
DOI:
https://doi.org/10.14483/22484728.5506Publicado:
2013-12-31Número:
Vol. 7 Núm. 2 (2013)Sección:
Visión InvestigadoraAlgoritmo que reduce distorsion de imagenes ultrasonicas en ensayos no destructivos
Algorithm to reduce distortion of images ultrasonic in non destructive testing
Palabras clave:
Ultrasound, TOFD, A-Scan, D-Scan (en).Palabras clave:
Ultrasonido, TOFD, A-Scan, D-Scan (es).Descargas
Referencias
J. Rodríguez, J. Vitola y S. Sandoval, “Fundamentos teóricoprácticos de ultrasonido”, Tecnura, vol. 10, no. 20, pp. 4-18, jul.2007.
J. Rodríguez, J. Vitola y S. Sandoval, “Diseño y construcción de un sistema de ultrasonido para la detección de discontinuidades en soldadura”, Revista Colombiana de Física, vol. 41, no. 1, pp. 159-61, ene. 2009.
J. Rodríguez, J. Vitola, S. Sandoval y E. Forero, “Diseño y construcción de un sistema para examen no destructivo de fallas y defectos en metales utilizando señales ultrasónicas”, EIA, no.12, pp. 9-21, 2009.
E. Forero, y A. Rodríguez, “Procesamiento digital de señales tofd”, Journal, Stsiva, tomo I, pp. 93-97, 2008.
D. Segura y A. Rodríguez, “Interfase para el control de tarjeta de ultrasonido”, cimm, 2011.
J. Bentley, Sistemas de medición, México: cecsa, 1993.
M. Izquierdo, J. Anaya, O. Martínez y T. Sánchez, “Modelado del ruido de grano en ensayos no destructivos por ultrasonidos”, Madrid: Instituto de Automática Industrial (CSIC), 1998.
J. P. Charlesworth y J. A. Temple, Engineering applications of ultrasonic time of flight, Inglaterra: Research Studies Press, 2001.
F. Boer, M. Bonsague y R. Van Buuren, Concepts for architectural description, Telematica Instituut / Archimate Consortium, 2007.
Cómo citar
APA
ACM
ACS
ABNT
Chicago
Harvard
IEEE
MLA
Turabian
Vancouver
Descargar cita
ALGORITMO QUE REDUCE DISTORSION DE IMAGENES ULTRASONICAS EN ENSAYOS NO DESTRUCTIVOS
ALGORITHM TO REDUCE DISTORTION OF IMAGES ULTRASONIC IN NON DESTRUCTIVE TESTING
Fecha de envío: mayo de 2013
Fecha de recepción: mayo de 2013
Fecha de aceptación: octubre de 2013
Alejandro Rodríguez
Físico, Universidad Nacional de Colombia. Magister en Ingeniería de Telecomunicaciones, Universidad Politécnica de Valencia, España. Docente de la Universidad Santo Tomás, Bogotá, Colombia. Correo electrónico: alejitorm@hotmail.com
Darío Segura
Ingeniero electrónico, Universidad Santo Tomás, Bogotá, Colombia. Correo electrónico: togo3@hotmail.com
Resumen
Este artículo describe la investigación y el desarrollo de un sistema para la formación de imágenes por difracción de tiempo de vuelo (TOFD). El proceso para generarlas se logra con base en la adquisición de señales A-Scan, producto de la exploración de una probeta metálica utilizando ultrasonido, y la posterior agrupación de estas para generar un tipo de imagen bidimensional, denominada D-Scan. Dado que la metodología para obtener las señales implica un desplazamiento de los transductores de ultrasonido en dirección perpendicular a la sección transversal de la cual se desea obtener la imagen, se produce una deformación en esta que impide su utilización confiable a la hora de dictaminar una evaluación de una inspección. Para solucionar el problema se desarrolló un algoritmo que consta de dos partes: el filtrado de las muestras y su alineamiento. El algoritmo se implementó en una aplicación de C# dentro del sistema experimental de generación de imágenes TOFD. Se presentan los resultados obtenidos al explorar la unión soldada en una probeta de acero.
Palabras Clave:
Ultrasonido, TOFD, A-Scan, D-Scan
Abstract
This article, describes the search and development of a system developed for the imaging time of flight diffraction, TOFD. The process to generate them is achieved based on signal acquisition-scan, resulting from the scanning of a specimen metal using ultrasound, and the subsequent group of the same type for generating a two dimensional image, called D-Scan. Because the methodology to obtain the signals imply a displacement of the ultrasonic transducers in the direction perpendicular to the cross section of which is desired to obtain the image deformation occurs in this prevents reliable use dictate when an assessment of a trial. To solve the problem developed an algorithm which consists of two parts: the sample filtered and the alignment thereof. The algorithm was implemented in a C# within experimental system TOFD imaging and displaying the results to explore the welded steel in a test tube.
Keywords:
Ultrasound, TOFD, A-Scan, D-Scan
1. Introduccion
En varios artículos publicados por los autores se han presentado los fundamentos de los ensayos no destructivos con ultrasonido ENDU [1], el diseño y montaje de un sistema de ultrasonido para ensayos no destructivos [2,3] y el procesamiento digital de señales TOFD [4]. Una dificultad descrita en dichos artículos consiste en la lentitud del procedimiento, de modo que consideraciones de versatilidad, velocidad y utilidad práctica condujeron a la implementación de mejoras en el sistema inicial, en términos de software y algoritmos de procesamiento, logrando con ello sustanciales cambios en la metodología para la adquisición, almacenamiento y presentación de los resultados de exploraciones no destructivas de probetas, con base en la técnica de difracción de tiempo de vuelo TOFD.
En [5] se ilustra una metodología para el control de una tarjeta de ultrasonido OpCard, que se utiliza como referencia, a fin de comparar los resultados que se obtienen con esta y los que se logran mediante el sistema inicialmente desarrollado. Aunque al contrastar los resultados, estos son en esencia los mismos, la citada metodología es limitada, por cuanto se depende de aplicaciones ajenas a las desarrolladas por el grupo y, además, se debe recurrir a funciones propias de MatLab. En este trabajo, que es continuación de la labor de investigación llevada a cabo por el grupo en el área de los ensayos no destructivos utilizando técnicas ultrasónicas, se plantea una estrategia para la manipulación de ese tipo de información, apoyada en un modelo desarrollado sobre la plataforma .Net, pero que elimina esas limitaciones; esto es, el uso de la aplicación entregada por el fabricante de la tarjeta para captura de los datos y de MatLab para su análisis y visualización.
1. 1. Fundamentos
Un típico sistema de ultrasonido para llevar a cabo evaluación no destructiva está constituido por un pulsador, uno o varios palpadores que transforman energía eléctrica en mecánica y viceversa [6]; un procedimiento para recepcionar esa energía eléctrica, organizándola y almacenándola en forma de señales; una sección que realice el procesamiento de estas y la metodología de exhibición de los resultados, por lo general en forma de imágenes. La técnica difracción de tiempo de vuelo (TOFD) utiliza dos palpadores: uno como transmisor de energía acústica y otro como receptor. En la figura 1 se ilustra la forma de onda producida por un palpador (o transductor) de ultrasonido, cuando es estimulado por un sistema eléctrico o fuente de voltaje, por lo general pulsante.
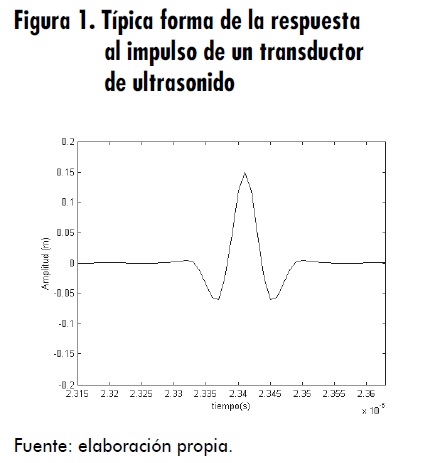
La respuesta al impulso, h(t), se puede considerar como el producto de un sinusoide con una señal paso-banda de envolvente gaussiana. El modelo matemático para representar esa clase de onda está dado por expresiones de la forma:

Donde F0 representa la frecuencia central del palpador, cuyo valor suministrado por el fabricante es 9,356 MHz [7].
De esta manera, si en la zona que se examina no existe un defecto que difracte esa onda, al receptor llega una señal que representa la variación de la amplitud en función del tiempo, denominada A-Scan, o barrido por amplitud, la cual está constituida por un pulso que representa una onda que se propaga paralelamente a la superficie superior de la pieza examinada, y otro pulso producto de la reflexión del campo acústico en la superficie inferior de la pieza (figura 2).
Si en la región bajo examen hubiese algún tipo de discontinuidad, a la señal descrita en el párrafo anterior se añaden dos pulsos, debido a la difracción causada sobre la onda ultrasónica por los bordes del defecto (ver segunda imagen en la (figura 2).
Ahora bien, sin tener en cuenta el método de imagen empleado, todos los enfoques obtienen información de los defectos por medio de señales A-Scan (variación de la amplitud en función del tiempo). En la técnica de pulso-eco, una señal A-Scan es una forma de onda eléctrica recibida por un transductor que inicialmente fue estimulado por un pulsador. El A-Scan contiene información acerca de la cantidad de energía reflejada por un defecto, lo cual se produce cuando el frente de onda del campo acústico incidente encuentra en su trayectoria de propagación un obstáculo resultante de eventuales inhomogeneidades o discontinuidades dentro del material bajo inspección.
1.2. Difracción de tiempo de vuelo
Otra técnica de imagen conocida como D-Scan (imagen del corte transversal de un espécimen, perpendicular a la dirección de exploración de este), formada con base en una agrupación de A-Scan, tiene su fundamento en la difracción que experimenta un campo acústico al interactuar con los bordes de un defecto (figura 3).
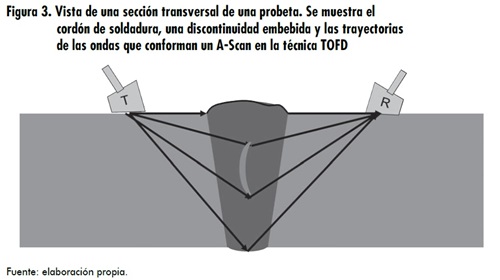
En la (figura 3) se ilustra la disposición experimental de los transductores para obtener la señal A-Scan que recibe un transductor receptor R después de que el campo acústico emitido por un transductor transmisor T se propaga a través de una unión soldada. Los palpadores para TOFD poseen un amplio campo acústico, de modo que cuando se propaga a través de un cordón de soldadura que contenga una discontinuidad, se pueden distinguir cuatro ondas cuyas trayectorias se explican a continuación: la primera, que discurre paralela a la superficie de la probeta; la segunda y la tercera, producidas por la difracción de la onda ultrasónica en los bordes superior e inferior de la discontinuidad, y la cuarta, llamada eco de fondo, generada por la reflexión de la onda de ultrasonido al incidir en la interfase determinada por la frontera inferior de la probeta y la atmósfera.
Al examinar de nuevo la imagen de la izquierda en la (figura 2), se puede deducir que si una zona de la probeta bajo estudio no contiene discontinuidades, entonces el segundo y tercer pulso, esto es, las ondas difractadas, no deberán estar presentes en la onda A-Scan y, en consecuencia, tan solo deben llegar al receptor la onda lateral y la correspondiente al eco de fondo.
1.3. Distorsión de las imágenes D-Scan
La forma de onda de un A-Scan contiene información acerca de cortes de geometría laminar pertenecientes a la sección transversal de la probeta; por tanto, cuando la pareja de palpadores, ilustrados en la figura 3, se desplazan acompasadamente en sentido paralelo al cordón de soldadura, de manera simultánea con cada avance de estos se obtiene un barrido A-Scan que un conversor análogo-digital muestrea, cuantiza y almacena; sin embargo, el desplazamiento de los palpadores difícilmente es uniforme. Debido a ello, se origina un desalineamiento de los barridos, el cual quedará registrado en una imagen bidimensional denominada D-Scan, que se forma agrupando verticalmente los barridos A-Scan uno tras otro. Esta distorsión, desde luego, menoscaba la calidad de las imágenes, ya que introduce un error aleatorio que dificulta la localización precisa de los defectos, fracturas o discontinuidades que pueda albergar la soldadura.
2. Algoritmo que disminuye la distorsión aleatoria en imágenes D-Scan
Como se mencionó en la anterior sección, el conversor análogo-digital almacena cada barrido A-Scan como una serie de números organizados como una vector fila:

Cada vez que la pareja de transductores se desplaza de manera paralela al cordón de soldadura una determinada distancia, otros vectores fila se almacenan, para luego agruparse en una matriz de la forma:
En esta el subíndice n representa un cierto movimiento de los palpadores, y el subíndice m el lapso de duración de los barridos A-Scan. Un primer algoritmo lleva a cabo la tarea de representar en forma de imagen esta información matricial, que consiste en orientar verticalmente cada uno de los n-ésimos A-Scan, y luego a las variaciones de la amplitud que estos contienen; esto es, los valores de los coeficientes en la matriz, asociarlos con tonos grises, de tal modo que los valles en la onda serán codificados por un tono gris de menor intensidad y las crestas por un tono gris de mayor intensidad [8]. ver figura 4.
- Determinar la amplitud máxima de cada A-Scan, max(Aij).
- Almacenar los índices asociados a cada uno de los max(Aij) en un arreglo (IM).
- Extraer la media del arreglo construido con base en los max(Aij) almacenados.
- Calcular el error relativo de cada elemento del arreglo IM con respecto a su media.
- Elegir un umbral que determine el ancho de una ventana de tiempo.
- Estimar qué A-Scan poseen un desfase en el tiempo dentro de los límites de la ventana y cuáles no lo poseen.
- Construir una matriz formada con los AScan contenidos dentro de la ventana.
El segundo algoritmo, el relacionado con el alineamiento de los A-Scan, sigue los siguientes pasos, o el diagrama de flujo en la Figura 5:
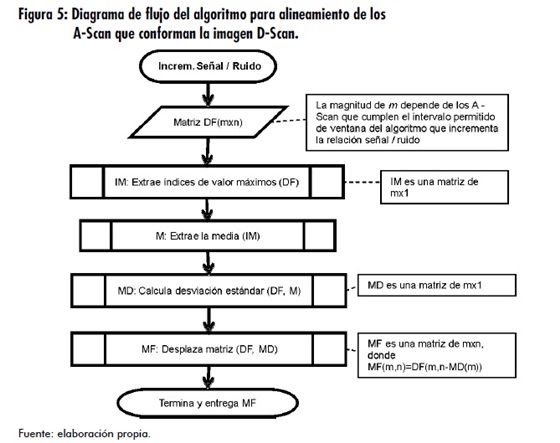
- Calcular la desviación estándar de cada A-Scan de la nueva matriz formada, resultado de los siete pasos que conforman el primer algoritmo, con base en la diferencia entre cada índice del arreglo, max(Amn), y la media calculada en el tercer paso del primer algoritmo.
- Se construye una nueva matriz formada a partir de los siete pasos que demanda el primer algoritmo, pero desplazando en el tiempo cada uno de sus elementos, una cantidad dada por la desviación estándar calculada en el ítem (a).
- A la matriz resultante se le aplica la codificación de tonos de gris, según si la amplitud es positiva o negativa.
2.1. Resultados
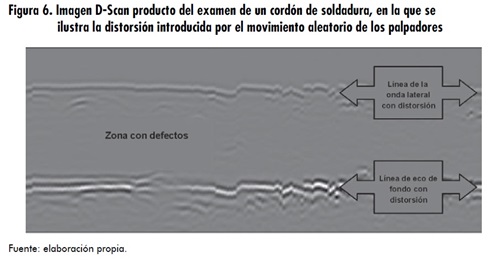
Como se explicó, una imagen bidimensional D-Scan contiene información acerca de una sección transversal de un cordón de soldadura. Los eventuales defectos se hallan contenidos en una región limitada por una línea formada a partir de múltiples ondas laterales, y otra línea conformada por la superposición de múltiples ecos de fondo. En la citada imagen queda contaminada con el zigzagueo aleatorio de los palpadores al desplazarse sobre la superficie de la probeta bajo examen y, por consiguiente, las líneas correspondientes a la onda lateral y eco de fondo exhiben una rugosidad (figura 6).
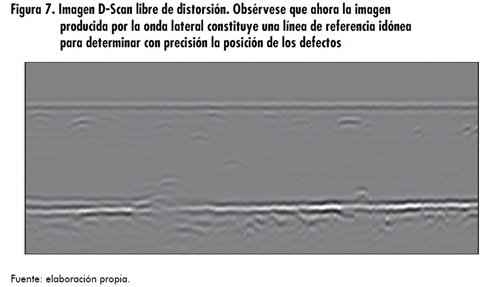
La utilidad de los algoritmos que disminuyen las distorsiones, debido al movimiento aleatorio de los palpadores, queda evidenciada en la figura 7. Su valor práctico radica en que el correcto alineamiento de tales líneas es fundamental, por cuanto con estas se dispone de un marco de referencia que permite la localización precisa de las discontinuidades. De hecho, si esa tarea se intenta realizar en una imagen D-Scan, como la representada en la figura 6, no existe ninguna confiabilidad de que las mediciones contengan una incertidumbre mínima, además de que la distorsión podría enmascarar eventuales discontinuidades, o incorporar información errónea, introduciendo imágenes espurias de defectos.
3. Conclusiones
El algoritmo, que fue implementado utilizando la herramienta libre de Microsoft Visual Studio Express 2010, empleando el lenguaje C# sobre el framework .NET [9], permite corregir las distorsiones asociadas a diversas causas que suelen presentarse en un típico ensayo no destructivo utilizando la técnica TOFD.
El sistema de ultrasonido propuesto posee un importante componente de innovación, en el sentido de que el costo para su desarrollo es bastante inferior comparado al de los sistemas comerciales; asimismo, los algoritmos implementados no demandan costos de licencias por uso de software, lo cual podría resultar atractivo para las empresas dedicadas a realizar inspección industrial mediante ensayos no destructivos utilizando ultrasonido.
3. Referencias
[1] J. Rodríguez, J. Vitola y S. Sandoval, “Fundamentos teóricoprácticos de ultrasonido”, Tecnura, vol. 10, no. 20, pp. 4-18, jul. 2007.
[2] J. Rodríguez, J. Vitola y S. Sandoval, “Diseño y construcción de un sistema de ultrasonido para la detección de discontinuidades en soldadura”, Revista Colombiana de Física, vol. 41, no. 1, pp. 159-61, ene. 2009.
[4] E. Forero, y A. Rodríguez, “Procesamiento digital de señales tofd”, Journal, Stsiva, tomo I, pp. 93-97, 2008.
[5] D. Segura y A. Rodríguez, “Interfase para el control de tarjeta de ultrasonido”, cimm, 2011.
[6] J. Bentley, Sistemas de medición, México: cecsa, 1993.
[7] M. Izquierdo, J. Anaya, O. Martínez y T. Sánchez, “Modelado del ruido de grano en ensayos no destructivos por ultrasonidos”, Madrid: Instituto de Automática Industrial (CSIC), 1998.
[8] J. P. Charlesworth y J. A. Temple, Engineering applications of ultrasonic time of flight, Inglaterra: Research Studies Press, 2001.
[9]F. Boer, M. Bonsague y R. Van Buuren, Concepts for architectural description, Telematica Instituut / Archimate Consortium, 2007.
.png)



.jpg)


