DOI:
https://doi.org/10.14483/udistrital.jour.tecnura.2016.2.a03Publicado:
01-04-2016Número:
Vol. 20 Núm. 48 (2016): Abril - JunioSección:
InvestigaciónUna prueba fuera del laboratorio de una interfaz cerebro computador basada en potenciales de estado estable evocados visualmente
Steady state visually evoked potentials based Brain computer interface test outside the lab
Palabras clave:
BCI, Combinación de Mínima Energía, Interfaz cerebro computador, MEC, potenciales de estado estable evocados visualmente, SSVEP. (es).Palabras clave:
BCI, Brain Computer Interface, MEC, Minimum Energy Combination, SSVEP, Steady State Visually Evoked Potentials, (en).Descargas
Referencias
Allison, B.; Graimann, B. y Gräser, A. (13-15 de junio de 2007). Why Use A BCI If You Are Healthy? BRAINPLAY 07. Brain-Computer Interfaces and Games Workshop at ACE (Advances in Computer Entertainment), 1-5. Salzburgo, Austria.
Cheng, M.; Gao, X.; Gao, S. y Dingfeng, X. (octubre de 2002). Design and Implementation of a Brain-Computer Interface with High Transfer Rates. IEEE Transactions on Biomedical Engineering, 49(10), 1181-1186.
Diez, P.F.; Mut, V.A.; Avila P., E. y Laciar L., E. (14 de julio de 2011). Asynchronous BCI control using high-frequency SSVEP. Journal of Neuroengineering and Rehabilitation, 8(39), 1-8.
Edlinger, G. y Guger, C. (1-4 de julio de 2012). A Hybrid Brain-Computer Interface for Improving the Usability of a Smart Home Control. Proceedings of 2012 ICME International Conference on Complex Medical Engineering. Kobe, Japón.
Francois, V.; Monique, M.; Dauwels, J. y Cichocki, A. (2010). Steady-State Visually Evoked Potentials: Focus on Essential Paradigms and Future Perspectives. Progress in Neurobiology, 90, 418-438.
Friman, O.; Volosyak, I. y Gräser, A. (abril de 2007). Multiple Channel Detection of Steady-State Visual Evoked Potentials for Brain-Computer Interfaces. IEEE Transactions on Biomedical Engineering, 54(4).
Hortal, E.; Úbeda, A.; Iánez, E. y Azorín, J.M. (2014). Control of a 2 DoF robot using a Brain–Machine Interface. Computer Methods and Programs in Biomedicine, 116, 169-176.
Hwang, H.J.; Lim, J.H.; Jung, Y.J.; Choi, H. y Woo Lee, S. (30 de junio de 2012). Development of an SSVEP-Based BCI Spelling System Adopting a QWERTY-Style LED Keyboard. Journal of Neuroscience Methods, 59-65.
Hwang, H.J.; Lim, J.H.; Lee, J.H. e Im, C.H. (18-20 de febrero de 2013). Implementation of a Mental Spelling System Based on Steady-State Visual Evoked Potential (SSVEP). International Winter Workshop on Brain-Computer Interface (BCI). Gangwon, Corea del Sur.
Iáñez, E.; Azorín, J.M.; Úbeda, A.; Fernández, J.M. y Fernández, E. (13 de diciembre de 2010). Mental Tasks-Based Brain–Robot Interface. Robotics and Autonomous Systems, 58(12), 1238-1245.
Lim, J.H.; Hwang, H. J. e Im, C.H. (18-20 de febrero de 2013). “Eyes-Closed” SSVEP-Based BCI for Binary Communication of Individuals with Impaired Oculomotor Function. International Winter Workshop on Brain-Computer Interface. Gangwon, Corea del Sur.
Martinez, P.; Bakardjian, H. y Cichock, A. (22 de mayo de 2007). Fully Online Multicommand Brain-Computer Interface with Visual Neurofeedback Using SSVEP Paradigm. Computational Intelligence and Neuroscience, 1-9.
Cómo citar
APA
ACM
ACS
ABNT
Chicago
Harvard
IEEE
MLA
Turabian
Vancouver
Descargar cita
DOI: http://dx.doi.org/10.14483/udistrital.jour.tecnura.2016.2.a03
Una prueba fuera del laboratorio de una interfaz cerebro computador basada en potenciales de estado estable evocados visualmente
Steady state visually evoked potentials based Brain computer interface test outside the lab
Eduardo Francisco Caicedo Bravo1, Jaiber Evelio Cardona Aristizábal2
1 Ingeniero Electricista, Máster en Tecnologías de la Información en Fabricación, Doctor en Ingeniería: Informática Industrial. Profesor Titular de la Universidad del Valle, Director del Grupo de Investigación Percepción y Sistemas Inteligentes. Cali, Colombia. Contacto: eduardo.caicedo@correounivalle.edu.co
2 Ingeniero Electrónico, Magister en Automática, Estudiante de Doctorado en Ingeniería. Profesor Asociado de la Universidad del Quindío. Armenia, Colombia. Contacto: jaibercardona@uniquindio.edu.co
Fecha de recepción: 17 de marzo de 2015 Fecha de aceptación: 15 de febrero de 2016
Cómo citar: Caicedo Bravo, E. F., & Cardona Aristizábal, J. E. (2016). Una prueba fuera del laboratorio de una interfaz cerebro computador basada en potenciales de estado estable evocados visualmente. Revista Tecnura, 20(48), 41-52. doi: 10.14483/udistrital.jour.tecnura.2016.2.a03
Resumen
Contexto: Los potenciales de estado estable evocados visualmente (SSVEP) surgen como una de las señales medidas del cerebro más promisorias para la implementación de interfaces cerebro computador (BCI), sin embargo las aplicaciones realizadas generalmente son limitadas a ambientes restringidos de laboratorio presentando mínimas pruebas en ambientes donde las condiciones son exigentes.
Método: Se implementó un sistema BCI basado en SSVEP cuyas pruebas se realizaron en un ambiente no controlado con altos niveles de distracción y con la presencia de gran cantidad de público. Al usuario se le propone un laberinto donde un avatar debe ser llevado a un objetivo representado por una casa. Para mover el avatar el voluntario debe fijar su mirada en uno de los cuatro estímulos visuales, los estímulos visuales representan las cuatro direcciones: izquierda, arriba, derecha y abajo. El sistema fue usado sin ningún tipo de calibración.
Resultados: 32 voluntarios usaron el sistema y 20 lograron el objetivo con una precisión mayor al 60%, incluyendo 9 con una precisión del 100%, 7 lograron el objetivo con una precisión menor al 60% y 5 se retiraron antes de conseguir el objetivo. Para los voluntarios que lograron una precisión mayor al 60% se alcanzó en promedio un tiempo de detección de 6,4s, una precisión de 79% y una razón de transferencia de información (ITR) de 8,78bits/s.
Conclusiones: Se pudo mostrar un sistema BCI basado en SSVEP de bajo costo, probado en un evento público, sin procedimientos de calibración, de fácil instalación y usado por personas en un amplio rango de edades. Los resultados muestran que es factible llevar este tipo de sistemas a ambientes fuera del laboratorio.
Palabras clave: BCI, Combinación de Mínima Energía, Interfaz cerebro computador, MEC, potenciales de estado estable evocados visualmente, SSVEP.
Abstract
Context: Steady State Visually Evoked Potentials (SSVEP) are brain signals which are one of the most promising signals for Brain Computer Interfaces (BCIs) implementation, however, SSVEP based BCI generally are proven in a controlled environment and there are a few tests in demanding conditions.
Method: We present a SSVEP based BCI system that was used outside the lab in a noisy environment with distractions, and with the presence of public. For the tests, we showed a maze in a laptop where the user could move an avatar looking for a target that is represented by a house. In order to move the avatar, the volunteer must stare at one of the four visual stimuli; the four visual stimuli represent the four directions: right, up, left, and down. The system is proven without any calibration procedure.
Results: 32 volunteers utilized the system and 20 achieved the target with an accuracy above 60%, including 9 with an accuracy of 100%, 7 achieved the target with an accuracy below 60% and 5 left without achieving the goal. For the volunteers who reached accuracy above 60%, the results of the performance achieved an average of 6,4s for command detections, precision of 79% and information transfer rate (ITR) of 8,78 bits/s.
Conclusions: We showed a SSVEP based BCI system with low cost, it was proved in a public event, it did not have calibration procedures, it was easy to install, and it was used for people in a wide age range. The results show that it is possible to bring this kind of systems to environments outside the laboratory.
Keywords: BCI, Brain Computer Interface, MEC, Minimum Energy Combination, SSVEP, Steady State Visually Evoked Potentials.
Introducción
Un sistema BCI permite realizar comunicación desde el cerebro hacia un sistema digital sin el uso de los canales normales de salida como los nervios periféricos y los músculos (Wolpaw et al., 2000). Esto tiene aplicaciones directas en la recuperación de autonomía de personas con pérdida severa de la movilidad al darles acceso a interactuar con el mundo en temas como comunicación y control, entretenimiento, substitución motora y recuperación motora (Millán et al., 2010). Además de las aplicaciones para personas con limitaciones en su movilidad, también aparecen aplicaciones para personas sanas sobre todo en juegos, multimedia y realidad virtual (Allison, Graimann y Gräser, 2007). Uno de los BCI más promisorios es el basado en señales SSVEP debido a la fácil configuración, tiempo de calibración bajo o nulo, y alta velocidad en comparación con los basados en otro tipo de señales (Rak, Kołodziej y Majkowski, 2012), además son menos susceptibles al ruido electromiográfico y a los artefactos producidos por los movimientos oculares y de los párpados (Francois, Monique, Dauwels y Cichocki, 2010) debido a que dichos artefactos se producen en zonas del cerebro diferentes a las usadas para detectar SSVEP.
En un sistema BCI basado en SSVEP se muestra un estímulo visual que varía a una frecuencia fija y que genera un aumento de la actividad a dicha frecuencia en la parte occipital del cerebro cuando el usuario concentra su mirada en el estímulo, por tanto se puede detectar si el usuario presta o no atención al estímulo al medir la actividad en la frecuencia correspondiente. Con este esquema se pueden tener varios estímulos visuales que oscilan a diferentes frecuencias, cada uno correspondiendo a un comando distinto, y el usuario puede poner su atención el estímulo acorde al comando que quiere seleccionar, cuando en la parte occipital del cerebro se detecta un aumento en alguna de las frecuencias de los estímulos presentes entonces se puede inferir que el usuario quiere ejecutar el comando correspondiente. Las señales SSVEP también son estables en su fase por lo que se puede usar una sola frecuencia en los estímulos pero con diferente fase, al usuario mirar un estímulo se da un aumento en la frecuencia definida y el comando se determina al calcular la fase.
Los BCI basados en SSVEP se aplican en temas como movimiento de sillas de ruedas (Singla, Khosla y Jha, 2013; Singla y Haseena, 2013; Torres, Freire y Sarcinelli, 2013; Díez et al., 2013), teclados numéricos (Cheng, Gao, Gao y Dingfeng, 2002), teclados alfanuméricos (Hwang et al., 2012; Hwang, Lim, Lee e Im, 2013), posicionamiento de una cama de hospital (Shyu et al., 2013), movimiento de prótesis (Müller y Pfurtscheller, 2008), movimiento en laberintos (Martinez, Bakardjian y Cichock, 2007; Diez et al., 2011), control de una casa inteligente (Edlinger y Guger, 2012), control de robots (Hortal, Úbeda, Iánez y Azorín, 2014; Zhang et al., 2012; Iáñez et al., 2010), detección de sueño en conductores (Resalat, Saba y Afdideh, 2012), juegos de defensa (Vliet et al., 2012), e incluso propuestas para la comunicación de personas con limitación severa del movimiento incluyendo los ojos y parpados (Lim, Hwang e Im, 2013; (Nishifuji y Kuroda, 2012). Sin embargo, la mayoría de los desarrollos se han probado en ambientes muy restringidos y controlados, y se han limitado a aplicaciones de laboratorio en donde las condiciones de iluminación, perturbaciones a las personas y ruido electrónico son controladas.
Algunos sistemas BCI basados en SSVEP se han probado en ambientes menos controlados; por ejemplo, se combina el uso de SSVEP con desincronización relacionada a eventos (ERD) para el comando de un carro (Castillo et al., 2014), para escribir palabras (Allison et al., 2010) y para comandar un robot miniatura en un laberinto (Volosyak et al., 2011).
En este trabajo se prueba un sistema BCI basado en SSVEP con ensayos fuera del laboratorio. Dichas pruebas fueron realizadas en un espacio abierto con gran movimiento alrededor de la persona bajo estudio, en donde se expuso el sistema y se dio libre acceso a los voluntarios que quisieran probarlo; en total lo probaron 32 personas.
El sistema presenta un laberinto en el cual se debe llevar un avatar a un objetivo indicado con una casa, para ello se presentan cuatro estímulos visuales oscilando a diferentes frecuencias correspondientes a los comandos izquierda, arriba, derecha y abajo que son los movimientos que puede realizar el avatar. Para detectar el estímulo visual al que presta atención, el usuario se calcula la actividad en cada una de las frecuencias a través del método denominado combinación de mínima energía (MEC, por su sigla en inglés) (Friman, Volosyak y Gräser, 2007), cuando se establece que la actividad ha aumentado se realiza el movimiento correspondiente.
Este artículo se desarrolla de la siguiente manera: primero se hace una descripción del software, hardware y los métodos aplicados, luego se presentan los resultados encontrados y, por último, se plantean las conclusiones generadas.
Metodología
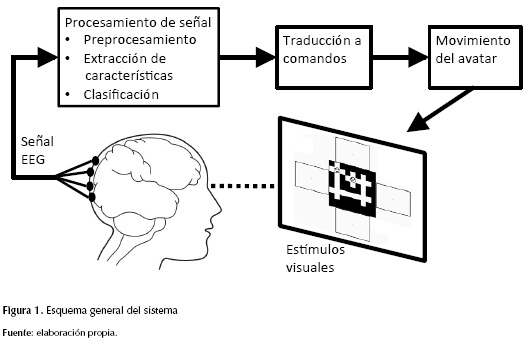
El sistema completo en sus partes genéricas se observa en la figura 1, en la pantalla del computador se muestra en el centro un laberinto y cuatro estímulos visuales distribuidos en cada extremo del laberinto. El usuario debe fijar su mirada en el estímulo visual que está en la dirección a la cual quiere desplazarse dentro del laberinto; con la intención de detectar si el usuario está prestando atención a algún estímulo visual se toman las señales de electroencefalograma (EEG) en la parte occipital del cerebro, dichas señales son enviadas al computador y procesadas, y una vez determinado un estímulo visual observado se realiza una traducción a comandos y el correspondiente movimiento del avatar. Este ciclo se repite hasta terminar el juego.
Hardware
Para medir la actividad cerebral se usa un equipo Emotiv Epoc lector de ondas EEG el cual mide 14 puntos del cuero cabelludo de forma no invasiva, mediante electrodos que no requieren gel, aunque el uso de este tipo de electrodos genera un alto nivel de ruido eléctrico, permite una fácil puesta en marcha del experimento al requerir poco tiempo para ser colocado adecuadamente en la cabeza. De los 14 electrodos solo 4 están en la parte occipital del cerebro por lo que se opta por rotar 180 grados en sentido horizontal el Emotiv Epoc, con lo cual se incrementa a 8 el número de electrodos aptos para determinar el aumento de la actividad en la parte occipital del cerebro. Aunque el número de electrodos usados para el procesamiento crece, se encuentra como desventaja que no se puede conocer la posición exacta de estos.
Los datos de los electrodos son enviados de forma inalámbrica a un computador con monitor de 14 pulgadas con 1280×800 pixeles, 2 Gbytes de RAM, procesador de 1,83 Ghz Intel Core 2 y Windows Vista como sistema operativo, el cual procesa los datos de las señales medidas de los electrodos y realiza una estimación, por medio del cálculo del MEC, sobre el estímulo visual que el usuario está observando. Asimismo, el computador muestra el laberinto y los estímulos visuales.
Software
El juego implementado consta de dos laberintos, un laberinto inicial que es igual en su configuración para todos los participantes, contando con un solo camino correcto para llegar al objetivo, y un laberinto libre en el que la posición del avatar y el objetivo se colocan de manera aleatoria y se tienen varias posibilidades para llegar al objetivo; el desplazamiento del avatar siempre se hace desde la posición presente hasta el siguiente cruce.
Para este trabajo se usaron solamente los datos relacionados al laberinto inicial debido a que se tiene claro cuál es el movimiento pretendido por el jugador lo que a su vez permite calcular la precisión. En el laberinto inicial (figura 2), se puede notar que se requieren los movimientos en el orden: derecha, abajo, izquierda y arriba para llegar al objetivo, de igual manera se muestran los cuatro estímulos visuales usados para cada uno de los movimientos.
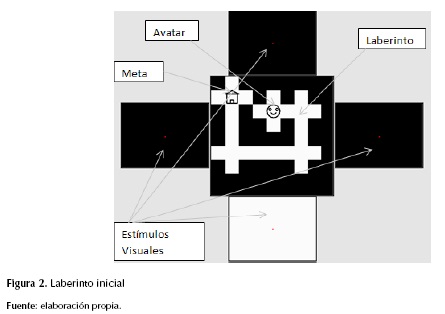
El laberinto está establecido de forma que en cada uno de los cruces del camino correcto existe la posibilidad de entrar en un callejón sin salida al detectar el movimiento incorrecto, en ese caso el usuario debe ejecutar el comando contrario para volver al camino principal. Aunque solo habría un movimiento posible se siguen mostrando los cuatro estímulos visuales e igualmente se realiza la detección sobre ellos; si se detecta un comando en una dirección hacia la que no hay camino no se realiza movimiento.
Cada estímulo visual consiste en rectángulos de 200×100 pixeles que cambian entre blanco y negro, cada color se mantiene un número exacto de ciclos de refresco del monitor, por lo que las frecuencias obtenidas son divisores exactos de 60hz, que es la frecuencia del monitor, se utilizan entonces 4, 5, 6 y 7 ciclos, generando las frecuencias 15 Hz, 12 Hz, 10 Hz y 8,57 Hz respectivamente; en cada estímulo visual está presente un punto rojo en el centro para enfocar la mirada. Al tomar los datos EEG de la parte occipital del cerebro, se puede inferir el estímulo visual al cual el usuario está mirando al realizar el cálculo del MEC que se muestra en el siguiente apartado.
Combinación de mínima energía (MEC)
Cada td segundos se toman los datos medidos en los electrodos correspondientes a los últimos tMEC segundos; para cada electrodo se resta el promedio de los datos y se divide por la desviación estándar, para tener una media 0 y una varianza igual a 1 en cada canal. Para determinar si se está fijando la mirada a un estímulo y, en caso tal, a que estímulo corresponde, los datos en los electrodos de interés son transformados de acuerdo con el procedimiento denominado combinación de mínima energía (Friman, Volosyak y Gräser, 2007), el cual se describe a continuación.
Si un estímulo visual de frecuencia f al cual el voluntario le está prestando atención, afecta la señal en un electrodo i, entonces la actividad en dicho electrodo puede escribirse como en la ecuación (1).

Donde yi(t) es la señal en el electrodo i, siendo igual a una expresión dividida en tres partes; la primera parte corresponde a las señales evocadas por el estímulo, donde: Nh es el número de múltiplos de la frecuencia de interés presentes, ai,k es la magnitud del múltiplo k del electrodo i, y fi,k es la fase del múltiplo k del electrodo i. La segunda componente, Zj(t), hace referencia a estados mentales diferentes que afectan varios electrodos, donde bi,j es la magnitud de la señal Zj(t) en el electrodo i. Y la tercera componente corresponde al ruido propio el electrodo i, marcado como ei(t).
Si se tiene una frecuencia de muestreo Fs y se cuenta con Nt muestras sucesivas, se puede relacionar la salida del electrodo i como muestra la ecuación (2).

Donde la salida del electrodo i corresponde a un vector de Nt muestras sucesivas y tamaño Nt x 1, que cumple  . La matriz
. La matriz  es de dimensión Nt x 2Nh y contiene las componentes seno y coseno de la frecuencia de interés y sus múltiplos, donde cada submatriz Xk es una matriz con dos columnas y Nt filas, conteniendo en cada columna las componentes
es de dimensión Nt x 2Nh y contiene las componentes seno y coseno de la frecuencia de interés y sus múltiplos, donde cada submatriz Xk es una matriz con dos columnas y Nt filas, conteniendo en cada columna las componentes  . ai es un vector de tamaño 2Nh, con las amplitudes de cada componente de la frecuencia y sus múltiplos. Z es una matriz que contiene estados mentales comunes a todos los electrodos y bi sus correspondientes amplitudes, y ei es un vector que posee el ruido propio del electrodo i.
. ai es un vector de tamaño 2Nh, con las amplitudes de cada componente de la frecuencia y sus múltiplos. Z es una matriz que contiene estados mentales comunes a todos los electrodos y bi sus correspondientes amplitudes, y ei es un vector que posee el ruido propio del electrodo i.
Al reunir Ny electrodos, la señal obtenida en estos se puede ver de forma compacta como muestra la ecuación (3).

Cada columna de la señal  contiene las muestras de un electrodo, la matriz A contiene las amplitudes de las componentes sinusoidales de la frecuencia de interés y sus múltiplos, B contiene las amplitudes de estados mentales comunes a los electrodos y E en cada columna contiene ruido propio del correspondiente electrodo.
contiene las muestras de un electrodo, la matriz A contiene las amplitudes de las componentes sinusoidales de la frecuencia de interés y sus múltiplos, B contiene las amplitudes de estados mentales comunes a los electrodos y E en cada columna contiene ruido propio del correspondiente electrodo.
La combinación de mínima energía pretende encontrar una transformación que disminuya la energía de las señales adicionales a las SSVEP; si la transformación conserva las señales SSVEP quiere decir que estas están presentes, de lo contrario no lo están. Para encontrar la transformación primero se remueven las componentes SSVEP de la señal, para lo cual se obtiene la proyección ortogonal de las señales sinusoidales de la frecuencia de interés y sus múltiplos en los datos originales y se les resta a estos últimos, de acuerdo con la ecuación (4).

Al quitar las componentes SSVEP, la señal modificada aproximadamente contendrá solamente los valores debidos a otros estados mentales y al ruido propio de cada canal, como muestra la ecuación (5).

Una vez las componentes SSVEP son removidas, se debe encontrar un vector de transformación w, de magnitud unitaria, que disminuya la energía de la señal resultante  , es decir se debe resolver el problema de optimización dado por la ecuación (6).
, es decir se debe resolver el problema de optimización dado por la ecuación (6).

Para encontrar el valor de w se usa la matriz simétrica  , a la cual se le calculan los valores propios en cuyos valores se encuentran los límites máximo y mínimo del lado derecho de la ecuación (6). Dado que la matriz es simétrica, entonces los vectores propios generaran canales no correlacionados al ser vectores ortogonales.
, a la cual se le calculan los valores propios en cuyos valores se encuentran los límites máximo y mínimo del lado derecho de la ecuación (6). Dado que la matriz es simétrica, entonces los vectores propios generaran canales no correlacionados al ser vectores ortogonales.
Los valores propios contienen el valor de energía que se conserva con la transformación de su vector propio equivalente, entonces el vector propio correspondiente al menor valor propio es la solución a la ecuación 6; sin embargo, se toman los valores propios que en total conserven un poco más del 10 % de la energía total (Friman, Volosyak y Gräser, 2007). Si los valores propios son ordenados de menor a mayor de la forma  , entonces se debe encontrar el mínimo Ns que cumpla la ecuación (7).
, entonces se debe encontrar el mínimo Ns que cumpla la ecuación (7).
Con los menores valores propios escogidos y sus respectivos vectores propios, se encuentra la transformación  , la cual genera los canales
, la cual genera los canales  , sin embargo la transformación es aplicada a la señal original, como muestra la ecuación (8).
, sin embargo la transformación es aplicada a la señal original, como muestra la ecuación (8).

Para establecer la presencia de las señales SSVEP se usa un promedio de la relación entre la potencia de la señal SSVEP con respecto a la potencia de las demás señales, este promedio es calculado para cada múltiplo de la frecuencia y para cada canal después de aplicar la transformación, como lo muestra la ecuación (9).

En la frecuencia de interés, para el múltiplo k, la potencia puede ser calculada como se muestra en la ecuación (10).

El cálculo de la potencia sobre las frecuencias restantes se hace mediante un modelo AR(p), el cual se determina sobre los canales resultado de la transformación, pero restando las componentes SSVEP, es decir sobre los canales modificados según la ecuación (11).

Para ajustar el modelo AR(p) se calcula la autocovarianza de cada canal mediante el teorema de Wiener-Khinchin y se procede a resolver la ecuación de Yule-Walker. De esta forma se encuentran la varianza del ruido blanco σ2 y los parámetros α1, α2,…, αp del modelo AR(p).
La potencia de las otras frecuencias para el armónico k se establece entonces con el modelo AR(p) ajustado al canal Sl, teniendo en cuenta los parámetros según la ecuación (12).
Donde i es igual al valor complejo  .
.
El valor de T dado por la ecuación 9 es calculado para todas las frecuencias; cuando alguno de los valores de T supera un umbral preestablecido es porque la frecuencia relacionada tiene una alta potencia en comparación con las otras, por consiguiente, el usuario estaría mirando el estímulo respectivo.
Método
En un espacio abierto se expuso el sistema y se invitó a algunos voluntarios para que lo probaran, en total fueron 32 personas, 5 mujeres y 27 hombres, cuyo rango de edad está entre 18 y 53 años, con edad promedio 28,1 y desviación estándar 10,64, que firmaron el consentimiento para participar en la investigación. A cada uno de los voluntarios se les puso el Emotiv Epoc en la cabeza, rotado 180 grados de su posición normal para contar con 8 electrodos en la parte occipital del cerebro y se revisó que los electrodos presentaran una buena señal. Se les explicó a los voluntarios la forma de mover el avatar en el laberinto. Luego, se daba inicio al software y se grababan los datos. Todos empezaron con el laberinto inicial y, una vez realizado, se pasaba al laberinto libre. Se permitió que los voluntarios manejaran el sistema hasta que decidieran retirarse.
Para todos los voluntarios se usó un tMEC de 3 segundos, un td de 0,25 segundos y un umbral de 4; asimismo se usaron las frecuencias 15 Hz, 12 Hz, 10 Hz y 8,57 Hz para los estímulos correspondientes a los comandos izquierda, arriba, derecha y abajo respectivamente. El valor MEC era calculado tomando los 8 electrodos ubicados en la parte occipital de la cabeza; cuando dicho valor superaba el umbral al menos dos veces en los últimos 4 cálculos, se establecía como seleccionada la frecuencia correspondiente. Una vez detectado el estímulo se esperaban 3 segundos para la recolección de datos antes de realizar un nuevo cálculo.
Todos los parámetros se mantuvieron fijos usando valores establecidos a partir de pruebas previas al evento y no se cambiaron para ninguno de los voluntarios, es decir no se tuvo proceso de calibración sino que se pasó directamente al juego.
Resultados
De los 32 voluntarios, 5 se retiraron antes de terminar el laberinto inicial, en contraposición a 9 que lograron una exactitud del 100 %, en la figura 3 se muestra la distribución de los 32 voluntarios según el rango de precisión.

En la figura 3 se puede observar también que 62,5 % de los voluntarios lograron una precisión mayor al 60 %, sin realizar ningún proceso de calibración, para estos 20 participantes la precisión promedio fue de 79 %.
En la figura 4 se muestra el tiempo máximo, promedio y mínimo alcanzado para la detección de un comando de los voluntarios agrupados según los rangos de precisión.

Se puede notar que para el rango entre 40 % y 100 % el tiempo necesario para detectar un comando aumenta a medida que baja la precisión, posiblemente por la dificultad para producir las señales SSVEP; para una precisión menor a 40 %, el tiempo de detección disminuye nuevamente, sin embargo se debe tener en cuenta que se detectan en un menor tiempo pero con un mayor número de errores. La razón de transferencia de información alcanzada (ITR, por su sigla en inglés) en sus valores máximo, promedio y mínimo, para los voluntarios agrupados según el rango de precisión se muestra en la figura 5. Se puede notar una reducción drástica en el ITR a medida que baja la precisión; esto era de esperarse considerando el aumento en el tiempo necesario para detectar un comando y la disminución en la precisión, se nota también una caída notable menor a 2 bits/min para precisiones menores a 60 %. Agrupando los voluntarios con precisión entre 60 % y 100 % se logró un ITR de 8,78 bits/min.

El voluntario de mejor desempeño, con una precisión de 100 %, logró un tiempo de detección de 3,068 segundos y un ITR de 39,1 bits/min.
Para los 20 participantes de mejor desempeño, que tuvieron una precisión entre 60 % y 100 %, se alcanzaron los valores promedio de precisión de 79 %, un tiempo de detección de comando de 6,4 segundos y una ITR de 8,78 bits/segundo. Para estos 20 voluntarios se muestra la matriz de confusión en la tabla 1 para las 4 frecuencias; esta tabla relaciona el número de veces que se tiene un valor esperado y el respectivo valor detectado.

Al ser un ambiente no controlado, los usuarios realizaban movimientos principalmente de cabeza, pies y manos, a pesar del requerimiento de tratar de no hacerlos; esto puede estar relacionado con que la mayor parte de las detecciones falsas se encuentra en 10 Hz seguida de 12 Hz. Estas dos frecuencias están asociadas a los movimientos y cambian su potencia ante la presencia de estos. Asimismo se nota que el valor esperado contra el obtenido de 12 Hz y 10 Hz tienen la mayor precisión con un 86,6 % y 84,3 %, respectivamente, seguidos de lejos por 8,57 Hz y 15 Hz con 75 % y 71,8 %, respectivamente. Esto podría mostrar la conveniencia de escoger frecuencias cercanas a los 12 Hz y 10 Hz para implementar BCI basados en SSVEP, sin embargo se requiere de más estudios para poder corroborarlo.
Se puede notar en la matriz de confusión que para los valores esperados de 12 Hz y 10 Hz solo se presenta error en los valores vecinos, 15 Hz y 10 Hz para 12 Hz, y 12 Hz y 8.57 Hz para 10 Hz; se necesitan más estudios para determinar si dicha tendencia es generalizada o fue un caso particular de esta prueba.
Conclusiones
Una vez realizada la prueba fuera del laboratorio se pudo comprobar que el sistema BCI basado en SSVEP implementado puede ser usado por personas saludables en un rango amplio de edades, entre 18 y 53 años, donde el 84 % lograron el objetivo del juego sin realizar ningún tipo de calibración. Los resultados podrían mejorar al incluir procedimientos para escoger las frecuencias y umbrales que mejor se ajusten a cada uno de los usuarios.
Se pudo comprobar la viabilidad de interactuar con el computador al enviar comandos interpretados directamente desde la actividad cerebral sin requerir ningún otro método de entrada durante la ejecución del juego, logrando el objetivo sin la intervención de controles convencionales.
El sistema implementado plantea la posibilidad de realizar aplicaciones BCI con lectores de ondas EEG de bajo costo y de fácil instalación al contar con electrodos sin gel. Se pudo comprobar que se pueden obtener buenos resultados a pesar del ruido que aumenta en este tipo de dispositivos.
Las pruebas realizadas en este trabajo fueron llevadas a cabo fuera del laboratorio durante un evento público; las condiciones eran desafiantes por el corto tiempo disponible para las pruebas, las variaciones de iluminación, el ruido circundante y las distracciones. A pesar de las condiciones adversas se logró un buen desempeño para la mayoría de los participantes.
El sistema planteado usa el total de 8 electrodos, una de las mejoras que se puede aplicar al sistema es reducir el número de electrodos usados para el procesamiento al buscar las combinaciones de mejor desempeño. Otras mejoras posibles incluyen rápidos procedimientos de calibración basados en comparar la señal con estímulo ausente y con estímulo presente, buscar las mejores frecuencias y umbrales de forma previa o de forma automática, y probar con diferentes metodologías que permitan aumentar la precisión y el tiempo de detección. Dado que el procedimiento básico aquí planteado funciona parcialmente, es prometedor el desempeño que se puede obtener al implementar diferentes mejoras.
Financiamiento
El artículo fue un resultado derivado del proyecto de investigación "Plataforma robótica para la movilidad asistida de personas con discapacidad", que fue avalado y financiado por la Universidad del Valle.
Referencias
Allison, B.; Graimann, B. y Gräser, A. (13-15 de junio de 2007). Why Use A BCI If You Are Healthy? BRAINPLAY 07. Brain-Computer Interfaces and Games Workshop at ACE (Advances in Computer Entertainment), 1-5. Salzburgo, Austria.
Cheng, M.; Gao, X.; Gao, S. y Dingfeng, X. (octubre de 2002). Design and Implementation of a Brain-Computer Interface with High Transfer Rates. IEEE Transactions on Biomedical Engineering, 49(10), 1181-1186.
Diez, P.F.; Mut, V.A.; Avila P., E. y Laciar L., E. (14 de julio de 2011). Asynchronous BCI control using high-frequency SSVEP. Journal of Neuroengineering and Rehabilitation, 8(39), 1-8.
Edlinger, G. y Guger, C. (1-4 de julio de 2012). A Hybrid Brain-Computer Interface for Improving the Usability of a Smart Home Control. Proceedings of 2012 ICME International Conference on Complex Medical Engineering. Kobe, Japón.
Francois, V.; Monique, M.; Dauwels, J. y Cichocki, A. (2010). Steady-State Visually Evoked Potentials: Focus on Essential Paradigms and Future Perspectives. Progress in Neurobiology, 90, 418-438.
Friman, O.; Volosyak, I. y Gräser, A. (abril de 2007). Multiple Channel Detection of Steady-State Visual Evoked Potentials for Brain-Computer Interfaces. IEEE Transactions on Biomedical Engineering, 54(4).
Hortal, E.; Úbeda, A.; Iánez, E. y Azorín, J.M. (2014). Control of a 2 DoF robot using a Brain-Machine Interface. Computer Methods and Programs in Biomedicine, 116, 169-176.
Hwang, H.J.; Lim, J.H.; Jung, Y.J.; Choi, H. y Woo Lee, S. (30 de junio de 2012). Development of an SSVEP-Based BCI Spelling System Adopting a QWERTY-Style LED Keyboard. Journal of Neuroscience Methods, 59-65.
Hwang, H.J.; Lim, J.H.; Lee, J.H. e Im, C.H. (18-20 de febrero de 2013). Implementation of a Mental Spelling System Based on Steady-State Visual Evoked Potential (SSVEP). International Winter Workshop on Brain-Computer Interface (BCI). Gangwon, Corea del Sur.
Iáñez, E.; Azorín, J.M.; Úbeda, A.; Fernández, J.M. y Fernández, E. (13 de diciembre de 2010). Mental Tasks-Based Brain-Robot Interface. Robotics and Autonomous Systems, 58(12), 1238-1245.
Lim, J.H.; Hwang, H. J. e Im, C.H. (18-20 de febrero de 2013). "Eyes-Closed" SSVEP-Based BCI for Binary Communication of Individuals with Impaired Oculomotor Function. International Winter Workshop on Brain-Computer Interface. Gangwon, Corea del Sur.
Martinez, P.; Bakardjian, H. y Cichock, A. (22 de mayo de 2007). Fully Online Multicommand Brain-Computer Interface with Visual Neurofeedback Using SSVEP Paradigm. Computational Intelligence and Neuroscience, 1-9.
Millán, J.D.; Rupp, R.; Müller Putz, G.R.; Murray Smith, R.; Giugliemma, C.; Tangermann, M. et al. (2010). Combining Brain-Computer Interfaces and Assistive Technologies: State-of-the-Art and Challenges. Frontiers in Neuroscience, 4, 1-15.
Nishifuji, S. y Kuroda, T. (28 de agosto a 1 de septiembre de 2012). Impact of Mental Focus on Steady-State Visually Evoked Potential under Eyes Closed Condition for Binary Brain Computer Interface. 34th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC). San Diego, EE. UU.
Rak, R.J.; Kołodziej, M. y Majkowski, A. (2012). Brain-computer interface as measurement and control system. Metrology and Measurement Systems, XIX(3), 427-444.
Resalat, S.N.; Saba, V. y Afdideh, F. (2-3 de mayo de 2012). A Novel System for Driver's Sleepiness Detection Using SSVEP. 16th CSI International Symposium on Artificial Intelligence and Signal Processing (AISP). Fars, Irán.
Shyu, K.K.; Chiu, Y.J.; Lee, P.L.; Lee, M.H.; Sie, J.J.; Wu, C.H. et al. (julio de 2013). Total Design of an FPGA-Based Brain-Computer Interface Control Hospital Bed Nursing System. IEEE Transactions on Industrial Electronics, 60(7), 2731-2739.
Singla, R. y Haseena, B.A. (julio de 2013). BCI Based Wheelchair Control Using Steady State Visual Evoked Potentials and Support Vector Machines. International Journal of Soft Computing and Engineering (IJSCE), 3(3), 46-52.
Singla, R.; Khosla, A. y Jha, R. (2013). Influence of Stimuli Color on Steady-State Visual Evoked Potentials Based BCI Wheelchair Control. Journal of Biomedical Science and Engineering, 6(11), 1050-1055.
Vliet, M.V.; Robben, A.; Chumerin, N.; Manyakov, N.V.; Combaz, A. y Van Hulle, M.M. (enero 9-11 de 2012). Designing a brain-computer interface controlled video-game using consumer grade EEG hardware. Biosignals and Biorobotics Conference (BRC), 2012 ISSNIP. Manaos, Brasil.
Wolpaw, J.R.; Birbaumer, N.; Heetderks, W.J.; McFarland, D.J.; Peckham, P.H.; Schalk, G. et al. (2000). Brain-Computer Interface Technology: A Review of the First International Meeting. IEEE Transactions on Rehabilitation Engineering, 8(2), 164-173.
Zhang, Y.; Xu, P.; Tiejun, L.; Hu, J.; Zhang, R. y Yao, D. (6 de marzo de 2012). Multiple Frequencies Sequential Coding for SSVEP-Based Brain-Computer Interface. PLoS One, 7(3), 1-9.
Licencia
Esta licencia permite a otros remezclar, adaptar y desarrollar su trabajo incluso con fines comerciales, siempre que le den crédito y concedan licencias para sus nuevas creaciones bajo los mismos términos. Esta licencia a menudo se compara con las licencias de software libre y de código abierto “copyleft”. Todos los trabajos nuevos basados en el tuyo tendrán la misma licencia, por lo que cualquier derivado también permitirá el uso comercial. Esta es la licencia utilizada por Wikipedia y se recomienda para materiales que se beneficiarían al incorporar contenido de Wikipedia y proyectos con licencias similares.
