presas, siendo esto último, la etapa preliminar para realizar aplicaciones dirigidas a la sociedad con fines cooperativos entre plataformas móviles para búsqueda y rescate de víctimas en catástrofes o evasión de peligros después de haber sido hallados, como las minas.
2. Comportamientos
2.1 Ecología y comportamiento del jaguar
El jaguar es un carnívoro félido que se encuentra en América [1]. Su hábitat es variado puede acomodarse a selvas densas y húmedas, terrenos boscosos o abiertos; está asociado a la presencia de agua, es un cazador solitario, solo se encuentran para los cortejos, tiende emboscadas y es oportunista a la hora de elegir sus presas. Esto es, escoge las más débiles, jóvenes o aisladas del grupo [2], los adultos por lo general establecen un amplio territorio y lo defienden [3], es cazador nocturno, pero puede cazar de día dependiendo de la disponibilidad de presas [4]. Este félido es un cazador dado a preparar emboscadas, se mueve sigilosa y pacientemente acechando la presa hasta que esta se encuentra a una distancia adecuada para atacarla, por lo general, se lanza hacia ella desde un punto ciego, con un salto rápido, realiza una carrera corta, debido a que son corredores de gran potencia y aceleración. Sin embargo, el corazón de los félidos es pequeño en comparación con su cuerpo lo que le da poca resistencia, lo cual conlleva a mantener la velocidad por poco tiempo [5].
2.2 Ecología y comportamiento del ciervo
Ciervo o simplemente venado, distribuido en gran parte de América; son animales herbívoros, “que forman grupos en función de su edad y altura, las hembras viven en manadas de decenas de ejemplares con sus crías más jóvenes, mientras que los machos se mueven de forma solitaria o en grupos mucho más reducidos, de menos de cinco individuos” [6]. Entre los predadores están los lobos, tigres, leopardos y en algunas áreas jaguares; ante estos cazadores en un proceso de acecho, solo tienen el recurso de la huida y en el caso de los más pequeños el camuflaje, pues los machos rara vez usan sus cuernos para luchar contra ellos por ser poco efectivos contra los carnívoros. Por lo general, se alimentan de brotes, hojas, plantas, siempre estando alerta a los depredadores. En la evolución estos herbívoros han desarrollado más resistencia, esto significa que corren ligeramente más lento que sus cazador, pero lo hacen durante un tiempo más prolongado, también han desarrollado la capacidad para realizar giros más rápidos y ajustados durante la huida [5].
3. Sensores
3.1 Sensor de ultrasonido
Este sensor emite una señal de ultrasonido, que al retornar permite determinar a qué distancia está el objeto, la función que desempeña en la plataforma que representa la presa, está determinada por la necesidad de saber a qué distancia está el cazador para evadirlo (figura 1).

3.2 Sensor de color
Es un sensor que actúa bajo el principio reflectivo de la luz, la intensidad de radiación reflejada que depende del color, la distancia al objeto y las perturbaciones luminosas del medio de trabajo [7]. En la plataforma, tanto del cazador como de la presa, este sensor detecta la superficie en la que se está moviendo y permite tomar la decisión de avanzar rápido o despacio; si es arena se mueve lento, si es pasto va rápido y en agua la plataforma gira para tomar otra dirección; en última instancia se detectan los límites del entorno en los que también se hace un cambio de dirección, además, en la presa permite tomar la decisión de alimentarse o saciar la sed (figura 2).
3.3 Sensor de luz
Este dispositivo mide y entrega un número entre cero (oscuridad total) y cien (muy brillante); asimismo, permite medir la intensidad luminosa de un ambiente [7], en el cazador permite identificar los obstáculos voluminosos, ya que estos emiten una intensidad de luz mayor. A través de este sensor se le proporciona a la plataforma la capacidad de reaccionar ante variaciones del nivel de luz. Los objetos voluminosos tienen una cinta de led para asegurar uniformidad en la emisión de luz y así ser identificada por el cazador (figura 3)
3.4 Sensor IRSeeker
El IRseeker es un detector infrarrojo que toma las señales de fuentes, tales como mandos a distancia por infrarrojo [8]. En la plataforma de la presa, permite identificar en qué dirección está el cazador y tomar la decisión de evadirlo, si el cazador se acerca a la presa por la derecha o la izquierda esta gira en el sentido opuesto al cual llega el felino y si la llegada del cazador se hace de forma frontal la presa gira hacia atrás para poder evadirle. En la plataforma del cazador permite identificar la dirección en la que se encuentra la presa para perseguirla.
3.5 Emisor de IR
El IR es un emisor de señales infrarrojas. La tarea es emitir una señal que es identificada tanto por la presa como por el cazador por sensores IRseeker ubicados en cada una de las plataformas a alturas y posiciones diferentes, esto le facilita a cada uno de los dispositivos realizar acciones acorde con su rol dentro del entorno.
4. Desarrollo del proyecto
4.1 Comportamiento del cazador y presa
Las dos plataformas evaden los obstáculos; en el caso de la presa el agua y la vegetación representan el alimento. La plataforma del cazador está en permanente búsqueda de la presa y cuando la encuentra aumenta su velocidad para alcanzarla. Cuando la presa percibe la presencia del cazador emprende la huida aumentado de igual forma su velocidad
4.2 Construcción de las plataformas y entorno
4.2.1 Cazador
Se construyó la estructura de la plataforma del cazador (figura 6) dentro del entorno controlado así:
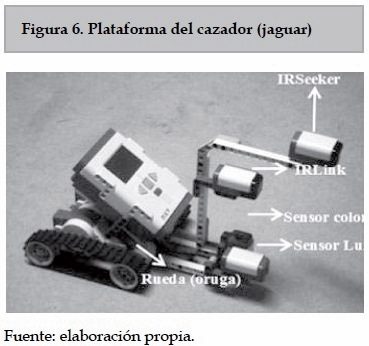
- Dimensiones: 14,0 cm de ancho, 19,2 cm de alto y 30 cm de largo.
- Motores: se ubicaron dos motores en el prototipo, con un sistema de rodamiento tipo oruga que controla los movimientos de giro y avance de la plataforma.
- Sensor de color: el sensor de color detecta la superficie del entorno; en el color verde avanza en la búsqueda de la presa, en la amarilla avanza más lento debido a la dificultad para moverse en estos terrenos, en los límites (superficie negra) se realiza un giro, igualmente en la superficie azul (agua).
- Sensor de luz: este sensor le permite al cazador evadir obstáculos voluminosos que emiten una cantidad de luz mayor a la del ambiente.
- Sensor IRSeeker: el IRSeeker recibe la señal de infrarrojo ubicada en la presa y le permite al cazador determinar si su alimento está a la derecha, al frente o a la izquierda para iniciar la persecución.
4.2.2 Presa
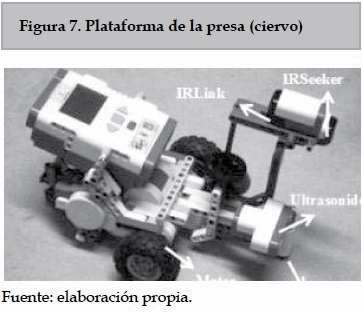
La plataforma de la presa (figura 7) consta de las siguientes partes:
- Dimensiones: 16,4 cm de ancho, 18,8 cm de alto y 25 cm de largo.
- Motores: el prototipo usa dos motores que controlan el desplazamiento, contiene dos llantas laterales y una rueda que sirve de pivote en la parte trasera lo que le da mayor flexibilidad a los giros.
- Sensor de color: el sensor de color detecta la superficie del entorno; en el color verde avanza en la búsqueda de alimento (pasto), en el color azul se detiene para beber agua, en el amarillo avanza más lento debido a la dificultad para moverse en este terreno, en los límites (superficie negra) se realiza un giro.
- Sensor de ultrasonido: este sensor determina la distancia a la cual están los obstáculos o el cazador para evitarlo.
- Sensor IRSeeker: el IRSeeker recibe la señal de infrarrojo ubicada en el cazador, le permite a la presa determinar si el felino está a la derecha, al frente o a la izquierda para iniciar la huida.
4.2.3 Entorno y obstáculos
El espacio en el que se mueven las plataformas (figura 8) está hecho en una superficie de madera pintada con vinilo, la cual está dividida en una superficie que representa la vegetación (verde), amarillo que representa arena o un terreno arcilloso, azul (agua) y negro (límite del entorno). Sus dimensiones son 2,57m, de largo 1,55m de ancho.
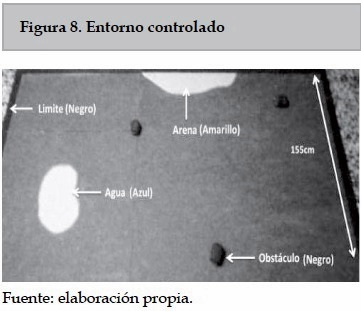
Los objetos voluminosos del entorno pueden representar pequeños arbustos o rocas, que son evadidos por las plataformas, están construidos en espuma recortable con una cinta de led alrededor para ser detectados por el cazador, sus dimensiones oscilan entre 6,4-7 cm de ancho, y 8,5-9,5 cm de espesor y 4,5 de alto lo que le permite ser detectado por el sensor de ultrasonido de la presa, en su interior poseen una batería para alimentación.
5. Pruebas y resultados
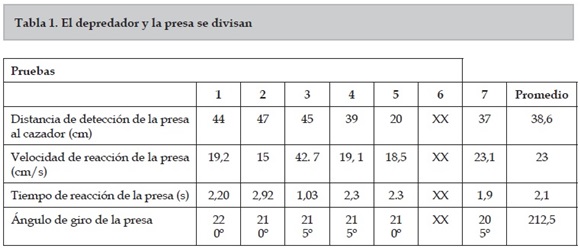
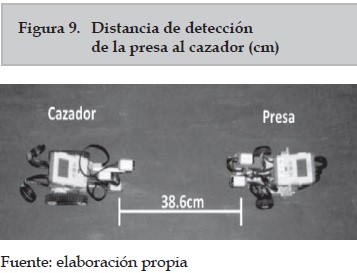
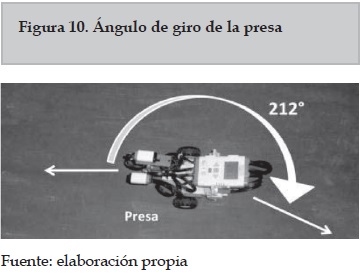
5.1 El depredador y la presa se divisan
La tabla 1 contiene los resultados de siete pruebas que se realizaron cuando las plataformas se encuentran de frente, en cada prueba se avalúan distancias, velocidades, tiempos y ángulos, en una de estas se presentó un error (XX) que no generó ningún dato, la última columna muestra el promedio de las pruebas realizadas (figuras 9 y 10).
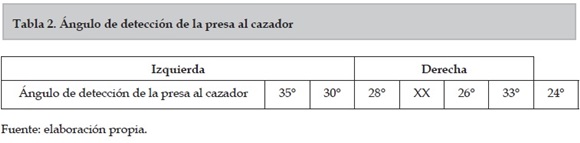
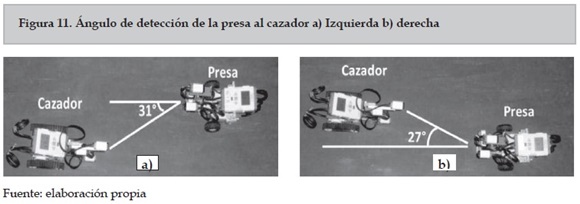
En la tabla 2 se toman siete datos, los tres primeros corresponden al ángulo de detección de la presa al cazador por la izquierda, los siguientes cuatro se realizan por la derecha y uno de ellos no genera lectura porque la plataforma no identificó al cazador. Por ende, se obtiene que el ángulo de detección total de la presa al cazador es de aproximadamente de 58°, en un encuentro frontal este es el campo de visión que tiene la presa para identificar al felino (ver figura 11)
5.2 El depredador detecta a la presa y esta no ve al cazador
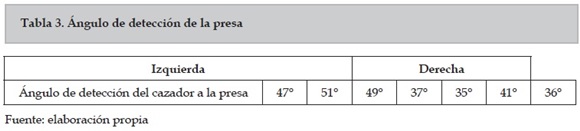
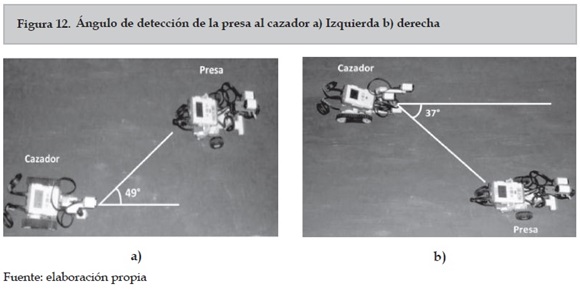
En la tabla 3 se presentan los ángulos de detección por la izquierda y la derecha del cazador a la presa, sumando y promediando el cazador tiene un ángulo de visión frontal aproximadamente de 86° (figura 12).
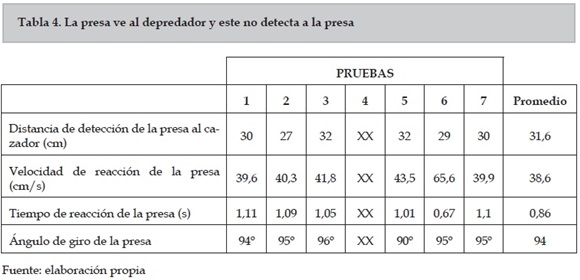
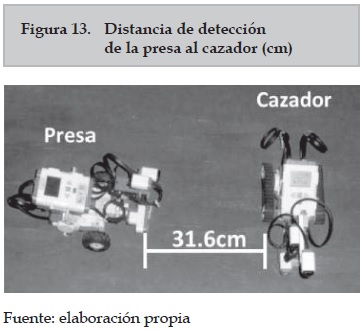
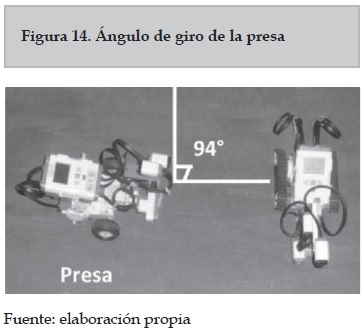
5.3 La presa ve al depredador y este no detecta a la presa
Cuando el depredador no está sigiloso y la presa lo detecta, procura evadirlo para evitar el peligro. En latabla 4 se muestran las pruebas que validan dicha situación (ver figuras 13 y 14).
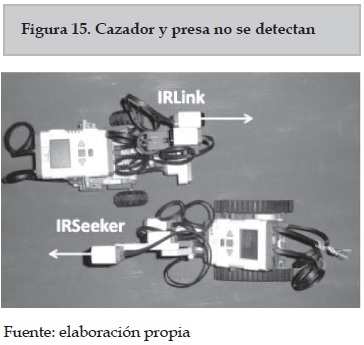
5.4 Puntos de no detección
dor no detecta la presa. La figura 15 muestra una posición en la cual las plataformas no realizan ninguna acción, porque los sensores no reciben señal uno del otro, la flecha que tiene el IR indica la dirección de la señal, la cual no llega al IRSeeker.
Como resultado se obtienen dos plataformas móviles que tienen movimientos aleatorios dentro del entorno, el objetivo de cada una es encontrar su alimento, la presa busca al pasto y el cazador busca la presa, cuando surgen encuentros de frente, la presa puede identificar al cazador en un campo visual de 68 grados de apertura y emprender la huida, si el felino llega por la parte lateral, la presa tiene un campo visual de 56 grados a la derecha y a la izquierda lo que le permite huir en dirección contraria a la que llega el felino. Por otra parte, 30 cm es la distancia máxima a la cual la presa evade al cazador si este no la ve. El felino puede identificar a la presa cuando está en un campo visual de 86 grados. Para probar la efectividad y darle un margen de supervivencia a la presa, el cazador tiene alrededor de un minuto para cazarla, si no sucede, proceso termina y la presa sobrevive, lo que le da al cazador, de acuerdo con las pruebas una efectividad de caza, aproximadamente el 70 %.
6. Conclusiones
- Debido a que se trabaja con la luz ambiente, los datos que se toman como referencia cambian en función de la intensidad y de acuerdo con el valor que se tenga, la evasión de obstáculos por parte de las plataformas debe ser ajustada desde el software, cambiando la referencia a la que se hacen los giros. De igual forma, el sensor de color se afecta con la intensidad de la luz, por lo que es necesario mantenerlo a una distancia no mayor a un centímetro de la superficie.
- La búsqueda, el acecho y la caza se pueden realizar con un sensor de ultrasonido, pero no se puede ubicar la presa si esta se mueve a la derecha o a la izquierda del campo de visión frontal de este; por lo cual se utilizan sensores de infrarrojo para captar la intensidad de las señales, que pueden venir de distintas direcciones.
- La efectividad del cazador depende del flanco por el cual este se acerca a la presa, tal como sucede en la realidad la mayoría de las veces la presa es acechada y cazada por un punto ciego [2]; si el encuentro es de frente o si el cazador llega por el lado derecho o izquierdo, la plataforma que representa la presa está en capacidad de huir y la probabilidad de ser cazada disminuye.
- En los ecosistemas naturales la supervivencia de los cérvidos está determinada por la visualización del felino que los acecha y por la distancia a la cual se encuentran del cazador para emprender la huida. En el entorno controlado se puede simular este comportamiento de una manera muy acertada, la distancia a la cual la plataforma que representa la presa, observa la plataforma que representa al cazador, es un factor que determina la efectividad de huida de esta última; si se encuentra cerca es muy probable que sea cazada, a distancias favorables a la presa, puede iniciar la huida con antelación y alejarse o perderse de la vista del cazador aumentando la probabilidad de sobrevivir.
- En la naturaleza se presentan varios tipos de interacción, uno de ellos es entre el cazador y su presa, los cuales están determinados por la visión, el olfato y la capacidad auditiva entre otros, de acuerdo con lo observado, mediante el sensor IRSeeker se puede simular de manera adecuada la capacidad visual entre plataformas con las posibilidades que se pueden presentar, que el cazador observe a su presa o que los dos se divisen.
- Un segundo tipo de interacción se presenta entre los individuos con el medio que los rodea, la relación es determinada por sentidos como la vista, para lograr esta relación los sensores color, ultrasonido y luz permiten la interacción presaentorno y cazador-entorno.
- En un entorno silvestre puede que la presa no vea el cazador, porque esta camuflado, hay obstáculos que impiden verlo o porque este es muy sigiloso al acercarse. De manera similar los puntos alrededor del sensor IRSeeker que no generan ninguna lectura pueden simular este comportamiento en las plataformas; estas son posiciones en las cuales la presa no realiza ninguna acción aun estando cerca del predador porque no lo identifica.
- Cuando el proceso de caza se realiza, las dos plataformas deben detenerse, existe una distancia a la cual el cazador termina las rutinas porque la presa está muy cerca, para lograr que esta última se detenga, la plataforma el cazador envía información que le permite a la presa tomar la decisión de detenerse, la lectura de la información emitida por el cazador presenta un retardo por parte de la presa, que se manifiesta con un movimiento posterior al envió del dato, esto se debe a las rutinas que está realizando la presa y al tiempo que tarda el programa en repetir un ciclo.
7. Agradecimientos
Al grupo de investigación en Robótica Móvil Autónoma (ROMA); a la Ing. Kristel Novoa Roldán, Tutora del proyecto y al semillero de Investigación en robótica (SIRO) por su apoyo, asesoría y colaboración durante todo el desarrollo del proyecto.
8. Referencias
[1] C. Caso, A. López-González, “Pantera Onca lista roja de especies amenazadas de la UICN,” núm. 1. enero de 2013.
[2] E. Sanderson, K. Redford, C. Chekiewicz, R. Medellin, A Rowinowitz, J. Robinson and A. Taber, Planning to save a species the jaguar as a model. Wildlife conservation society. Universidad Autónoma de México. 2001. 58-72p. [En línea] disponible en http:// www.jaguarresearchcenter.com/The_jaguar.pdf. Extraído el 17 de enero de 2013.
[3] W. Baker and L. Rock, “Jaguar species survival plan. Guidelines for Captive Management of Jaguars”. Natural History & Behavior: 8-16. [En línea] disponible en http://www.jaguarssp.com/Animal%20Mgmt/JAGUAR%20GUIDELINES.pdf
[4] Enero 2013.
[5] K. Nowell, P. Jackson, Wild Cats. Gland, Suiza: Status Survey and Conservation Action Plan - IUCN/SSC Cat Specialist Group.pp. 118-122. 1996. [En línea] disponible en http://carnivoractionplans1.free.fr/wildcats.pdf. [17 de enero de 2013].
[6] B, Leith, (Discovery Channel, “La guía máxima: Grandes felinos.”) David Hickman film LTD. Scorer associates. Documental.
[7] J. Pisarowicz, “American Elk - Cervus elephus,” National Park Service.
[8] M. Silva, “Construcción y Programación de un Grupo de Robots Móviles sobre la base del Producto Lego Mindstorms NXT,” Escuela politécnica nacional, p.214, 2011
[9] HiTechnic, HT. HiTechnic NXT IRSeeker V2 Sensor for LEGO Mindstorms NXT. [En línea] disponible en http://www.hitechnic.com/cgibin/commerce.cgi?pread d=action&key=NSK1042. [4 de febrero de 2013].
2.png)

