
DOI:
https://doi.org/10.14483/22484728.5514Publicado:
2013-12-31Número:
Vol. 7 Núm. 2 (2013)Sección:
Visión de CasoSoftware en tiempo real para el analisis de sistemas sonoros
Real-time software for sound systems analysis
Palabras clave:
Sound systems, alignment, discrete Fourier transform, pink noise frequency response, transfer function (en).Palabras clave:
Sistemas de sonido, alineación, transformada discreta de Fourier, ruido rosa, respuesta en frecuencia, función de transferencia (es).Descargas
Referencias
M. Díaz, Modelo de decisión para la asistencia en el proceso de alineación de un sistema de sonido, trabajo de investigación para optar al título de magíster en Ingeniería Universidad del Valle, Cali, Colombia, 2012.
P. D. Henderson, Empezando con SmaartLive: procedimientos básicos de montaje y medición, J. Woods, traductor, Whitinsville, MA, Estados Unidos: SIA Software Company, 2004.
Meyer Sound, “Capítulo de mediciones”, “capítulo altavoces”, en Guía para optimizar sistemas de sonorización, México: Meyer Sound, 2000.
E. Caicedo, M. Díaz y H. Loaiza, Smaartmaf: herramienta software para el análisis y ajuste de sistemas sonoros, Concapan XXXII IEEE Sección Nicaragua, Convención Profesional de Centro América y Panamá, Managua, Nicaragua, noviembre de 2012.
P. D. Henderson, The fundamentals of FFT-based audio measurements in SmaartLive, Whitinsville, MA, Estados Unidos: SIA Software Company, 2010.
J. Eargle y C. Foreman, JBL audio engineering for sound reinforcement, Estados Unidos: JBL Pro Audio Publications, 2002.
P. Duhamel y M. Vetterli, “Fast fourier transforms: A tutorial review and a state of the art”, Signal Processing, vol.19, no. 4, pp. 259-299, 1990.
L. Henao y L Quiñones, Spectrawav: software para el análisis de audio, trabajo de grado, Universidad Autónoma de Occidente, Cali, Colombia, 2005.
M. B. Glen, editor, A sound engineer’s guide to audio test and measurement, Estados Unidos: Elsevier, 2009.
EAW, Smaart V.6 Sound system measurement, optimization and control software, user guide, Whitinsville, MA, 2007.
Behringer, “Manual de uso ULTRADRICE PRO DCX2496, versión 1.1, 2003.
Cómo citar
APA
ACM
ACS
ABNT
Chicago
Harvard
IEEE
MLA
Turabian
Vancouver
Descargar cita
SOFTWARE EN TIEMPO REAL PARA EL ANÁLISIS DE SISTEMAS SONOROS
REAL-TIME SOFTWARE FOR SOUND SYSTEMS ANALYSIS
Fecha de envío: marzo 2013
Fecha de recepción: marzo 2013
Fecha de aceptación: mayo 2013
María F. Díaz V.
Ing. electrónica, especialista en Redes de Comunicación, MSc. en Ingeniería con énfasis en Electrónica, Universidad del Valle (Colombia). Directora de los programas de Tecnología en Electrónica y Tecnología en Telecomunicaciones de la Fundación Universitaria Católica Lumen Gentium, Cali (Colombia). Correo electrónico: dir.electrónica@unicatolica.edu.co
Eduardo Caicedo B.
Ing. electricista, MSc. en Tecnologías de la Información en fabricación, Ph.D. en Informática Industrial, docente de la Universidad del Valle, Cali (Colombia). Correo electrónico: eduardo.caicedo@correounivalle.edu.co
Humberto Loaiza C.
Ingeniero electricista, MSc. en Automática, Ph.D. en Robótica y Visión Artificial. Profesor y director de la Escuela de Ingeniería Eléctrica y Electrónica de la Universidad del Valle, Cali (Colombia). Correo electrónico: humberto.loaiza@correounivalle.edu.co
Resumen:
Los sistemas sonoros a dos vías requieren procedimientos de alineación de tiempo entre las diferentes cajas acústicas, usando procesadores de audio. Enmarcado en este objeto de estudio, el presente artículo describe la implementación de una herramienta software para el análisis de sistemas sonoros. Esta herramienta fue desarrollada en el entorno de programación visual de Matlab®, Simulink®, y es de gran utilidad para evaluar el desempeño de un equipo de sonido en un recinto mediante el análisis de su respuesta en frecuencia, la cual es afectada por la acústica del local. Las pruebas demuestran que el software es confiable y que presenta errores relativos inferiores al 4% en los diferentes modos de operación.
Palabras Clave:
Sistemas de sonido, alineación, transformada discreta de Fourier, ruido rosa, respuesta en frecuencia, función de transferencia
Abstract
The two-way sound systems require time alignment procedures between different speakers using audio processors. Framed in this object of study, this article describes the implementation of a software tool for the analysis of sound systems. This tool was developed in the visual programming environment Matlab ®, Simulink ®, and is useful for evaluating the performance of a sound in an enclosure through the analysis of the frequency response of the same, which is affected by the acoustics of the room. Tests show that the software is reliable, presenting relative errors less than 4% in the different modes of operation.
Keywords:
Sound systems, alignment, discrete Fourier transform, pink noise, frequency response, transfer function
1. Introducción
Los sistemas de audio para sonido en vivo requieren ajustes acordes con su respuesta en frecuencia, según las condiciones acústicas del recinto. Comercialmente existen herramientas software tipo caja negra que realizan esta función como el Smaart 7 de la empresa Rational Acustics o el SIM de la Meyer Sound, entre otras. El presente trabajo describe el sistema de medición de la respuesta de magnitud y fase del sistema sonoro en un recinto, el cual es esencial para desarrollar un modelo de decisión con técnicas de lógica difusa para ecualización que permitan asistir a un operador de sonido en la alineación de un sistema de audio convencional a dos vías activas, usando un procesador de audio. Este desarrollo hace parte de un proyecto mayor denominado “Modelo de decisión para la asistencia en el proceso de alineación de un sistema de sonido” [1], que tiene como propósito aliviar las limitaciones técnicas existentes hoy en día en un porcentaje importante de los operadores de sonido mediante la interfaz software Smaartmaf.
2. Definición de características y aplicaciones del sistema de medición
Con base en los trabajos o manuales de [2- 4], se definen tres modos de operación de la herramienta: modo espectro, modo respuesta al impulso y modo función de transferencia. En la tabla 1 se describen las principales características y posibles aplicaciones de estos modos de operación:
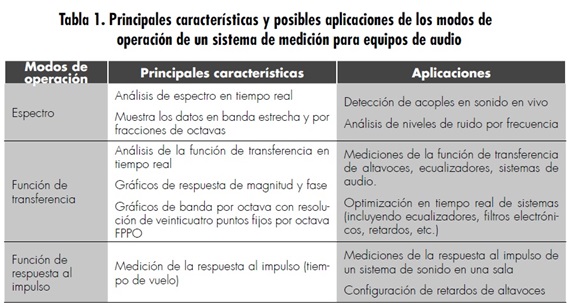
En aplicaciones de sonido en vivo se realizan ajustes de alineación con sistemas de medición que generan la transformada de Fourier de dos canales, en los modos de operación función de transferencia y respuesta al impulso. En ambos modos de operación se realiza una comparación entre las respuestas en frecuencia de la señal medida en el recinto y(n) y una señal de referencia x(n). La función de transferencia T[w] se obtiene mediante la división entre la transformada de Fourier Y(w) de la señal medida y[n] y la transformada de Fourier X(w) de la señal de referencia x[n], dado por:
La función de transferencia permite mejorar la relación señal-ruido, dando una mayor confiabilidad al sistema de medición y disminuyendo los efectos de ruidos externos [5].
La respuesta al impulso se entiende como la respuesta de un sistema bajo prueba ante una entrada de impulso. En las herramientas software para el análisis de audio, incluyendo el Smaartmaf, la respuesta al impulso es un modo de operación definido por la representación en el dominio del tiempo de la función de transferencia entre una señal de referencia o ruido rosa y la señal medida del sistema bajo prueba cuando reproduce la señal de referencia. Esta respuesta al impulso en el Smaartmaf mide el retardo de propagación o tiempo de vuelo.
3. Descripción de la plataforma de experimentación del Smaartmaf
La figura 1 presenta el diagrama de bloques de la plataforma de experimentación del Smaartmaf. Las ondas sonoras emitidas por el equipo de sonido son capturadas a través de micrófono Behringer ECM 8000 y enviadas a la entrada balanceada XLR del canal izquierdo de la tarjeta de audio Tascam US 144, la cual a su vez está conectada al PC por el puerto USB.
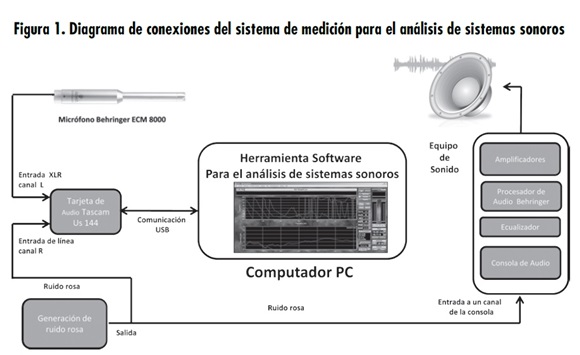
Al canal derecho de la tarjeta de audio se ingresa la señal de ruido rosa, como señal de prueba para compararse con la señal medida por el micrófono. La señal de ruido rosa también es enviada a un canal del equipo de sonido bajo prueba, donde será procesada, amplificada y reproducida por las cajas acústicas para finalmente ser detectada por el micrófono ECM 8000.
Con la señal del canal izquierdo y del canal derecho de la tarjeta de audio Tascam se calcula la respuesta en frecuencia, a través de los bloques implementados en Simulink® para el análisis del sistema sonoro.
A continuación se realiza una breve descripción de los equipos y dispositivos encontrados en el diagrama de bloques de la figura 1.
3.1. Tarjeta de audio
Tarjeta especial para mediciones acústicas con resolución de 24 bits y frecuencia máxima de muestreo de hasta 96 kHz, marca Tascam referencia Us 144. Cuenta con voltaje phantom para permitir el uso de micrófonos a condensador.
3.2. Generación de ruido rosa
Este bloque puede ser constituido por un reproductor de sonido de discos compactos, mp3 o un teléfono celular que tiene como función reproducir la señal de ruido rosa. Este ruido se caracteriza por tener una densidad espectral que decrece 3 dB por octava al incrementarse la frecuencia y es usado en el ajuste de sistemas sonoros por su semejanza con una señal musical real [6].
3.3. Computador portátil
El computador contiene instalada la herramienta software a usar para realizar las mediciones de respuesta en frecuencia en modo función de transferencia y la respuesta del espectro en modo espectro. Aunque no se requiere un equipo especializado, se recomienda un computador con un procesador Intel core i3 o equivalente y una memoria ram de 4 Gb.
3.4. Equipo de sonido bajo prueba
En este caso se puede considerar un sistema básico con una consola de mezcla, ecualizador, procesador de audio, amplificadores de potencia y bafles.
4. Implementación del sistema de medición en Simulink
En la figura 2 puede observarse el diagrama de bloques del sistema de medición para sistemas sonoros implementado en Simulink para uso del Smaartmaf. Se inicia tomando las señales de referencia con ruido rosa y la señal proveniente del micrófono ECM 8000. Los dos módulos siguientes realizan el cálculo de la FFT y el ajuste de visualización de puntos fijos por octava en el analizador. Finalmente, se calcula y se visualiza la función de transferencia de la respuesta en frecuencia, magnitud y fase del sistema sonoro.
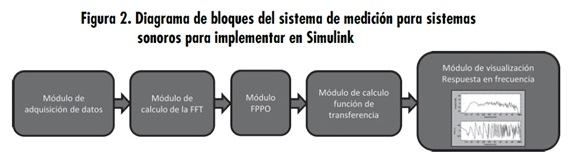
Los cinco módulos del diagrama de bloques del sistema de medición en la figura 2 se explican detalladamente a continuación.
4.1. Módulo de adquisición de datos de audio
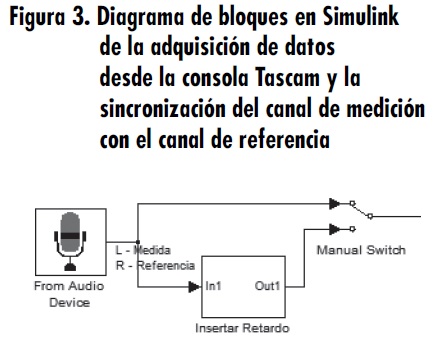
Como las señales de audio tienen un ancho de banda de 20 kHz, se usó una frecuencia de muestreo de 44 kHz para las señales provenientes de la tarjeta de audio Tascam. Debido a que la señal de referencia (o ruido rosa) y la señal medida de los bafles a través de micrófono presentan una diferencia de tiempo por la propagación en el recinto, es necesario sincronizar estas dos señales realizando una medición de la respuesta al impulso. Este tiempo se insertará como un retardo aplicado a la señal de referencia como puede apreciarse en la figura 3.
4.2. Implementación del módulo de cálculo de la FFT
Teniendo en cuenta que el espectro audible tiene señales desde 20 Hz hasta 20 kHz, se determina el tamaño del buffer a 4096 muestras en el tiempo para almacenarlas y posteriormente proceder al cálculo de la transformada rápida de Fourier FFT [7].
Para calcular la transformada rápida de Fourier, el Smaartmaf usa el bloque FFT de Simulink con el algoritmo Raíz 2 con diezmado en el tiempo, considerando que la entrada es una señal real.
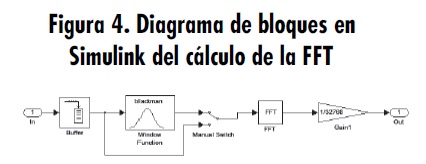
Es importante considerar el efecto Leakage [8], adicionando una ventana de análisis tipo Blackman antes de iniciar el cálculo de la FFT. El tipo de ventana puede ser seleccionado por el usuario directamente en el bloque function window teniendo la opción de escoger Blackman, Hamming, Hann o Hanning, entre otras. En la figura 4 se muestra el diagrama de bloques en Simulink para el cálculo de la FFT.
Se eligió trabajar con una resolución en frecuencia de la FFT inferior a 2 Hz, por lo que se tomaron 32000 términos para una resolución de 1,34 Hz.
4.3. Módulo FPPO
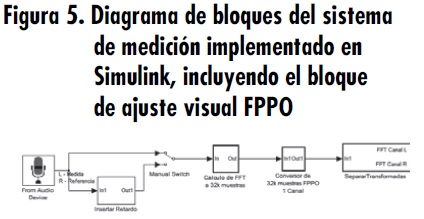
Realiza la conversión a veinticuatro puntos fijos por octava FPPO. Por facilidad de visualización las herramientas software para el análisis de audio, como el Smaart, usan la escala de octavas en sus gráficos. Esto hace que al tomar 32.000 términos de la FFT, en el grafico se tenga un alto número de valores en las octavas de las altas frecuencias respecto a las octavas de baja frecuencia. Por lo anterior, con el objetivo de mejorar la visualización de la respuesta en frecuencia, se determina trabajar con veinticuatro puntos fijos por octava FPPO, para lo cual se implementa un bloque FPPO encargado de tomar los datos de la FFT en los veinticuatro valores de frecuencia deseados para cada octava. En la figura 5 puede apreciarse la implementación de este módulo en el sistema de medición.
4.4. Implementación de un módulo para el cálculo de la función de transferencia
Al trabajar con analizadores FFT de dos canales, es necesario usar la función de transferencia que permite comparar la señal medida con una señal de prueba a través de una división. Este tipo de medición tiene una mejor relación señal a ruido, mejorando la estabilidad de este tipo de medición. Al usar la función de transferencia se puede utilizar cualquier señal como señal de prueba, sin embargo, el ruido rosa proporciona una mucho mejor estabilidad e inmunidad al ruido para mediciones en tiempo real [9].
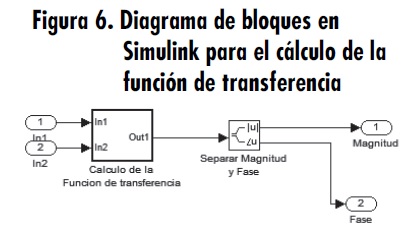
En la figura 6 puede apreciarse el diagrama de bloques en Simulink usado para el cálculo de la función de transferencia de la respuesta en magnitud y fase. Esta se obtiene dividiendo la FFT señal de medida con el micrófono de respuesta acústica plana entre la FFT de la señal de referencia o ruido rosa.
4.5. Implementación de un módulo de ajuste para visualización de la respuesta en frecuencia
Al observar los gráficos obtenidos con el Smaartmaf de las mediciones de respuesta de magnitud y respuesta de fase de las cajas acústicas, se detectaron muchas variaciones y picos en la señal, tanto en el modo función de transferencia como en el modo espectro. Por lo anterior, se acogió la recomendación del trabajo de Glen Ballou [9: 39], donde se establece que por cada duplicación de promedios en el cálculo de la FFT, la relación señal a ruido se incrementa 3 dB, definiendo un número de diez promedios como un buen comienzo. Debido a esto, se implementó un submódulo de estabilización de la función FFT para la respuesta de magnitud, el cual realiza el promedio de 32 muestras de la FFT de la señal. En el caso de la respuesta de fase, fue necesario implementar un filtro de mediana para las 32 muestras, pues al realizar el promedio mostraba una atenuación en los datos de fase cuando se realizaban mediciones de cajas acústicas.
También se implementó un submódulo Smooth para la respuesta en frecuencia y la respuesta de fase, con el objetivo de suavizar la señal, el cual consiste en un filtro promedio con una ventana de tres valores.
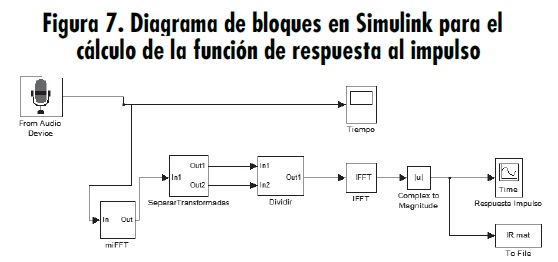
4.6. Implementación del modo de respuesta al impulso con Simulink
Para el cálculo de la respuesta al impulso puede apreciarse el diagrama en bloques de Simulink en la figura 7, donde se toman los datos de la señal de referencia y la señal de entrada del micrófono, realizando la función de transferencia, y posteriormente se calcula la FFT. Este resultado es llevado nuevamente al dominio del tiempo usando una FFT inversa, tomando la parte real para obtener el tiempo de retardo entre las dos señales [10].
5. Pruebas y resultados
5.1. Pruebas y resultados del modo función de transferencia
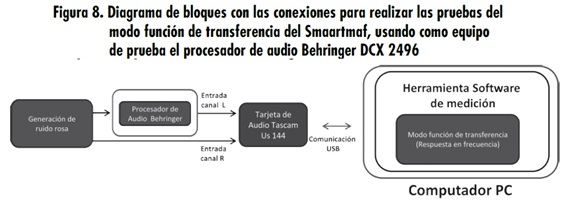
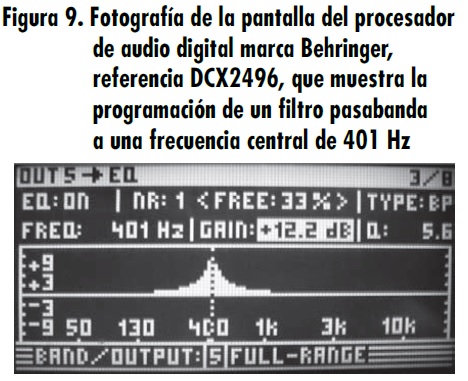
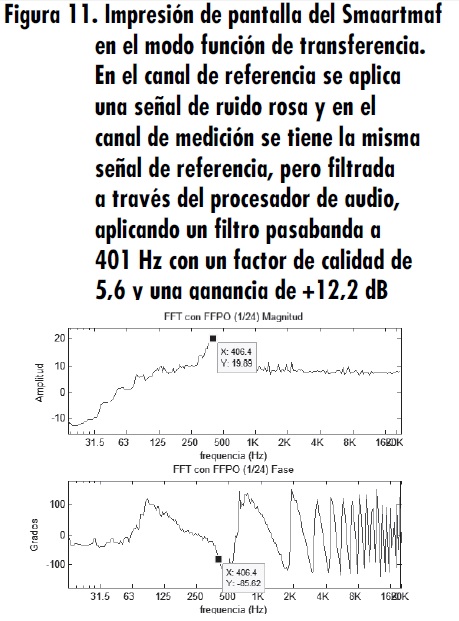
Esta prueba se realiza usando como equipo bajo prueba un procesador de audio Behringer DCX 2496, siguiendo las conexiones del diagrama de bloques de la figura 8 y empleando el modo de función de transferencia, donde en el canal de referencia se aplica una señal de ruido rosa y en el canal de medición se tiene la misma señal de referencia, pero filtrada, usando el procesador de audio como se muestra en la figura 9. El filtro aplicado es un pasabanda a la frecuencia de 401 Hz con un factor de calidad de 5,6 y una ganancia de +12,2 dB [11].
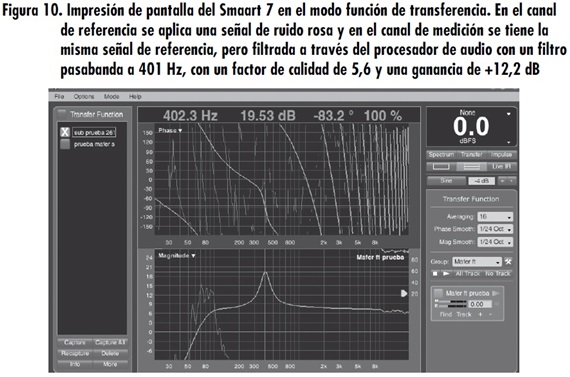
En la figura 10 puede apreciarse una impresión de pantalla de la medición realizada con Smaamart 7: respuesta de fase (gráfico superior) y respuesta de magnitud (gráfico inferior), ante la entrada del filtro pasabanda en 401 Hz. Se puede detallar el pico de la señal en 402,2 Hz con 19,93 dB de magnitud y una fase de -83,2º.
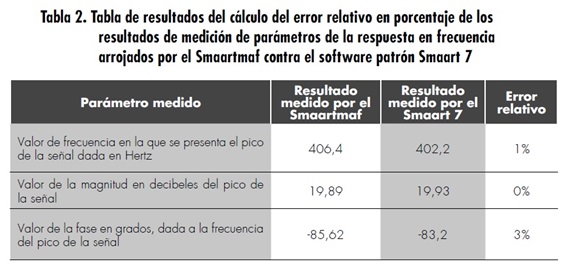
Se analizan los resultados, teniendo en cuenta que en esta prueba la respuesta en frecuencia medida con el Smaart 7 es tomada como patrón de referencia para la verificación del funcionamiento del Smaartmaf, cuyo resultado es mostrado en la figura 11. Puede calcularse entonces el valor del error relativo entre los resultados de las mediciones de las dos herramientas software. Los errores obtenidos en la prueba se consignan en la tabla 2, donde se observa que son inferiores al 4 %. Este nivel de error es lo suficientemente bajo como para considerar que la herramienta software desarrollada es confiable para las mediciones de respuesta en frecuencia.
5.2 Pruebas y resultados del modo función de transferencia del módulo de medición de la respuesta en frecuencia de una caja acústica
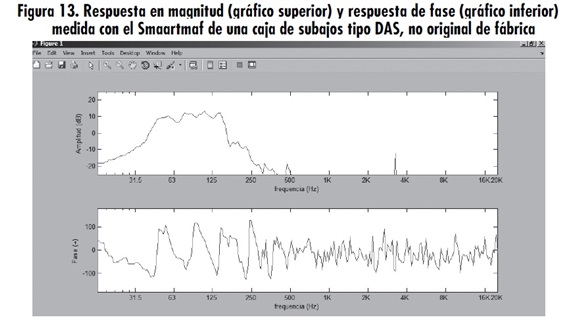
Para esta prueba del modo función de transferencia del Smaartmaf se usó como equipo bajo prueba una caja acústica de sub-bajos, de acuerdo a las conexiones descritas anteriormente en la figura 1. En la figura 12 también se muestra una fotografía donde pueden apreciarse tres cajas acústicas: una marca DAS PF 1115, en la parte superior, y en la inferior dos cajas de sub-bajos tipo DAS en cuyo interior cada una cuenta con dos parlantes marca JBL referencia 2241. La caja acústica de sub-bajos del lado derecho fue medida con el Smaartmaf para obtener su respuesta de fase y respuesta en magnitud. Esta medición fue realizada en la sala de una casa.

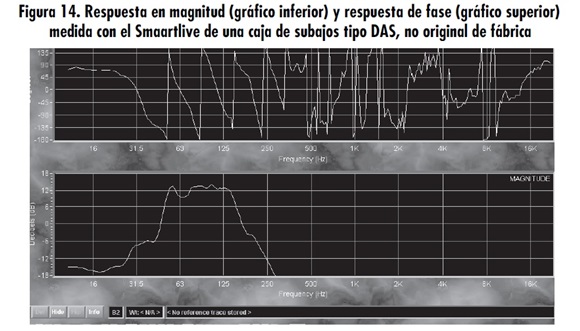
Como puede apreciarse en la figura 13, el bafle de sub-bajos tiene una respuesta de magnitud con pérdidas aceptables en el rango 63 a 125 Hz, lo esperado para este tipo de caja acústica. Comparando las figuras 13 y 14, y tomando como herramienta de medición patrón el Smaartlive, puede apreciarse una correspondencia con los gráficos y resultados de la respuesta en magnitud y repuesta de fase medidos con el Smaartmaf.
5.3. Pruebas del modo de medición de la respuesta al impulso
Es la respuesta de un sistema bajo prueba ante una entrada de impulso. En las herramientas software para el análisis de audio, incluyendo esta, la respuesta al impulso es una representación en el dominio del tiempo de la función de transferencia entre una señal de referencia o ruido rosa y la señal medida del sistema bajo prueba cuando reproduce la señal de referencia. Esta respuesta al impulso mide el retardo de propagación o tiempo de vuelo.
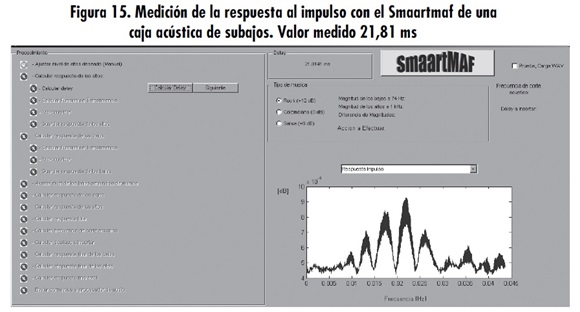
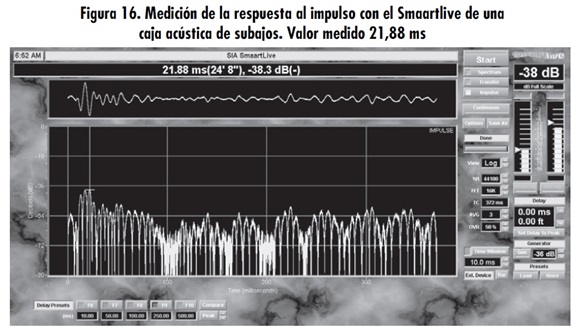
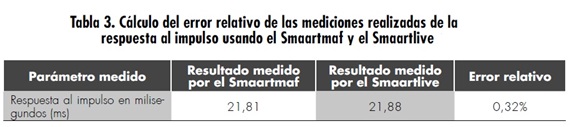
En la figura 15 se muestra una impresión de pantalla con la respuesta al impulso medida con el Smaartmaf, usando la caja acústica de sub-bajos. En la ventana de la parte superior puede observarse que el delay es de 21,81 ms. En la figura 16 puede observarse la misma medición, bajo las mismas condiciones de prueba, con el Smaartlive con un valor de 21,88 ms. Si se realiza una comparación de estos dos resultados tomando como referencia patrón el Smaartlive, se obtiene un porcentaje de error relativo del 0,3 %, como puede apreciarse en la tabla 3. Debe anotarse que las pruebas son de carácter repetitivo. Por lo tanto, los valores de la tabla respecto al error relativo representan un valor típico. Lo anterior demuestra la confiabilidad del Smaartmaf en el modo de medición de respuesta al impulso.
6. Conclusiones
El módulo de medición del Smaartmaf es una aplicación que requiere un análisis en el dominio de la frecuencia, pues el ser humano realiza el ajuste de un sistema a través de un proceso de ecualización que busca una respuesta en magnitud preferiblemente plana, en bandas por octava. Por lo anterior, en el sistema de medición se implementó un bloque para el cálculo de la transformada discreta de Fourier de la señal en el tiempo.
De acuerdo con la descripción funcional de la herramienta software Smaartmaf, para realizar un procedimiento de alineación en un sistema sonoro, es necesario que el sistema de medición cuente con dos modos de operación: función de transferencia y respuesta al impulso. El primero para mejorar la relación señal a ruido y obtener una medición confiable y menos sensible a ruidos externos. El segundo permite conocer el retardo necesario para sincronizar en tiempo las dos vías del equipo y mejorar su respuesta en frecuencia de corte acústico. La herramienta software calcula treinta y dos promedios de la FFT para mejorar la relación señal ruido y estabilizar la señal.
Una herramienta software para la medición de la respuesta en frecuencia de un sistema sonoro debe contar con, al menos, una resolución de veinticuatro puntos fijos por octava. Esto permite confiabilidad para realizar ajustes de ecualización sin omitir información de posibles filtros de peine que puedan presentarse. Adicionalmente, los puntos fijos por octava mejoran la visualización de alta frecuencia de la señal.
Al observar los gráficos obtenidos con el Smaartmaf de las mediciones de respuesta de magnitud y respuesta de fase de las cajas acústicas en tiempo real, se obtuvieron señales completamente inestables, tanto en el modo función de transferencia como en el modo espectro. Por lo anterior, se implementó un sub-módulo de estabilización de la función FFT para la respuesta de magnitud, el cual realiza el promedio de 32 muestras de la FFT de la señal. En el caso de la respuesta de fase fue necesario implementar un filtro de mediana para las 32 muestras, pues al realizar el promedio mostraba una atenuación en los datos de fase cuando se realizaban mediciones de cajas acústicas.
También se implementó un submódulo Smooth para la respuesta en frecuencia y la respuesta de fase, con el objetivo de suavizar la señal, el cual consiste en un filtro promedio con una ventana de tres valores.
Como trabajo futuro en el interior de los grupos de investigación “Percepción y Sistemas Inteligentes” (PSI) de la Universidad del Valle y “Grupo de Aplicaciones en Ingeniería” (GAIN) de la Fundación Universitaria Católica Lumen Gentium, se tiene propuesto analizar el efecto de los valores de coherencia en el modelo de decisión. La coherencia indica la fidelidad que tiene la medición respecto a una relación señal a ruido. Esto permitiría un mejor desempeño del sistema en ambientes ruidosos.
Referencias
[1] M. Díaz, Modelo de decisión para la asistencia en el proceso de alineación de un sistema de sonido, trabajo de investigación para optar al título de magíster en Ingeniería Universidad del Valle, Cali, Colombia, 2012.
[2]P. D. Henderson, Empezando con SmaartLive: procedimientos básicos de montaje y medición, J. Woods, traductor, Whitinsville, MA, Estados Unidos: SIA Software Company, 2004.
[3] Meyer Sound, “Capítulo de mediciones”, “capítulo altavoces”, en Guía para optimizar sistemas de sonorización, México: Meyer Sound, 2000.
[4]E. Caicedo, M. Díaz y H. Loaiza, Smaartmaf: herramienta software para el análisis y ajuste de sistemas sonoros, Concapan XXXII IEEE Sección Nicaragua, Convención Profesional de Centro América y Panamá, Managua, Nicaragua, noviembre de 2012.
[5]P. D. Henderson, The fundamentals of FFT-based audio measurements in SmaartLive, Whitinsville, MA, Estados Unidos: SIA Software Company, 2010.
[6] J. Eargle y C. Foreman, JBL audio engineering for sound reinforcement, Estados Unidos: JBL Pro Audio Publications, 2002.
[7] P. Duhamel y M. Vetterli, “Fast fourier transforms: A tutorial review and a state of the art”, Signal Processing, vol.19, no. 4, pp. 259-299, 1990.
[8] L. Henao y L Quiñones, Spectrawav: software para el análisis de audio, trabajo de grado, Universidad Autónoma de Occidente, Cali, Colombia, 2005.
[9] M. B. Glen, editor, A sound engineer’s guide to audio test and measurement, Estados Unidos: Elsevier, 2009.
[10] EAW, Smaart V.6 Sound system measurement, optimization and control software, user guide, Whitinsville, MA, 2007.
[11] Behringer, “Manual de uso ULTRADRICE PRO DCX2496, versión 1.1, 2003.
.png)



.jpg)


