DOI:
https://doi.org/10.14483/22487638.11566Publicado:
01-02-2017Número:
Vol. 20 Núm. 50 (2016): Octubre - DiciembreSección:
RevisiónOrthomosaics and digital elevation models generated from images taken with UAV systems
Ortomosaicos y modelos digitales de elevación generados a partir de imágenes tomadas con sistemas UAV
Palabras clave:
imágenes aéreas, MDE, nube de puntos, ortomosaicos, UAV. (es).Palabras clave:
aerial images, DSM, orthomosaic, point clouds, UAV. (en).Descargas
Referencias
Adams, S. M., & Friedland, C. J. (2011). A survey of unmanned aerial vehicle (UAV) usage for imagery collection in disaster research and management. In 9th International Workshop on Remote Sensing for Disaster Response (p. 8). Stanford, CA, USA. Retrieved from http://blume.stanford.edu/sites/default/files/RS_Adams_Survey_paper_0.pdf
Aerocivil. (2009). Normas de aeronavegabilidad y operación de aeronaves. In Reglamentos Aeronáuticos de Colombia (p. 660).
Aerocivil. (2015). Requisitos Generales de Aeronavegabilidad y Operaciones para RPAS. Retrieved from https://www.aerocivil.gov.co/AAeronautica/Rrglamentacion/Cirdulares/CircularesReglamentarias/CR-5100-082-002.pdf
Aibotix. (2014). Aibot X6 Multicopter for Mapping and Industry. Retrieved September 5, 2014, from http://www.aibotix.com/
Anai, T., Sasaki, T., Osaragi, K., Yamada, M., Otomo, F., & Otani, H. (2012). Automatic Exterior Orientation Procedure for Low-Cost Uav Photogrammetry Using Video Image Tracking Technique and Gps Information. ISPRS - International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, XXXIX-B7(September), 469–474. doi:10.5194/isprsarchives-XXXIX-B7-469-2012
Arthur, M., Al-Tahir, R., & Davis, D. (2012). Rapid Processing of Unmanned Aerial Vehicles Imagery for Disaster Management. FIG Working Week 2012, (May 2012), 6–10.
Arya, S., Mount, D. M., Netanyahu, N. S., Silverman, R., & Wu, A. Y. (1998). An Optimal Algorithm for Approximate Nearest Neighbor Searching in Fixed Dimensions. Journal of the ACM, 45(6), 1–31.
Barazzetti, L., Brumana, R., Oreni, D., Previtali, M., & Roncoroni, F. (2014). True-orthophoto generation from UAV images: Implementation of a combined photogrammetric and computer vision approach. ISPRS Annals of Photogrammetry, Remote Sensing and Spatial Information Sciences, II-5(June), 57–63. doi:10.5194/isprsannals-II-5-57-2014
Barazzetti, L., Remondino, F., & Scaioni, M. (2010a). Automation in 3D reconstruction: results on different kinds of close-range blocks. International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, XXXVIII(5), 55–61. Retrieved from http://isprsserv.ifp.uni-stuttgart.de/proceedings/XXXVIII/part5/papers/106.pdf
Barazzetti, L., Remondino, F., & Scaioni, M. (2010b). Extraction of accurate tie points for automated pose estimation of close-range blocks. ISPRS Technical Commission III …, XXXVIII(3A), 151–156. Retrieved from http://www.isprs.org/proceedings/xxxviii/part3/a/pdf/151_XXXVIII-part3A.pdf
Barazzetti, L., Scaioni, M., & Remondino, F. (2010). Orientation and 3D modelling from markerless terrestrial images: combining accuracy with automation. The Photogrammetric Record, 25(132), 356–381. Retrieved from http://onlinelibrary.wiley.com/doi/10.1111/j.1477-9730.2010.00599.x/full
Bay, H., Tuytelaars, T., & Gool, L. Van. (2006). SURF : Speeded Up Robust Features. In A. Leonardis, H. Bischof, & A. Pinz (Eds.), Computer Vision – ECCV 2006 (pp. 404–417). Springer Berlin Heidelberg. doi:10.1007/11744023_32
Bendea, H., Boccardo, P., Tonolo, F. G., Marenchino, D., & Piras, M. (2008). Low cost UAV for post-disaster assessment. International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, XXXVII(B8), 1373–1380. Retrieved from http://www.isprs.org/proceedings/XXXVII/congress/8_pdf/14_ThS-20/37.pdf
Berni, J. A. J., Zarco-Tejada, P. J., Suárez, L., González-Dugo, V., & Fereres, E. (2009). Remote sensing of vegetation from UAV platforms using lightweight multispectral and thermal imaging sensors. In C. Heipke, K. Jacobsen, S. Müller, & U. Sörgel (Eds.), ISPRS Hannover Workshop 2009 (p. 6). Hannover, Germany. Retrieved from http://isprsserv.ifp.uni-stuttgart.de/proceedings/XXXVIII/1_4_7-W5/paper/Jimenez_Berni-155.pdf
Bláha, M., Eisenbeiss, H., Grimm, D., & Limpach, P. (2011). Direct georeferencing of UAVs. International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, XXXVIII(1/C22), 131–136. Retrieved from http://www.igp.ethz.ch/photogrammetry/publications/pdf_folder/2011_Direct_Georeferencing_of_UAVS.pdf
Chen, W., & Zhao, Y. (2011). An improved SIFT algorithm for image feature-matching. 2011 International Conference on Multimedia Technology, 197–200. doi:10.1109/ICMT.2011.6003022
Cheng, Y., Xue, D., & Li, Y. (2007). A Fast Mosaic Approach for Remote Sensing Images. 2007 International Conference on Mechatronics and Automation, 2009–2013. doi:10.1109/ICMA.2007.4303859
Chiabrando, F., Nex, F., Piatti, D., & Rinaudo, F. (2011). UAV and RPV systems for photogrammetric surveys in archaelogical areas: two tests in the Piedmont region (Italy). Journal of Archaeological Science, 38(3), 697–710. doi:10.1016/j.jas.2010.10.022
Colomina, I., & Molina, P. (2014). Unmanned aerial systems for photogrammetry and remote sensing: A review. ISPRS Journal of Photogrammetry and Remote Sensing, 92, 79–97. doi:10.1016/j.isprsjprs.2014.02.013
Cramer, M. (1999). Direct Geocoding-is Aerial Triangulation Obsolete? In Photogrammetric Week “99” (pp. 59–70). Retrieved from http://citeseerx.ist.psu.edu/viewdoc/summary?doi=10.1.1.17.3058
Douterloigne, K., Gautama, S., & Philips, W. (2009). Fully automatic and robust UAV camera calibration using chessboard patterns. International Geoscience and Remote Sensing Symposium (IGARSS), 2, 551–554. doi:10.1109/IGARSS.2009.5418141
Eisenbeiss, H. (2009). UAV Photogrammetry. ETH and Institute of Geodesy and Photogrammetry, Zurich.
Eisenbeiss, H., & Zhang, L. (2006). Comparison of DSMs generated from mini UAV imagery and terrestrial laser scanner in a cultural heritage application. International Archives of Photogrammetry, Remote Sensing and Spatial Information Sciences XXXVI-5, 90–96. doi:10.1.1.221.8350
Elaksher, A. (2008). A multi-photo least squares matching algorithm for urban area DEM refinement using breaklines. International Archives of Photogrammetry, Remote Sensing, and Spatial Information Sciences 37, Part B3A, XXXVII(B3a), 33–38. Retrieved from http://www.isprs.org/proceedings/XXXVII/congress/3_pdf/05a.pdf
El-Habrouk, H., Li, X. P., & Faig, W. (1996). Determination of geometric characteristics of a Digital Camera by Self-Calibration. International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, XXXI(B1), 60–64.
Everaerts, J. (2008). The use of unmanned aerial vehicles (UAVs) for remote sensing and mapping. International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, XXXVII(B1), 1187–1192. Retrieved from http://www.isprs.org/proceedings/XXXVII/congress/1_pdf/203.pdf
Fischler, M. A., & Bolles, R. C. (1981). Random Sample Consensus: A Paradigm for Model Fitting with Applications to Image Analysis and Automated Cartography. CACM, 24(6), 381–395.
Forstner, W., & Gulch, E. (1987). A Fast Operator for Detection and Precise Location of Distinct Points, Corners and Centres of Circular Features.pdf. ISPRS Intercommission Workshop, Interlaken.
Furukawa, Y., & Ponce, J. (2007). Accurate, dense, and robust multiview stereopsis. In IEEE Conference on Computer Vision and Pattern Recognition (CVPR) (Vol. 32, pp. 1–8). Minneapolis, USA. doi:10.1109/TPAMI.2009.161
Gehrke, S., Morin, K., & Downey, M. (2010). Semi-global matching: An alternative to LIDAR for DSM generation. International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences. Retrieved from http://www.isprs.org/proceedings/xxxviii/part1/11/11_01_Paper_121.pdf
Gini, R., Pagliari, D., Passoni, D., Pinto, L., Sona, G., & Dosso, P. (2013). UAV PHOTOGRAMMETRY : BLOCK TRIANGULATION COMPARISONS. International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, XL(1/W2), 157–162.
Haala, N. (2011). Multiray Photogrammetry and Dense Image Matching. In D. Fritsch (Ed.), Photogrammetric Week ’11 (pp. 185–195). Stuttgart: Wichmann.
Haala, N., Cramer, M., Weimer, F., & Trittler, M. (2012). Performance Test on Uav-Based Photogrammetric Data Collection. ISPRS - International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, XXXVIII-1/, 7–12. doi:10.5194/isprsarchives-XXXVIII-1-C22-7-2011
Harris, C., & Stephens, M. (1988). A Combined Corner and Edge Detector. Procedings of the Alvey Vision Conference 1988, 147–151. doi:10.5244/C.2.23
Heikkila, J., & Silvén, O. (1997). A four-step camera calibration procedure with implicit image correction. In Conference on Computer Vision and Pattern Recognition (pp. 1106–1112). Retrieved from http://ieeexplore.ieee.org/xpls/abs_all.jsp?arnumber=609468
Hemayed, E. E. E. E. (2003). A survey of camera self-calibration. Proceedings of the IEEE Conference on Advanced Video and Signal Based Surveillance, 2003., 351–357. doi:10.1109/AVSS.2003.1217942
Hirschmuller, H. (2005). Accurate and efficient stereo processing by semi-global matching and mutual information. … Vision and Pattern Recognition, 2005. CVPR …. Retrieved from http://ieeexplore.ieee.org/xpls/abs_all.jsp?arnumber=1467526
Hirschmüller, H. (2008). Stereo processing by semiglobal matching and mutual information. IEEE Transactions on Pattern Analysis and Machine Intelligence, 30(2), 328–41. doi:10.1109/TPAMI.2007.1166
Hirschmüller, H. (2011). Semi-Global Matching Motivation, Developments and Applications. Photogrammetric Week, 173–184. Retrieved from http://www.robotic.dlr.de/fileadmin/robotic/hirschmu/pw2011hh.pdf
Hirschmüller, H., & Bucher, T. (2010). Evaluation of digital surface models by semi-global matching. DGPF Tagungsband. Retrieved from http://www.ifp.uni-stuttgart.de/dgpf/wien/5-HirschmuellerBucher-SemiGlobalMatching.pdf
Höhle, J. (2011). On the potential of new digital aerial cameras for DEM generation. The Photogrammetric Journal of Finland, 22(2), 27–36. Retrieved from http://foto.hut.fi/seura/julkaisut/pjf/pjf_e/2011/PJF2011_Hohle.pdf
ISPRS. (2004). Approved resolutions of the XXth ISPRS Congress - Istanbul 2004. In International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences (Vol. XXXV, p. 40). Istanbul, Turkey.
Juan, L., & Gwun, O. (2009). A comparison of sift, pca-sift and surf. Internat
ional Journal of Image Processing (IJIP), 3(4), 143–152. Retrieved from http://www.cscjournals.org/csc/manuscript/Journals/IJIP/volume3/Issue4/IJIP-5
Junqing, C., Zongjian, L., Xiaojing, W., Yongrong, L., & Acquisition, A. I. (2012). Application of UAV system for low altitude photogrammetry in Shanxi. International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, XXXIX(1), 351–354.
Kohoutek, T., & Eisenbeiss, H. (2012). Processing of UAV based range imaging data to generate detailed elevation models of complex natural structures. International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, XXXIX(September), 405–410. Retrieved from http://www.int-arch-photogramm-remote-sens-spatial-inf-sci.net/XXXIX-B1/405/2012/isprsarchives-XXXIX-B1-405-2012.pdf
Lei, R., Fan, D., Ji, S., & Zhai, H. (2008). Theory and Algorithms of DSM generation from multi-line-array images matching. International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, XXXVII(B4), 337–342. Retrieved from http://www.isprs.org/proceedings/XXXVII/congress/4_pdf/59.pdf
Li, M., Li, D., & Fan, D. (2012). A study on automatic UAV image mosaic method for paroxysmal disaster. International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, XXXIX(B6), 123–128.
Li, X., Liu, Y., Wang, Y., & Yan, D. (2005). Computing Homography with RANSAC Algorithm: A Novel Method of Registration. In C.-S. Li & M. M. Yeung (Eds.), SPIE 5637 (Vol. 5637, pp. 109–112). doi:10.1117/12.579121
Lingua, A., Marenchino, D., & Nex, F. (2009a). 04 - Performance Analysis of the SIFT Operator for Automatic Feature Extraction and Matching in Photogrammetric Applications. Sensors (Basel, Switzerland), 9(5), 3745–66. doi:10.3390/s90503745
Lingua, A., Marenchino, D., & Nex, F. (2009b). A comparison between “ old and new ” feature extraction and matching techniques in Photogrammetry. RevCAD, Journal of Geodesy and Cadastre, 9, 43–52.
Lingua, A., Marenchino, D., & Nex, F. (2009c). Automatic Digital Surface Model (DSM) generation procedure from images acquired by Unmanned Aerial Systems (UASs). RevCAD, Journal of Geodesy and Cadastre, (9), 53–64.
Lowe, D. G. (1999). Object recognition from local scale-invariant features. Proceedings of the Seventh IEEE International Conference on Computer Vision, 2, 1150–1157. doi:10.1109/ICCV.1999.790410
Lowe, D. G. (2004). Distinctive Image Features from Scale-Invariant Keypoints. International Journal of Computer Vision, 60(2), 91–110. doi:10.1023/B:VISI.0000029664.99615.94
Lucieer, A., Robinson, S., & Turner, D. (2011). Unmanned Aerial Vehicle (UAV) remote sensing for hyperspatial terrain mapping of Antarctic Moss beds based on Structure from Motion (SfM) point clouds. Proceeding of the 34th International Symposium on Remote Sensing of Environment, Sydney, Australia, (January 2008), 1–4. Retrieved from http://www.isprs.org/proceedings/2011/ISRSE-34/211104015Final00641.pdf
MarcusUAV. (2014). Personal UAV Systems For Photography, Surveillance and More. Retrieved September 5, 2014, from http://www.marcusuav.com/
Marenchino, D. (2009). Low-cost UAV for the environmental emergency management. Photogrammetric procedures for rapid mapping activities. Ph.D Thesis Politecnico Di Torino, 1–7. Retrieved from http://citeseerx.ist.psu.edu/viewdoc/download?doi=10.1.1.329.9625&rep=rep1&type=pdf
Microdrones. (2014). UAV Solutions for Mapping, Unmanned Cargo and Inspection Tasks. Retrieved September 5, 2014, from http://www.microdrones.com/en/home/
Mikolajczyk, K., & Schmid, C. (2005). Performance evaluation of local descriptors. IEEE Transactions on Pattern Analysis and Machine Intelligence, 27(10), 1615–1630. doi:10.1109/TPAMI.2005.188
Mundy, J. L. (1993). The relationship between photogrammetry and computer vision. Integrating Photogrammetric Techniques With Scene Analysis and Machine Vision, 1944 of SP.
Neitzel, F., & Klonowski, J. (2011). Mobile 3D mapping with a low-cost UAV system. International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, XXXVIII, 1–6. Retrieved from http://143.93.114.105/sites/default/files/public/data/uav-g_neitzel_klonowski.pdf
Nex, F., & Remondino, F. (2013). UAV for 3D mapping applications: a review. Applied Geomatics, 6(1), 1–15. doi:10.1007/s12518-013-0120-x
Niethammer, U., James, M. R. R., Rothmund, S., Travelletti, J., & Joswig, M. (2011). UAV-based remote sensing of the Super-Sauze landslide: Evaluation and results. Engineering Geology, 128, 2–11. doi:10.1016/j.enggeo.2011.03.012
Niethammer, U., Rothmund, S., James, M. R., Travelletti, J., & Joswig, M. (2010). UAV-BASED REMOTE SENSING OF LANDSLIDES. International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, XXXVIII(5), 496–501.
Nizam Tahar, K., & Ahmad, A. (2013). An Evaluation of Fixed Wing and Multi-Rotor UAV Images using Photogrammetric Image Processing. World Academy of Science, Engineering and Technology, 7, 346–350. Retrieved from http://waset.org/publications/11861/an-evaluation-on-fixed-wing-and-multi-rotor-uav-images-using-photogrammetric-image-processing
Pfeifer, N., Glira, P., & Briese, C. (2012). Direct Georeferencing With on Board Navigation Components of Light Weight Uav Platforms. ISPRS - International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, XXXIX-B7(September), 487–492. doi:10.5194/isprsarchives-XXXIX-B7-487-2012
Remondino, F., & Fraser, C. (2006). Digital camera calibration methods: Considerations and comparisons. International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, 36(5), 266–272.
Remondino, F., Pizzo, S. Del, Kersten, T. P., & Troisi, S. (2012). Low-Cost and Open-Source Solutions for Automated Image Orientation - A Critical Overview. In Progress in Cultural Heritage Preservation (Vol. 2012, pp. 40–54). Springer Berlin Heidelberg. doi:10.1007/978-3-642-34234-9_5
Romero, A. M., & Cazorla, M. (2009). Comparativa de detectores de caractersticas visuales y su aplicación al SLAM. X Workshop de Agentes Físicos, Septiembre 2009, 55–62. Retrieved from http://scholar.google.com/scholar?hl=en&btnG=Search&q=intitle:Comparativa+de+detectores+de+caractersticas+visuales+y+su+aplicaci+´+on+al+SLAM#0
Roncella, R., Re, C., & Forlani, G. (2011). Comparison of two structure and motion strategies. International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, XXXVIII, 343–350.
Rosnell, T., & Honkavaara, E. (2012). Point cloud generation from aerial image data acquired by a quadrocopter type micro unmanned aerial vehicle and a digital still camera. Sensors (Basel, Switzerland), 12(1), 453–480. doi:10.3390/s120100453
Rumpler, M., Wendel, A., & Bischof, H. (2013). Probabilistic Range Image Integration for DSM and True-Orthophoto Generation. In J.-K. Kämäräinen & M. Koskela (Eds.), Image Analysis (Vol. 7944, pp. 533–544). Espoo, Finland: Springer Berlin Heidelberg. doi:10.1007/978-3-642-38886-6_50
Salvo, G., Caruso, L., & Scordo, A. (2014). Urban Traffic Analysis through an UAV. Procedia - Social and Behavioral Sciences, 111, 1083–1091. doi:10.1016/j.sbspro.2014.01.143
Samad, A. M., Kamarulzaman, N., Hamdani, M. A., Mastor, T. A., & Hashim, K. A. (2013). The potential of Unmanned Aerial Vehicle (UAV) for civilian and mapping application. In 2013 IEEE 3rd International Conference on System Engineering and Technology (pp. 313–318). Shah Alam, Malaysia: Ieee. doi:10.1109/ICSEngT.2013.6650191
Sensefly. (2014). Professional Mapping Drones, Flight Planning & Control, Maps and 3D Models. Retrieved September 5, 2014, from https://www.sensefly.com/home.html
Shi, J., Wang, J., & Xu, Y. (2011). Object-Based Change Detection Using Georeferenced Uav Images. ISPRS - International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, XXXVIII-1/(1/C22), 177–182. doi:10.5194/isprsarchives-XXXVIII-1-C22-177-2011
Snavely, N., Seitz, S. M., & Szeliski, R. (2007). Modeling the World from Internet Photo Collections. International Journal of Computer Vision, 80(2), 189–210. doi:10.1007/s11263-007-0107-3
Tang, L., Braun, J., & Debitsch, R. (1997). Automatic aerotriangulation — concept, realization and results. ISPRS Journal of Photogrammetry and Remote Sensing, 52(3), 122–131. doi:10.1016/S0924-2716(97)00012-9
Triggs, B., McLauchlan, P., Hartley, R., & Fitzgibbon, A. (1999). Bundle adjustment—a modern synthesis. Vision Algorithms ’99, 1–71. Retrieved from http://link.springer.com/chapter/10.1007/3-540-44480-7_21
Trimble. (2014). Trimble UX5 Aerial Imaging Rover. Retrieved September 5, 2014, from http://www.trimble.com/Survey/ux5.aspx
Turner, D., Lucieer, A., & Wallace, L. (2014). Direct Georeferencing of Ultrahigh-Resolution UAV Imagery. IEEE Transactions on Geoscience and Remote Sensing, 52(5), 2738–2745. doi:10.1109/TGRS.2013.2265295
Turner, D., Lucieer, A., & Watson, C. (2012). An Automated Technique for Generating Georectified Mosaics from Ultra-High Resolution Unmanned Aerial Vehicle (UAV) Imagery, Based on Structure from Motion (SfM) Point Clouds. Remote Sensing, 4(12), 1392–1410. doi:10.3390/rs4051392
Udin, W. S., & Ahmad, A. (2011). Calibration of high resolution digital camera using self-calibration bundle adjustment method. In 2011 IEEE 7th International Colloquium on Signal Processing and its Applications (Vol. 1, pp. 137–141). Ieee. doi:10.1109/CSPA.2011.5759859
Udin, W. S., Hassan, A. F., Ahmad, A., & Tahar, K. N. (2012). Digital Terrain Model extraction using digital aerial imagery of Unmanned Aerial Vehicle. 2012 IEEE 8th International Colloquium on Signal Processing and Its Applications, 272–275. doi:10.1109/CSPA.2012.6194732
Vallet, J., Panissod, F., Strecha, C., & Tracol, M. (2012). Photogrammetric Performance of an Ultra Light Weight Swinglet “Uav.” ISPRS - International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, XXXVIII-1/, 253–258. doi:10.5194/isprsarchives-XXXVIII-1-C22-253-2011
Watts, A. C., Ambrosia, V. G., & Hinkley, E. A. (2012). Unmanned Aircraft Systems in Remote Sensing and Scientific Research: Classification and Considerations of Use. Remote Sensing, 4(12), 1671–1692. doi:10.3390/rs4061671
Westoby, M. J., Brasington, J., Glasser, N. F., Hambrey, M. J., & Reynolds, J. M. (2012). “Structure-from-Motion” photogrammetry: A low-cost, effective tool for geoscience applications. Geomorphology, 179, 300–314. doi:10.1016/j.geomorph.2012.08.021
Wiggenhagen, M. (2002). Calibration of Digital Consumer Cameras for Photogrammetric Applications. In ISPRS Commission III, Symposium 2002 (p. 6). Graz, Austria.
Xiang, H., & Tian, L. (2011). Development of a low-cost agricultural remote sensing system based on an autonomous unmanned aerial vehicle (UAV). Biosystems Engineering, 108(2), 174–190. doi:10.1016/j.biosystemseng.2010.11.010
Xie, F., Lin, Z., Gui, D., & Lin, H. (2012). Study on Construction of 3D Building Based on Uav Images. ISPRS - International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, XXXIX-B1(September), 469–473. doi:10.5194/isprsarchives-XXXIX-B1-469-2012
Yahyanejad, S., Quaritsch, M., & Rinner, B. (2011). Incremental, orthorectified and loop-independent mosaicking of aerial images taken by micro UAVs. 2011 IEEE International Symposium on Robotic and Sensors Environments (ROSE), 137–142. doi:10.1109/ROSE.2011.6058531
Zhang, Z. (2000). A Flexible New Technique for Camera Calibration. IEEE Transactions on Pattern Analysis and Machine Intelligence, 22(11), 1330–1334.
Zhang, Z. (2004). Camera calibration. In Emerging Topics in Computer Vision (pp. 4–43). Retrieved from http://www.inf.ethz.ch/personal/pomarc/pubs/KangMedioniBook.pdf
Zuliani, M. (2012). RANSAC for Dummies. Retrieved from http://vision.ece.ucsb.edu/~zuliani/Research/RANSAC/RANSAC.shtml
Cómo citar
APA
ACM
ACS
ABNT
Chicago
Harvard
IEEE
MLA
Turabian
Vancouver
Descargar cita
doi: http://dx.doi.org/10.14483/udistrital.jour.tecnura.2016.4.a09
Ortomosaicos y modelos digitales de elevación generados a partir de imágenes tomadas con sistemas UAV
Orthomosaics and digital elevation models generated from images taken with UAV systems
Jesús Orlando Escalante Torrado1, Jhon Jairo Cáceres Jiménez2, Hernán Porras Díaz3
1 Ingeniero civil, estudiante de Maestría en Ingeniería Civil, investigador Grupo Geomática, Universidad Industrial de Santander. Bucaramanga, Colombia. Contacto: jescalto@uis.edu.co
2 Ingeniero de sistemas, doctor en Ingeniería Civil y Costera, docente e investigador de la Universidad Industrial de Santander. Bucaramanga, Colombia. Contacto: jcaceres@uis.edu.co
3 Ingeniero civil, doctor en Ingeniería Telemática, director Grupo Geomática, Universidad Industrial de Santander. Bucaramanga, Colombia. Contacto: hporras@uis.edu.co
Fecha de recepción: 8 de febrero de 2016 Fecha de aceptación: 10 de septiembre de 2016
Cómo citar: Escalante T., J.O.; Cáceres J., J.J. y Porras D., H. (2016). Ortomosaicos y modelos digitales de elevación generados a partir de imágenes tomadas con sistemas UAV. Revista Tecnura, 20(50), 119-140. doi: 10.14483/udistrital.jour.tecnura.2016.4.a09
RESUMEN
Contexto: Actualmente, los vehículos aéreos no tripulados (UAV por su sigla en inglés) son una de las herramientas tecnológicas de mayor investigación y aplicación en áreas como la fotogrametría aérea y de percepción remota, presentándose como una importante alternativa para la captura de imágenes de alta resolución espacial y temporal. Sin embargo, las características de vuelo, de las imágenes y de los sensores utilizados en los UAV generan grandes desafíos en el procesamiento tradicional para la generación de productos cartográficos como modelos digitales de elevación y ortomosaicos, por lo que se requiere de la identificación de nuevas estrategias de procesamiento.
Método: En el presente artículo se realiza una revisión bibliográfica de las principales características de los UAV empleados en fotogrametría aérea junto con las estrategias de procesamiento afines que actualmente se están empleando en áreas como visión por computador y fotogrametría.
Resultados: A partir de la revisión se observa que las estrategias de procesamiento en el área de visión por computador son más afines con la información capturada con los sistemas UAV para la generación de modelos digitales de elevación y ortomosaicos.
Conclusiones: Los adelantos tecnológicos de los sistemas UAV y los avances en las estrategias de procesamiento de grandes volúmenes de datos seguirán impulsando la investigación y aplicación de estos sistemas en áreas como la fotogrametría y visión por computador, para la generación de productos cartográficos de mayor precisión.
Palabras Clave: imágenes aéreas, MDE, nube de puntos, ortomosaicos, UAV.
ABSTRACT
Context: Nowadays, Unmanned Aerial Vehicles (UAVs) are among the technological tools most researched and applied in areas such as aerial photogrammetry and remote sensing, presenting itself as an important alternative for capturing imagery with high spatial and temporal resolution. However, UAV flight parameters, image and sensor characteristics, result on major challenges for traditional processing for producing mapping products such as digital elevation models and orthomosaics, that is why it is required to identify new processing strategies.
Method: In this paper, a review of the main characteristics of UAVs used in aerial photogrammetry is done, along with related processing strategies currently being used in areas such as computer vision and photogrammetry.
Results: From this review, it is shown that processing strategies in the area of computer vision are more akin to the information captured with UAV systems for generating digital elevation models and orthomosaics.
Conclusions: The technological advances in UAVs systems and advances in strategies for processing large data volumes continue to drive research and application of these systems for the generation of mapping products more accurately in areas such as photogrammetry and computer vision.
Keywords: aerial images, DSM, orthomosaic, point clouds, UAV.
INTRODUCCIÓN
Actualmente, la comunidad fotogramétrica y de percepción remota establece y promueve el uso de los vehículos aéreos no tripulados o sistemas UAV (por sus siglas en inglés) como una nueva y confiable alternativa de bajo costo para la adquisición de imágenes aéreas (ISPRS, 2004). Estos sistemas que han sido desarrollados y empleados desde finales de los años cincuenta en el campo militar para tareas de reconocimiento, vigilancia y misiones en territorios hostiles, hoy en día forman parte también de actividades civiles de monitoreo, mediciones atmosféricas, evaluación de daños, agricultura, mapeo y cartografía entre otras (Bendea et al., 2008; Chiabrando, Nex, Piatti y Rinaudo, 2011). Por lo general los sistemas UAV se componen de dos elementos principales: una plataforma aérea, equipada con una cámara y un sistema de navegación, y un centro de control en tierra desde donde se programa y monitorea la actividad aérea. Desde el punto de vista de la fotogrametría y de sensores remotos, las grandes ventajas que estos sistemas ofrecen, en comparación con las plataformas tradicionales como satélites y aviones tripulados, tienen que ver con: la obtención de imágenes de alta resolución espacial y temporal, los bajos costos de adquisición y de operación, el uso en ambientes peligrosos para el ser humano, la ausencia de una tripulación, la respuesta rápida y las pocas restricciones de vuelo en la mayoría de países (Shi, Wang y Xu, 2011; Xiang y Tian, 2011).
Gracias a estas ventajas, los sistemas UAV han cumplido un papel importante en investigación en aspectos tan diversos como: atención de emergencias (Adams y Friedland, 2011; Arthur, Al-Tahir y Davis, 2012), geología (Li, Li y Fan, 2012), arqueología (Chiabrando et al., 2011), agricultura (Xiang y Tian, 2011), ciudades digitales 3D (Xie, Lin, Gui y Lin, 2012) y tráfico urbano (Salvo, Caruso y Scordo, 2014), entre otros.
Por lo general, las aplicaciones más importantes de sistemas UAV en áreas como la fotogrametría y de percepción remota han sido la generación de productos cartográficos y de modelos tridimensionales. Esto ha sido posible con el aporte de estrategias de procesamiento desarrolladas en áreas como la de visión por computador y de fotogrametría de rango cercano (Hartley y Mundy, 1993). De acuerdo con esto, en el presente artículo se presenta una revisión general de las estrategias que están siendo empleadas para la generación de nubes de puntos, de modelos digitales de elevación y de ortomosaicos a partir del procesamiento de imágenes UAV.
En este documento se presenta un recorrido por las etapas llevadas a cabo en un levantamiento de fotogrametría aérea con sistemas UAV, iniciando con una descripción de la etapa de captura de datos, de los sistemas UAV y de las actividades de planeación de vuelos y adquisición de imágenes. Luego se presenta la revisión de las estrategias de procesamiento que están siendo empleadas e investigadas en torno a las imágenes tomadas con sistemas UAV. En esta sección se hace un recorrido por las etapas de procesamiento identificadas en la bibliografía para la generación de modelos digitales de elevación y ortomosaicos. Por último, se establecen algunas ideas a manera de conclusión.
RECOLECCIÓN DE DATOS
La recolección de datos para levantamientos de fotogrametría con sistemas UAV consiste en la captura de imágenes aéreas a lo largo de una ruta de vuelo que es ajustada a unos parámetros previamente definidos. En esta sección se lleva a cabo una revisión de las plataformas y sensores, así como de las actividades necesarias para la recolección de datos.
A continuación se presentan las características principales de las plataformas UAV, las ventajas de su uso, los tipos de plataformas existentes, la mención de algunos sensores que están siendo acoplados a las plataformas y las organizaciones asociadas a los sistemas UAV. Más adelante se indican los pasos requeridos en la planeación de un vuelo para la adquisición de imágenes con sistemas UAV.
Vehículos aéreos no tripulados (UAV)
Los vehículos aéreos no tripulados, o sistemas UAV, también llamados UVS (sistema de vehículo no tripulado) o UAS (sistema de aeronave no tripulada), son aeronaves que vuelan autónomamente a través de un sistema de piloto automático que es monitoreado desde un centro de control en tierra (Everaerts, 2008). En el Committee of Standards "Lexicon of UAV/ROA Terminology AIAA (2004) (como se citó en Chiabrando et al., 2011) se define los UAV como
[...] aeronaves que están diseñadas o modificadas para no llevar un piloto humano y que son operadas a través de comandos electrónicos iniciados por el controlador de vuelo o por un sistema de control de gestión de vuelo autónomo a bordo que no requiere la intervención del controlador de vuelo (p. 697).
El uso de estas plataformas aéreas tuvo inicio en el campo militar en los años cincuenta con tareas de reconocimiento, vigilancia, mapeo y misiones en territorios hostiles. Sin embargo, los primeros usos en aplicaciones geomáticas tuvo lugar a comienzos de los años ochenta, y solo recientemente los sistemas UAV han llegado a ser de uso común en estas aplicaciones al punto de llegar a ser actualmente una alternativa a las plataformas aéreas tripuladas para la adquisición de imágenes (Nex y Remondino, 2013). Colomina y Molina (2014) presentan tabulada la cantidad de plataformas UAV referenciadas en el periodo 2005-2013 a nivel mundial, notándose el mayor aumento en los temas de producción y desarrollo de plataformas (207 en 2005 a 540 en 2013) y el uso en aplicaciones de uso civil y comercial (55 en 2005 a 247 en 2013).
En el desarrollo de plataformas UAV, una gran cantidad de investigaciones han realizado la captura de datos partir de prototipos UAV no comerciales como el "Pelican" (Marenchino, 2009), el Quanta-H y G (Berni et al., 2009) o el "NEO S-300" (Kohoutek y Eisenbeiss, 2012). Mientras que en el uso comercial compañías privadas con plataformas más sofisticadas, mencionadas más adelante, ofrecen productos fotogramétricos (modelos digitales de superficie y ortomosaicos) generados a partir de la información recolectada con estos sistemas (Nex y Remondino, 2013).
Clasificación de plataformas UAV
Actualmente debido a la gran cantidad de plataformas aéreas consideradas UAV, se presentan diferentes maneras para clasificarlas. Estas pueden ser: por tamaño, por capacidad de carga, por altura de vuelo, por autonomía de vuelo o por tipo de misión, entre otras. En el contexto de la adquisición de datos fotogramétricos una clasificación representativa es la de por tipo de plataforma, ya que esta define la forma de vuelo, y por tanto, las áreas más apropiadas de aplicación. De acuerdo con el tipo de plataforma UAV se presentan dos tipos (figura 1): de ala fija o tipo avión (Marenchino, 2009; Vallet, Panissod, Strecha y Tracol, 2012), y multirrotor, de ala rotatoria o tipo helicóptero (Niethammer et al., 2010; Yahyanejad, Quaritsch y Rinner, 2011). Watts, Ambrosia y Hinkley (2012) presentan una revisión amplia de los diferentes modelos de plataformas UAV y el nivel de complejidad de estas, de acuerdo con las áreas de aplicación.

Las ventajas que ofrece cada una de las plataformas dependen del caso de uso. Nizam Tahar y Ahmad (2013) compararon el uso de una plataforma UAV de ala fija y una multirrotor en la generación de un modelo digital de pendientes. En esa investigación se determinó que las mayores diferencias son el menor costo de la plataforma multirrotor, y la leve mejora en la precisión de los resultados de esta plataforma, que en la investigación puede estar asociado a la diferencia de altura en la toma de datos (80 m y 320 m para el UAV multirrotor y el de ala fija, respectivamente). En tanto que la plataforma de ala fija presentó un menor consumo de tiempo en las etapas de captura y procesamiento de las imágenes, por lo que para el uso mencionado se puede establecer que las dos plataformas son igualmente apropiadas.
Sin embargo, el modo de vuelo de estas dos plataformas determina que para espacios reducidos, registro fotográfico a baja altura o modelamiento 3D de objetos, las plataformas multirrotor son las apropiadas, mientras que el registro de grandes extensiones y vuelos a mediana y gran altura, las plataformas de ala fija presentan mayores ventajas.
Con respecto a cómo se compone un sistema UAV estándar empleado en actividades fotogramétricas, se pueden definir dos elementos principales: una plataforma aérea y un centro de control en tierra, enlazados a través de una señal de radiocomunicación. La plataforma aérea está equipada generalmente con un sistema de navegación o piloto automático que permite la navegación autónoma, siguiendo una ruta de vuelo predefinida por el usuario desde la estación de control en tierra.
Esta navegación autónoma es posible por medio de la integración de un sistema inercial y un sistema GPS en la plataforma aérea, que permiten conocer la postura y posición de esta durante el vuelo. Esta información es enviada en tiempo real a la estación de control desde donde se realiza el seguimiento de la plataforma. En el caso de la ausencia de un sistema de navegación, el uso de un control remoto es la única manera de dirigir la plataforma aérea, aunque el control remoto también puede servir como complemento del sistema de navegación en momentos como el despegue y descenso del UAV.
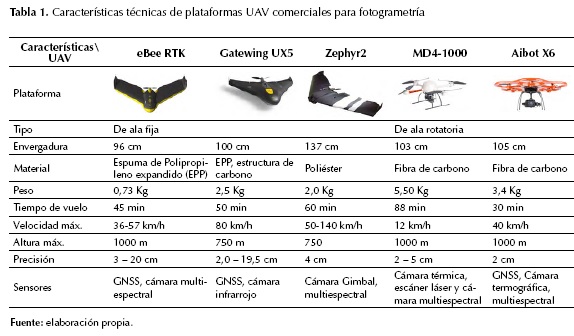
En el caso de plataformas UAV más sofisticadas, actualmente se encuentran sistemas que permiten la vinculación con receptores GNSS como el eBee RTK (Sensefly, 2014), el Gatewing UX5 (Trimble, 2014), en los que la plataforma se conecta a una estación base en tierra y desde esta se trasmiten datos de corrección de posición a la plataforma, permitiendo que las imágenes capturadas tengan asociada una posición de alta precisión; la inclusión de cámaras multiespectrales como en el eBee Ag (Sensefly, 2014) y el MD4-1000 (Microdrones, 2014) en donde bandas espectrales como el infrarrojo y el infrarrojo cercano son empleadas para agricultura; la transmisión de video en tiempo real como el Aibot X6 (Aibotix, 2014); o la implementación de cámaras giroestabilizadas y de tipo Gimbal como el Zephyr2 UAV (MarcusUAV, 2014). En la tabla 1 se presentan en paralelo las características más importantes de estas plataformas UAV consideradas comerciales, en donde los aspectos a tener en cuenta son el tipo de plataforma, el tiempo de vuelo y los sensores acoplables.
Organizaciones relacionadas y reguladoras de los sistemas UAV
Aunque actualmente no existe una reglamentación internacional para el uso y aplicación de los sistemas UAV, organismos nacionales como la Organización Nacional FFA y el Instituto Americano de Aeronáutica y Astronáutica (AIAA), en Estados Unidos, o entidades internacionales como la Organización Europea para la Seguridad de la Navegación Aérea (Eurocontrol), la Agencia Europea de Seguridad Aérea (EASA) y la Organización de Aviación Civil Internacional (ICAO), dirigida por las Naciones Unidas, así como regulaciones nacionales principalmente en países europeos (Nex y Remondino, 2013), se han encargado de definir políticas relacionadas con la seguridad y la incursión de estos sistemas en el espacio aéreo. Por otro lado, organismos como la Sociedad Internacional y la Sociedad Americana de Fotogrametría y Sensores Remotos (ISPRS y ASPRS, por sus siglas en inglés, respectivamente) y la comunidad académica en general, se han encargado de identificar nuevas áreas de investigación y de aplicación, así como de intentar establecer normativas orientadas a definir los estándares de calidad en la toma de información y en los resultados del procesamiento de la información tomada con sistemas UAV.
Por su parte, en Colombia, la Aeronáutica Civil, la autoridad que dicta la reglamentación en la aviación, a través del Reglamento Aeronáutico de Colombia (Aerocivil, 2009) en el numeral 4.25.8.2. Allí se establece que no hay ninguna prohibición en el uso de vehículos aéreos no tripulados para teledetección, fotografía o televisión; sin embargo, su uso debe estar sujeto a las limitaciones impuestas en las actividades de aeromodelismo. No obstante, recientemente a través de la circular reglamentaria No. 002, publicada en el Diario Oficial No. 49.624 (Aerocivil, 2015) se han definido explícitamente los requisitos de aeronavegabilidad y operación de sistemas UAV en actividades diferentes a las de recreación y deporte.
Planeación de vuelo y adquisición de imágenes
Esta etapa consiste en definir la región de interés y los parámetros de vuelo para la adquisición de las imágenes. Las plataformas UAV con un sistema de navegación cuentan, en su estación de control en tierra, con un software específico para realizar esta etapa. Independientemente del software y del tipo de plataforma UAV (tipo avión o tipo helicóptero) los pasos que se siguen para la planeación son básicamente los mismos.
En un vuelo en modo autónomo, la planeación inicia con la definición de una región de interés, generalmente dibujada sobre un mapa base georreferenciado (por ejemplo, Google Earth®). Para el caso de un vuelo en modo manual (maniobrado con control remoto), la definición de la región dependerá de la dirección dada a la plataforma aérea con el control remoto por parte del operador de vuelo.
Una vez se define la región de interés, es necesario ingresar los parámetros de vuelo y, a partir de esta información, el software calcula automáticamente las líneas de vuelo. Los parámetros de vuelo requeridos son: la altura de vuelo o alternativamente el GSD (ground sample distance) y los porcentajes de traslape entre imágenes (longitudinal y transversalmente). Para el caso de sistemas UAV los porcentajes de traslape considerados apropiados varían entre 60-80 % o más, según el nivel de detalle requerido. En el caso de la altura de vuelo que está relacionada con el GSD (medido en cm/pixel), alturas grandes generan GSD grandes (menor resolución), mientras que alturas de vuelo bajas generan GSD pequeños (mayor resolución). En la generación de modelos 3D detallados por lo general se requiere de alturas de vuelo bajas y de altos porcentajes de traslape (Nex y Remondino, 2013).
En el caso de vuelos en modo manual, sin sistema de navegación, los valores de altura y porcentajes de traslape quedan a consideración del operador de vuelo a través del control remoto, o a través de la configuración de la cámara para tomar fotos en intervalos de tiempo fijos (Neitzel y Klonowski, 2011).
Adquisición de imágenes
Luego de la etapa de planeación, el siguiente paso es la ejecución del vuelo para la adquisición de las imágenes, esto inicia con el lanzamiento de la plataforma aérea. Las plataformas tipo avión requieren de un lanzamiento manual o por medio de catapultas, mientras que en las plataformas tipo helicóptero o multirrotor el despegue se realiza automáticamente.
Por medio del sistema de navegación la plataforma aérea busca autónomamente el inicio de la ruta de vuelo programada y da inicio a la captura de las imágenes de manera secuencial de acuerdo con los parámetros establecidos. Mientras tanto, en la estación de control en tierra se monitorea el estado del vuelo y de la plataforma a través de información como tiempo de vuelo, nivel de batería, temperatura e intensidad de la señal de comunicación. Igualmente es posible ajustar los parámetros de vuelo en tiempo real.
Otra de las características que se presenta en la adquisición de imágenes con sistemas UAV es la vinculación de cada foto con los valores de posición y orientación, registrados con los sistemas GPS e inercial en el momento de la captura. Esta es información que puede ser utilizada en las etapas posteriores de procesamiento.
Por otra parte, con respecto a las características de las imágenes capturadas, Turner, Lucieer y Watson (2012) hacen mención de las diferencias fundamentales que presentan las imágenes capturadas con sistemas UAV con respecto a las plataformas aéreas tripuladas: la altura de vuelo de los UAV es baja en relación con la variación de altura dentro de la escena registrada, lo que causa grandes distorsiones perspectivas, y por tanto influye negativamente en el ejercicio estereoscópico; la inestabilidad de la plataforma UAV que causa líneas de vuelo irregulares, y como efecto genera áreas de traslape variable entre imágenes, así como grandes variaciones angulares y rotacionales (ángulos en plataformas UAV de hasta 15° con la horizontal, mientras en fotogrametría tradicional el máximo permitido es 3°); y diferencias de escala y de iluminación entre imágenes adyacentes, que dificulta identificar elementos comunes entre ellas.
Debido a estas diferencias, el procesamiento de imágenes UAV debe ser diferente. Por tanto, es necesario implementar estrategias de procesamiento alternativas a las empleadas en fotogrametría tradicional, que tengan en cuenta las características de las imágenes UAV. Algunas de estas estrategias serán presentadas a continuación.
PROCESAMIENTO DE IMÁGENES UAV
El uso de sistemas UAV para fotogrametría, o fotogrametría UAV, como lo define Eisenbeiss (2009), describe las plataformas de medición fotogramétrica que son operadas remotamente, de manera autónoma o semiautónoma sin un piloto, así como el procesamiento de las imágenes tomadas con estas plataformas. En la fotogrametría UAV se identifican dos productos cartográficos tradicionales: los modelos digitales de superficie y los ortomosaicos georreferenciados (Nex y Remondino, 2013; Colomina y Molina, 2014).
El modelo digital de superficie (DSM) representa la información de altura de la superficie de la Tierra asociada a un sistema de referencia global, de todos los elementos registrados en la escena, es decir considerando las alturas de edificaciones, vegetación y demás objetos presentes en la superficie (Rumpler, Wendel y Bischof, 2013). Estos DSM son empleados para la generación de modelos digitales del terreno (DTM), que son aquellos en los que se han eliminado las elevaciones que no corresponden al terreno como también para la producción de ortoimágenes reales, el reconocimiento automático y extracción de edificios, el análisis de redes de comunicación, el modelamiento urbano, la simulación de desastres naturales, la planeación de vuelos, los estudios ambientales y las visualizaciones fotorrealistas en 3D, entre otras actividades (Lei, Fan, Ji y Zhai, 2008; Elaksher, 2008; Rumpler et al., 2013).
Por otra parte, un mosaico corresponde al conjunto de imágenes tomadas desde una o varias cámaras, que presentan áreas de traslape entre sí, y que son unidas y combinadas en una sola imagen para ampliar el rango de visión de la escena (Cheng, Xue y Li, 2007). Cuando el mosaico es corregido de las distorsiones causadas por el relieve del terreno y los objetos en él, se denomina ortomosaico.
En el procesamiento de imágenes UAV para la generación de estos productos cartográficos, se combinan estrategias empleadas en fotogrametría tradicional y en visión por computador. Por tanto, se cuenta con una diversa cantidad de métodos. A pesar de que algunas investigaciones establecen que emplear software comercial no es apropiado (Arthur et al., 2012), debido a que estos están basados en fotogrametría tradicional, y a que en la fotogrametría UAV no se presentan las condiciones estereoscópicas normales que esta requiere, Gini et al. (2013) concluyen que las imágenes tomadas con sistemas UAV son aptas para ser procesadas por diferentes software fotogramétricos, incluyendo aquellos que son considerados tradicionales.
En resumen, el procesamiento llevado a cabo luego de la captura de datos se caracteriza por tres etapas principales: primera, la configuración del bloque fotogramétrico (véase "Configuración del bloque fotogramétrico"), en donde el objetivo es determinar la información que recrea la escena en el momento de la captura de las imágenes (datos de orientación exterior e interior de la cámara y los puntos que relacionan las imágenes entre sí); segunda, la reconstrucción 3D de la escena (véase "Reconstrucción de escenas 3D") a partir de la extracción de una nube de puntos, y tercera, la generación del modelo digital de superficie y la ortorrectificación de las imágenes a partir de este (véase "Modelo digital de elevaciones y ortorrectificación").
En la primera etapa (véase "Extracción y correlación de características (feature extraction and matching)") se lleva a cabo una de las estrategias principales de procesamiento en fotogrametría que es la extracción y correlación de puntos comunes entre las imágenes. Esto permite conocer la orientación relativa entre imágenes y las áreas comunes registradas del terreno. Otras dos estrategias en esta etapa corresponden a determinar los datos de orientación interna y externa, a través de la calibración y orientación de imágenes, respectivamente (véase "Calibración de cámaras y orientación de imágenes"). Estas dos últimas estrategias se identifican como opcionales en algunas investigaciones mencionadas más adelante.
En la segunda etapa, el objetivo es determinar las coordenadas del terreno de cada uno de los puntos comunes extraídos de las imágenes (véase "Generación de puntos 3D") y posteriormente determinar las coordenadas del terreno para cada uno de los pixeles en las imágenes a través de lo que se denomina densificación de nube de puntos (véase "Densificación de nube de puntos").
Finalmente, en "Modelo digital de elevaciones y ortorrectificación" se presentan las estrategias para la generación del modelo digital del terreno a partir de la rasterización de la nube de puntos, y la ortorrectificación a partir del DSM generado, el cual permite la eliminación de la distorsión en las imágenes generada por el relieve.
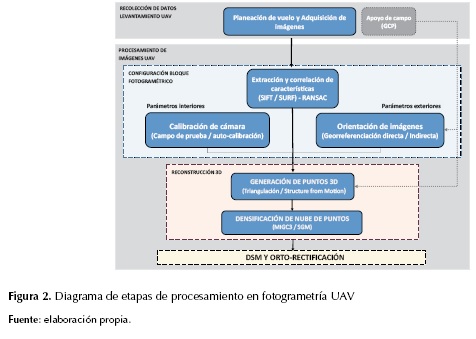
En la figura 2, se presenta un diagrama con las etapas y estrategias de procesamiento mencionadas, que son de uso común en la bibliografía y que serán abordadas, con más detalle, a continuación.
Configuración del bloque fotogramétrico
En un levantamiento de fotogrametría aérea con sistemas UAV, el conjunto de datos que conforman un bloque fotogramétrico corresponde a las imágenes capturadas en un vuelo y los parámetros que relacionan a estas entre sí (el traslape) y con la escena registrada (la posición y orientación). Es decir, el bloque fotogramétrico relaciona el espacio imagen y el espacio terreno. A continuación se presentan las estrategias empleadas para determinar la información que define un bloque fotogramétrico:
Extracción y correlación de características (feature extraction and matching)
Lingua, Marenchino y Nex (2009a, p. 3746) definen este proceso como "la extracción de características de interés en dos o más imágenes del mismo objeto y de la correlación (matching) de estas características en imágenes adyacentes". Es decir, consiste en identificar y relacionar características similares (homólogas) entre imágenes en áreas comunes o de traslape. La relevancia del proceso de extracción y correlación se debe a que a partir de estas características extraídas es posible establecer la orientación relativa entre imágenes, la geometría interna de la cámara y la estructura tridimensional de la escena registrada.
Para la extracción de características se puede identificar dos tipos de algoritmos, los llamados operadores de puntos de interés o detectores de puntos/bordes, empleados principalmente en fotogrametría, y los detectores de región, usados en visión por computador (Lingua, Marenchino y Nex, 2009b).
Los operadores de puntos de interés están asociados a la identificación de elementos que sobresalen en la imagen por sus características radiométricas, es decir, elementos con un alto gradiente en su alrededor, como puntos, bordes, esquinas, etc. Estas características pueden ser fácilmente identificables en imágenes adyacentes cuando las condiciones de captura son normales y no se presentan mayores cambios en las condiciones estereoscópicas (inclinación, rotación, escala o cambios en la iluminación entre dos imágenes adyacentes). Por esto, en fotogrametría tradicional se presenta un mayor uso de estos operadores, siendo el operador de Forstner (Forstner y Gulch, 1987) y el operador de Harris (Harris y Stephens, 1988) los de mayor uso en software comercial.
Por otra parte, los detectores de región son un conjunto de pixeles asociados con la identificación de elementos que no presentan variación frente a los movimientos de la cámara que generan rotación, cambios de puntos de vista, de escala, la presencia de ruido en la imagen o cambios de iluminación en la escena (Lingua et al., 2009b). Estos efectos son muy comunes en fotogrametría de rango cercano y en visión por computador, por lo que estos algoritmos son desarrollados y empleados mayormente en estas áreas.
Para el caso de la fotogrametría UAV, en la que en la captura de imágenes no se presentan condiciones consideradas estándar como las requeridas en fotogrametría tradicional, los detectores de región han sido la alternativa para la extracción de características. Uno de los algoritmos de mayor implementación es el algoritmo SIFT (scale invariant feature transform) (Lowe, 1999; 2004). Según Lowe, el algoritmo se puede dividir en cuatro etapas principales: (i) detectar máximos y mínimos en el espacio-escala, (ii) identificar puntos de interés (iii) asignar orientación y (iv) generar el descriptor, el cual lleva asociado las propiedades del punto de interés (posición, escala, orientación) en un vector descriptivo de 128 dimensiones.
Otros algoritmos basados en el SIFT han sido desarrollados con el objetivo de reducir la dimensión del vector descriptivo, y optimizar cada una de las etapas del algoritmo original. El algoritmo SURF (speeded up robust features) (Bay, Tuytelaars y Van Gool, 2006) se presenta como otra alternativa junto al SIFT, pero con un costo computacional menor (vector descriptivo de 64 dimensiones). Aunque el SURF es más rápido que el SIFT, este último extrae mayor número de puntos invariantes (Romero y Cazorla, 2009). Lingua et al. (2009c) presentan un análisis del rendimiento del operador SIFT, y desarrollan una versión autoadaptativa de este (A2SIFT) que permite a ciertos parámetros del algoritmo ser definidos en relación a la textura de la imagen, y así extraer un mayor número de puntos característicos. Juan y Gwun (2009) presentan una comparación del algoritmo SIFT, el SURF y una versión modificada llamada PCA-SIFT donde se concluyen las ventajas y desventajas de cada uno. Chen y Zhao (2011) proponen un enfoque para la reducción de la dimensión del descriptor SIFT para disminuir el tiempo de cómputo y mantener la robustez del algoritmo. Por último, Mikolajczyk y Schmid (2005) presentan una completa evaluación del rendimiento de varios detectores de región.
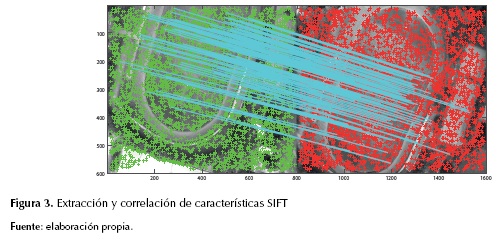
Una vez han sido extraídas las características de interés, el siguiente paso consiste en la correlación de características o correspondencia de puntos característicos (figura 3), que compara los vectores descriptores extraídos. Para ello se presentan dos métodos ampliamente utilizados: la búsqueda cuadrática (más lento pero riguroso, ya que realiza todas las combinaciones posibles en la comparación de los puntos) y la estructura de datos kd-tree (más rápido pero aproximado, debido a que la descomposición del espacio de datos disminuye la cardinalidad de los puntos a medida que se avanza en el árbol) (Arya et al., 1998; Barazzetti, Remondino y Scaioni, 2010b).
Por último, las correspondencias erróneas (outliers) que se presentan en la correlación son eliminadas a partir de la estimación de la orientación relativa de las imágenes a través del cálculo de la matriz fundamental o a través de la matriz esencial si los parámetros internos de la cámara son conocidos (Barazzetti et al., 2010b). Para la eliminación de correspondencias erróneas una de las estrategias más comunes es el algoritmo RANSAC (random sample consensus) (Fischler y Bolles, 1981; Li, Liu, Wang y Yan, 2005; Zuliani, 2012). Este algoritmo a través de un método iterativo determina la matriz de transformación (matriz fundamental) que mejor ajusta las correspondencias, y elimina las características que no cumplen un valor de referencia. Otras estrategias como LMS (least-median-square) y MAPSAC (Barazzetti et al., 2010b) son también encontradas en la bibliografía.
Calibración de cámaras y orientación de imágenes
La calibración de la cámara y la orientación de imágenes son dos requisitos fundamentales para la reconstrucción métrica desde imágenes en las áreas de fotogrametría y visión por computador (Nex y Remondino, 2013). En la calibración geométrica de una cámara el objetivo es determinar los parámetros intrínsecos de esta, como la longitud focal, el punto principal de la imagen y las distorsiones de las lentes de la cámara. Mientras que en la orientación de imágenes el propósito es determinar los parámetros extrínsecos, que son la posición (coordenadas en un sistema de referencia) y la orientación (ángulos de inclinación) de la cámara en el momento de la captura de cada imagen.
Calibración de la cámara
En la calibración de cámaras se pueden identificar dos métodos para determinar los parámetros intrínsecos de la cámara: la calibración en campo de prueba y la autocalibración.
- Calibración en campo de prueba (test-field calibration): Este método consiste en emplear un objeto 3D, 2D o 1D (Zhang, 2004) para determinar los parámetros intrínsecos de la cámara. En esta estrategia el objeto es ubicado en un sistema local de referencia del que se determinan las coordenadas de los elementos característicos del objeto (vértices o patrones dibujados en él). Luego, con la cámara, cuya posición también es conocida, se registra el objeto desde diferentes puntos de vista. A partir de las coordenadas conocidas y de la correlación de las imágenes capturadas se estima la matriz de proyección de la cámara de la cual son recuperados los parámetros intrínsecos. Una amplia variedad de estrategias para realizar este tipo de calibración puede ser encontrada en la bibliografía (Douterloigne, Gautama y Philips, 2009; Heikkila y Silvén, 1997; Wiggenhagen, 2002; Zhang, 2000).
- Autocalibración (self-calibration): En este método no se requiere de ningún objeto físico para determinar los parámetros intrínsecos de la cámara. Es decir, la geometría interna de esta se puede determinar a partir de la relación de dos o más imágenes traslapadas sin requerimientos de control adicional (El-Habrouk, Li y Faig, 1996). El método se basa en la correlación de elementos comunes entre las imágenes de una escena y empleando un procesos de optimización global que generalmente es un ajuste fotogramétrico en bloque o bundle block adjustment (Triggs, McLauchlan, Hartley y Fitzgibbon, 1999). En este ajuste en bloque, a las ecuaciones de colinealidad se agregan parámetros adicionales que modelan los errores sistemáticos del sistema de captura, esto con el fin de obtener mayor exactitud.
Nex y Remondino (2013) establecen que mediante la autocalibración con ajuste en bloque la calibración de la cámara y la orientación de las imágenes, realizadas en etapas diferentes, pueden llevarse a cabo al mismo tiempo en aplicaciones donde no se requiere gran exactitud. Hemayed (2003) presenta una revisión de los estrategias en el uso del método de autocalibración, mientras que Udin y Ahmad (2011) presentan una estrategia de autocalibración de cámaras digitales de alta resolución. Finalmente, Remondino y Fraser (2006) diferencian las características entre los enfoques de calibración de cámaras en las áreas de fotogrametría y de visión por computador.
En el caso de la fotogrametría UAV, por lo general se emplea el método de autocalibración con ajuste por haces, debido al uso de cámaras no métricas y a las condiciones variables de la plataforma en el aire, que dificulta que los datos de calibración obtenidos en un campo de prueba se mantengan en el momento de procesar las imágenes. No obstante, el uso de calibración basada en objetos, antes o después de la captura de datos, también es una alternativa ya que permite obtener datos que servirán como entradas iniciales en los diferentes modelos de calibración presentados en la bibliografía.
Eisenbeiss y Zhang (2006), a través de un software propio llamado BUN, que emplea la autocalibración con el modelo de Brown sin parámetros de distorsión, compararon la exactitud de los puntos de amarre o tie points extraídos con el software comercial LPS. En la investigación se obtuvo menor exactitud con el software comercial, lo que fue atribuido al hecho de que este está diseñado para levantamientos aéreos estándar, algo que no se presenta con plataformas UAV. No obstante, Bendea et al. (2008) también emplearon el software LPS en las operaciones de aerotriangulación, a través de una autocalibración, y consideraron que para actividades de mapeo rápido la exactitud obtenida con esta estrategia es adecuada. Junqing, Zongjian, Xiaojing y Yongrong (2012) desarrollaron una herramienta de calibración llamada MCC (multi cameras calibration), en la que se incluye la eliminación de las distorsiones ópticas de las imágenes.
Por su parte, Berni et al. (2009) realizaron la calibración geométrica de cámaras hiperespectral y térmica empleadas en plataformas UAV para la estimación de índices de vegetación. Esto se hizo a través de herramientas de calibración desarrolladas por J. Bouguet (citado por Berni et al., 2009) en el softwareMatlab, y se apoya en el uso de un objeto 2D (una tabla de ajedrez). En la investigación de Berni et al. (2009), los parámetros calculados en la calibración fueron empleados como aproximaciones iniciales en la etapa de aerotriangulación, junto con datos del sistema GPS/INS.
Orientación de imágenes
Consiste en determinar los parámetros de orientación exterior (coordenadas de posición y ángulos de inclinación) de cada imagen durante el tiempo de captura de esta. Para obtener estos parámetros se pueden identificar dos procedimientos: (i) la georreferenciación indirecta (obtenida de la aerotriangulación en fotogrametría tradicional) y (ii) la georreferenciación directa:
- Georreferenciación indirecta: Para determinar los parámetros de orientación en fotogrametría tradicional se emplea el ajuste en bloque en el que son requeridos los puntos de amarre (puntos homólogos) entre imágenes, los parámetros de la cámara y los puntos de control tomados en el terreno (GCP, por sus siglas en inglés). Tang, Braun y Debitsch (1997) definen los pasos básicos de este proceso: (i) la preparación del bloque, en la que se ordenan las imágenes de acuerdo con el vuelo, junto con los datos de la cámara y los puntos de control en el terreno; (ii) la determinación de tie points, que consiste en la selección de características homologas entre imágenes y su correlación correspondiente; (iii) la identificación de los GCP en las imágenes, y (iv) el ajuste en bloque, en el que a partir de la información anterior se realiza un proceso de optimización por ajuste de mínimos cuadrados en el que son calculados finalmente los parámetros de orientación exterior. Se suele definir como aerotriangulación automática al proceso en el que los tie points y los GCP en las imágenes son identificados automáticamente. Algunos software comerciales como LPS (Leica Photogrammetry Suite) y su módulo ORIMA (Orientation Management Software), ISDM (Z/I Imaging, Image Station Digital Mensuration), ATiPE (Automatic Tie Points Extraction) (Barazzetti, Remondino y Scaioni, 2010a) y Photomodeler, este último empleado en fotogrametría terrestre para realizar la etapa de orientación (Eisenbeiss, 2009).
- Georreferenciación directa: La georreferenciación directa es entendida como la implementación de sistemas GPS/INS a bordo de las plataformas aéreas, para la medición directa de los parámetros de orientación exterior (coordenadas con el GPS y los ángulos de inclinación con el sistema inercial).
Desde el punto de vista de la fotogrametría tradicional este método reduce la cantidad de trabajo en campo al requerir menos puntos de control para determinar la orientación. Cramer (1999) define tres ventajas principales en el uso de la georreferenciación directa: (i) permite una adquisición más rápida de los parámetros de orientación interior, (ii) podría en principio permitir la etapa de orientación sin puntos de control, con una buena configuración del bloque fotogramétrico, y (iii) son evitados los problemas adicionales en la correlación de imágenes realizada en la aerotriangulación, debidos a escenas capturadas consideradas problema (relieves difíciles, imágenes con baja textura, vegetación densa, cuerpos de agua extensos, etc.). Por otra parte, como consecuencias de este método se hace referencia a la dependencia de los datos con estos sistemas, siendo la exactitud de los dispositivos el aspecto más crítico.
Actualmente la mayoría de los sistemas UAV empleados para fotogrametría aérea cuentan con sistemas GPS/INS que son integrados en principio para propósitos de navegación pero que igualmente pueden ser aprovechados para la georreferenciación directa, por lo que este tipo de orientación de imágenes es la más implementada en sistemas UAV. Sin embargo, por cuestiones de capacidad de carga de las plataformas UAV pequeñas, la mayoría de veces estos GPS/INS corresponden a sistemas simplificados o de bajo costo que conllevan a una menor exactitud en la medición de los datos de posición y de orientación, pero que a través de estrategias de ajuste en las etapas de procesamiento pueden ser mejorados. En varias investigaciones esta integración de sistemas UAV con sistemas GPS/INS ha sido tratada, teniéndose como referencia inicial la investigación de Eisenbeiss (2009).
En investigaciones posteriores de Haala, Cramer, Weimer y Trittler (2012), se compararon los resultados de los dos métodos de orientación (directa y aerotriangulación) en la generación de DSM y ortomosaicos, obteniendo diferencias de hasta 3 m en la horizontal. Por su parte Bláha, Eisenbeiss, Grimm y Limpach (2011) evaluaron la exactitud de los datos de un sistema GPS a través del procesamiento diferencial de los datos, y determinaron que si la exactitud con sistemas GPS/INS logra el nivel de centímetros, la georreferenciación directa puede ser realizada.
Otras investigaciones de georreferenciación directa en sistemas UAV pueden ser consultadas en la bibliografía (Anai et al., 2012; Pfeifer, Glira y Briese, 2012; Turner, Lucieer y Wallace, 2014).
Reconstrucción de escenas 3D
Luego de la etapa de orientación de las imágenes el siguiente paso corresponde a la reconstrucción 3D de la escena registrada. Esta reconstrucción se hace a partir de la relación geométrica y radiométrica de las imágenes y tiene como producto final un modelo de nube de puntos del cual se genera un modelo digital de elevaciones (DSM). En fotogrametría tradicional la reconstrucción se da apoyada en las imágenes, en los datos de orientación y de calibración de la cámara, y en los puntos de control en el terreno. Como escenario opuesto, en el área de visión por computador se han desarrollado estrategias que permiten la reconstrucción 3D a partir de conjuntos de imágenes que no cuentan con ningún dato adicional asociado (Snavely, Seitz y Szeliski, 2007; Arévalo, Bayona y Rincón, 2015).
Considerando que la fotogrametría UAV presenta características asociadas a estas dos áreas, se pretende hacer una revisión de las estrategias empleadas para la reconstrucción de escenas 3D a partir de imágenes UAV. El flujo de trabajo consiste de tres etapas claramente identificadas en la bibliografía y que corresponden a: i) la generación de puntos 3D o nube de puntos dispersa, ii) la densificación de la nube de puntos y iii) DSM y ortorrectificación.
Generación de puntos 3D
La estrategia para la generación de puntos 3D consiste en determinar las coordenadas 3D de los puntos característicos extraídos en la primera etapa de procesamiento. En el área de visión por computador se presenta una estrategia llamada structure from motion (SfM). Esta se basa en el ajuste en bloque y se diferencia de la fotogrametría estereoscópica en que la geometría de la escena y los parámetros de la cámara son calculados sin necesidad de tener datos iniciales, es decir, no requiere de una calibración previa de la cámara ni de GCP. En lugar de ello, la estrategia se basa en la redundancia obtenida de múltiples imágenes con altos porcentajes de traslape (Westoby et al., 2012).
La estrategia de SfM, apoyada en las características extraídas y correlacionadas, y en las restricciones asociadas a la geometría epipolar, permite extraer la geometría de la cámara (posición y orientación) junto con la geometría 3D de las características, a través del refinamiento de los datos en el ajuste en bloque. Los datos resultantes son una nube de puntos dispersos en un sistema de coordenadas arbitrario, que luego son asociados a un sistema global a través de los parámetros de transformación de Helmert (Turner, Lucieer y Wallace, 2012; Nex y Remondino, 2013). La nube de puntos dispersa generada en esta estrategia es empleada como una aproximación inicial del modelo digital de superficie (DSM).
Dadas las características de la fotogrametría UAV (redundancia de imágenes y altos porcentajes de traslape) junto con la falta, en algunos casos, de datos de la geometría de la cámara, de sistemas GPS/INS en la plataforma y de la dificultad de obtener puntos de control en el terreno, se ha vinculado esta estrategia con el procesamiento de imágenes UAV.
Roncella, Re y Forlani (2011) presentan una comparación de dos estrategias de SfM empleadas en cinco casos de estudio con fotogrametría de rango cercano. Por su parte, Remondino, Del Pizzo, Kersten y Troisi (2012) presentan algunos software de libre acceso (VisualSfM, Blunder, Apero, Insight3D), servicios web libres (Microsoft´s Photosynth) y software comercial (Agisoft Photoscan) para la generación de nubes de puntos dispersos a partir de la estrategia de SfM.
Densificación de nube de puntos
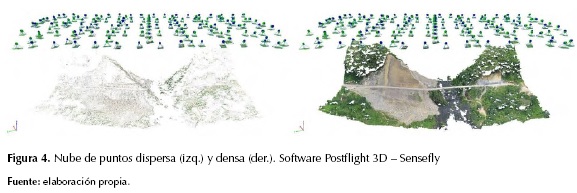
Esta etapa consiste en extraer una mayor cantidad de puntos 3D de la escena que complemente la nube de puntos dispersa generada en la etapa anterior (figura 4). Las estrategias empleadas en esta etapa forman parte de lo que se considera como técnicas de correlación de múltiples imágenes o multi-image matching.
Algunas estrategias como la de Barazzetti, Scaioni y Remondino (2010), basadas en la técnica llamada GC3 (geometrically constrained cross-correlation) o MIGC3 (multi-image geometrically constraint cross-correlation) (Lingua, Marenchino y Nex, 2009c) emplean la nube de puntos dispersa para generar un modelo digital del terreno aproximado. La estrategia consiste en seleccionar una imagen base central y dos de búsqueda adyacentes. De la imagen base se identifica un punto característico que se proyecta sobre el modelo del terreno aproximado y se establece una altura máxima y una mínima. Estos tres puntos (punto máximo, mínimo y del terreno) son reproyectadas a las imágenes de búsqueda, definiendo la geometría epipolar aproximada en estas imágenes. Por último, sobre esta geometría epipolar, se identifican los puntos homólogos, y a su vez se determina el valor de la nueva altura en el terreno. Marenchino (2009) presenta un algoritmo de filtrado llamado self-tuning standard deviation median filter (S2MF) para la edición de la nube de puntos. Esta estrategia es generalmente empleada para filtrar DSM generados con técnicas LiDAR.
Otra estrategia corresponde a una técnica llamada estereopsis de múltiples vistas (multi-view stereopsis), presentada por Furukawa y Ponce (2007). La técnica emplea las correspondencias extraídas y expande estos puntos a manera de regiones dentro de las que determina las correspondencias de pixeles vecinos (Lucieer, Robinson y Turner, 2011). Esta técnica ha sido implementada en el software PMVS2 (Patch-based Multiview Stereo) el cual toma un conjunto de imágenes y los parámetros de la cámara para reconstruir la estructura 3D de la escena registrada, descartando estructuras no rígidas o en movimiento (Furukawa y Ponce, 2007).
Hirschmuller (2005, 2008, 2011) presenta un método llamado Semi-Global Matching (SGM) para la generación de nubes de puntos densas. La estrategia se basa en la comparación de pixeles a través de un concepto denominado mutual information, que depende de las diferencias de entropía entre imágenes. La entropía, que es una medida de la cantidad de información requerida para describir una señal en imágenes, está asociada proporcionalmente al contraste presente radiométricamente (Gehrke, Morin y Downey, 2010), por tanto en pixeles homólogos las diferencias de entropía serán mínimas. En ese sentido la estrategia se encarga de establecer la correspondencia de cada uno de los pixeles de las imágenes, para la generación de una nube de puntos densa. Haala (2011) presenta un algoritmo basado en el semi-global matching de Hirschmuller con algunas consideraciones adicionales.
Hirschmüller y Bucher (2010) presentan una evaluación de los modelos digitales de elevación de zonas urbanas generados a partir de la nube de puntos del semi-global matching. En esta investigación se concluye que la calidad de los modelos digitales generados a partir de imágenes aéreas, son comparables a los generados por un escáner laser aéreo. Por otra parte, Gehrke et al. (2010) establece que la estrategia de semi-global matching es comparable con la tecnología LiDAR, en la medida en que se pueden obtener modelos digitales de elevación de alta precisión generados a partir de nubes de puntos de alta densidad.
Modelo digital de elevaciones y ortorrectificación
La etapa final en el procesamiento de imágenes tomadas con sistemas UAV o fotogrametría UAV consiste en generar un modelo digital de elevaciones o de superficie (DSM) y un ortomosaico de la escena registrada. Para la generación de estos modelos la nube de puntos debe pasar por una triangulación y rasterización. Una estrategia muy comúnmente empleada es la triangulación de Delaunay, en la que se genera una red irregular de triángulos (TIN) de la que son interpoladas los valores de altura para la generación de un archivo raster. Esta estrategia es igualmente empleada en la reconstrucción de superficies a partir de nubes de puntos obtenidas con escáner laser terrestre (Gallo, Cáceres y Porras, 2014). Por su parte, en la generación del ortomosaico, las imágenes individuales son rectificadas a partir del modelo de elevaciones, eliminando la distorsión asociada al relieve. Este proceso consiste en proyectar cada pixel de la imagen sobre el modelo de elevación para determinar el valor de altura, este valor es empleado para reproyectar sobre la imagen la nueva posición del pixel. La proyección y reproyección de los pixeles de la imagen se realiza con las ecuaciones de colinealidad. Por último, todas las imágenes rectificadas son unidas formando un mosaico.
Una de las investigaciones más detalladas en la generación de estos productos a partir de imágenes UAV y combinando estrategias de procesamiento en áreas como la fotogrametría y visión por computador es presentada por Barazzetti et al. (2014). La investigación se basa en la implementación de un algoritmo llamado MGCM (multi-image least squares marching) que apoyado en una nube de puntos dispersa genera un modelo más denso de puntos a través de triangulación. Finalmente, a partir de este modelo denso (mesh) se realiza la ortorrectificación considerando los objetos tridimensionales y las áreas de oclusión en la escena.
Algunos software de acceso libre como VMS (vision measurement system) empleados en fotogrametría de corto alcance, permiten generar modelos digitales de superficie como en la investigación de Niethammer et al. (2011), en donde el objetivo era evaluar los deslizamientos de tierra en una zona, comparando modelos del terreno a partir de imágenes y con tecnología LiDAR. Igualmente, para la generación de modelos digitales y ortomosaicos, algunas investigaciones han empleado software comercial como ERDAS (Udin, Hassan, Ahmad y Tahar, 2012), SOCET SET (Rosnell y Honkavaara, 2012), PHOTOMOD (Samad et al., 2013) o a través de procesamiento de datos online (Vallet et al., 2012). Finalmente, Höhle (2011) presenta una revisión de los aspectos que influyen en la generación de los modelos de elevación desde el punto de vista de las cámaras.
CONCLUSIONES
Los sistemas UAV actualmente desempeñan un papel principal en investigación y aplicación en las áreas de fotogrametría aérea y de percepción remota. Son considerados una gran alternativa para la adquisición de imágenes de alta resolución espacial y temporal, y han mostrado un gran potencial para la respuesta rápida en diferentes escenarios.
Las grandes ventajas que ofrecen estos sistemas han sido impulsadas por los adelantos tecnológicos en sistemas de sensores de captura, de navegación y de posicionamiento. Esto ha facilitado la simplificación e integración de estos sistemas en plataformas aéreas pequeñas, confiables y de relativa fácil adquisición. Paralelamente, los avances en las estrategias de procesamiento de imágenes en el área de visión por computador, y la integración con los conocimientos de la fotogrametría han permitido que el procesamiento de los grandes volúmenes de información obtenidos con los sistemas UAV y los altos niveles de automatización de las etapas de procesamiento sean posibles.
Estos adelantos tecnológicos y de procesamiento han impulsado investigaciones orientadas principalmente al desarrollo de algoritmos robustos en las etapas de extracción y correlación de características y a la generación de nubes de puntos de alta densidad, así como en mejorar la precisión de los productos cartográficos generados, mientras que otras investigaciones en el área de visión por computador se han enfocado en optimizar el procesamiento para aplicaciones en tiempo real.
REFERENCIA BIBLIOGRÁFICAS
Adams, S.M. y Friedland, C.J. (2011). A survey of unmanned aerial vehicle (UAV) usage for imagery collection in disaster research and management. En: 9th International Workshop on Remote Sensing for Disaster Response (p. 8). Stanford, CA, USA. Recuperado de: http://blume.stanford.edu/sites/default/files/RS_Adams_Survey_paper_0.pdf.
Aerocivil (2009). Normas de aeronavegabilidad y operación de aeronaves. En: Reglamentos Aeronáuticos de Colombia (p. 660).
Aerocivil. (2015). Requisitos Generales de Aeronavegabilidad y Operaciones para RPAS. Recuperado de: https://www.aerocivil.gov.co/AAeronautica/Rrglamentacion/Cirdulares/CircularesReglamentarias/CR-5100-082-002.pdf.
Aibotix (2014). Aibot X6 Multicopter for Mapping and Industry. Recuperado el 5 de septiembre de 2014, de: http://www.aibotix.com/.
Anai, T.; Sasaki, T.; Osaragi, K.; Yamada, M.; Otomo, F. y Otani, H. (2012). Automatic Exterior Orientation Procedure for Low-Cost Uav Photogrammetry Using Video Image Tracking Technique and Gps Information. ISPRS-International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, XXXIX-B7(September), 469-474. http://doi.org/10.5194/isprsarchives-XXXIX-B7-469-2012
Arévalo V., B.; Bayona I., E. y Rincón P., I.K. (2015). Metodología para documentación 3D utilizando fotogrametría digital. Revista Tecnura, 19, 113-120. http://doi.org/10.14483/udistrital.jour.tecnu-ra.2015.SE1.a09.
Arthur, M.; Al-Tahir, R. y Davis, D. (2012). Rapid Processing of Unmanned Aerial Vehicles Imagery for Disaster Management. FIG Working Week 2012 TS04H-Measurement Applications of Unmanned Vehicles, 1-10. Recuperado de: http://www.fig.net/resources/proceedings/fig_proceedings/fig2012/papers/ts04h/TS04H_arthur_altahir_et_al_6033.pdf.
Arya, S.; Mount, D.M.; Netanyahu, N.S.; Silverman, R. y Wu, A.Y. (1998). An Optimal Algorithm for Approximate Nearest Neighbor Searching in Fixed Dimensions. Journal of the ACM, 45(6), 1-31.
Barazzetti, L.; Brumana, R.; Oreni, D.; Previtali, M. y Roncoroni, F. (2014). True-orthophoto generation from UAV images: Implementation of a combined photogrammetric and computer vision approach. ISPRS Annals of Photogrammetry, Remote Sensing and Spatial Information Sciences, II-5(June), 57-63. http://doi.org/10.5194/isprsannals-II-5-57-2014.
Barazzetti, L.; Remondino, F. y Scaioni, M. (2010a). Automation in 3D reconstruction: results on different kinds of close-range blocks. International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, XXXVIII(5), 55-61. Recuperado de: http://isprsserv.ifp.uni-stuttgart.de/proceedings/XXXVIII/part5/papers/106.pdf.
Barazzetti, L.; Remondino, F. y Scaioni, M. (2010b). Extraction of accurate tie points for automated pose estimation of close-range blocks. ISPRS Technical Commission III ..., XXXVIII(3A), 151-156. Recuperado de: http://www.isprs.org/proceedings/xxxviii/part3/a/pdf/151_XXXVIII-part3A.pdf.
Barazzetti, L.; Scaioni, M. y Remondino, F. (2010). Orientation and 3D modelling from markerless terrestrial images: combining accuracy with automation. The Photogrammetric Record, 25(132), 356-381. Recuperado de: http://onlinelibrary.wiley.com/doi/10.1111/j.1477-9730.2010.00599.x/full.
Bay, H.; Tuytelaars, T. y Van Gool, L. (2006). SURF : Speeded Up Robust Features. En: A. Leonardis, H. Bischof y A. Pinz (eds.). Computer Vision - ECCV 2006 (pp. 404-417). Berlín: Springer Verlag. http://doi.org/10.1007/11744023_32.
Bendea, H.; Boccardo, P.; Tonolo, F.G.; Marenchino, D. y Piras, M. (2008). Low cost UAV for post-disaster assessment. International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, XXXVII(B8), 1373-1380. Recuperado de: http://www.isprs.org/proceedings/XXXVII/congress/8_pdf/14_ThS-20/37.pdf.
Berni, J.A.J.; Zarco-Tejada, P.J.; Suárez, L.; González-Dugo, V. y Fereres, E. (2009). Remote sensing of vegetation from UAV platforms using lightweight multispectral and thermal imaging sensors. En: C. Heipke, K. Jacobsen, S. Müller y U. Sörgel (eds.). ISPRS Hannover Workshop 2009 (p. 6). Hannover, Alemania. Recuperado de: http://isprsserv.ifp.uni-stuttgart.de/proceedings/XXXVIII/1_4_7-W5/paper/Jimenez_Berni-155.pdf.
Bláha, M.; Eisenbeiss, H.; Grimm, D. y Limpach, P. (2011). Direct georeferencing of UAVs. International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, XXXVIII(1/C22), 131-136. Recuperado de: http://www.igp.ethz.ch/photogrammetry/publications/pdf_folder/2011_Direct_Georeferencing_of_UAVS.pdf.
Chen, W. y Zhao, Y. (2011). An improved SIFT algorithm for image feature-matching. 2011 International Conference on Multimedia Technology, 197-200. http://doi.org/10.1109/ICMT.2011.6003022.
Cheng, Y., Xue, D., & Li, Y. (2007). A Fast Mosaic Approach for Remote Sensing Images. 2007 International Conference on Mechatronics and Automation, 2009-2013. http://doi.org/10.1109/ICMA.2007.4303859.
Chiabrando, F.; Nex, F.; Piatti, D. y Rinaudo, F. (2011). UAV and RPV systems for photogrammetric surveys in archaelogical areas: two tests in the Piedmont region (Italy). Journal of Archaeological Science, 38(3), 697-710. http://doi.org/10.1016/j.jas.2010.10.022.
Colomina, I. y Molina, P. (2014). Unmanned aerial systems for photogrammetry and remote sensing: A review. ISPRS Journal of Photogrammetry and Remote Sensing, 92, 79-97. http://doi.org/10.1016/j.isprsjprs.2014.02.013.
Cramer, M. (1999). Direct Geocoding-is Aerial Triangulation Obsolete? In Photogrammetric Week "99" (pp. 59-70). Retrieved from http://citeseerx.ist.psu.edu/viewdoc/summary?doi=10.1.1.17.3058.
Douterloigne, K.; Gautama, S. y Philips, W. (2009). Fully automatic and robust UAV camera calibration using chessboard patterns. International Geoscience and Remote Sensing Symposium (IGARSS), 2, 551-554. http://doi.org/10.1109/IGARSS.2009.5418141.
Eisenbeiss, H. (2009). UAV Photogrammetry. Zúrich: ETH and Institute of Geodesy and Photogrammetry.
Eisenbeiss, H. y Zhang, L. (2006). Comparison of DSMs generated from mini UAV imagery and terrestrial laser scanner in a cultural heritage application. International Archives of Photogrammetry, Remote Sensing and Spatial Information Sciences XXXVI-5, 90-96. http://doi.org/10.1.1.221.8350.
El-Habrouk, H.; Li, X.P. y Faig, W. (1996). Determination of geometric characteristics of a Digital Camera by Self-Calibration. International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, XXXI(B1), 60-64.
Elaksher, A. (2008). A multi-photo least squares matching algorithm for urban area DEM refinement using breaklines. International Archives of Photogrammetry, Remote Sensing, and Spatial Information Sciences 37, Part B3A, XXXVII(B3a), 33-38. Recuperado de: http://www.isprs.org/proceedings/XXXVII/congress/3_pdf/05a.pdf
Everaerts, J. (2008). The use of unmanned aerial vehicles (UAVs) for remote sensing and mapping. International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, XXXVII(B1), 1187-1192. Recuperado de: http://www.isprs.org/proceedings/XXXVII/congress/1_pdf/203.pdf.
Fischler, M.A. y Bolles, R.C. (1981). Random Sample Consensus: A Paradigm for Model Fitting with Applications to Image Analysis and Automated Cartography. CACM, 24(6), 381-395.
Forstner, W. y Gulch, E. (1987). A Fast Operator for Detection and Precise Location of Distinct Points, Corners and Centres of Circular Features.pdf. En: Proceedings of the ISPRS Intercommission Workshop on Fast Processing of Photogrammetric Data (pp. 281-305). Interlaken, Suiza.
Furukawa, Y. y Ponce, J. (2007). Accurate, dense, and robust multiview stereopsis. In IEEE Conference on Computer Vision and Pattern Recognition (CVPR) (Vol. 32, pp. 1-8). Minneapolis, USA. http://doi.org/10.1109/TPAMI.2009.161.
Gallo L., E.O.; Cáceres J., J.J. y Porras D., H. (2014). Modelos urbanos tridimensionales generados a partir de nubes de puntos de un escáner láser terrestre Three-dimensional urban models generated from point clouds. Revista Tecnura, 18(41), 134-153. http://doi.org/http://dx.doi.org/10.14483/udistrital.jour.tecnura.2014.3.a10
Gehrke, S.; Morin, K. y Downey, M. (2010). Semi-global matching: An alternative to LIDAR for DSM generation. International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences. Recuperado de: http://www.isprs.org/proceedings/xxxviii/part1/11/11_01_Paper_121.pdf.
Gini, R.; Pagliari, D.; Passoni, D.; Pinto, L.; Sona, G. y Dosso, P. (2013). UAV Photogrammetry : Block Triangulation Comparisons. International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, XL(1/W2), 157-162.
Haala, N. (2011). Multiray Photogrammetry and Dense Image Matching. En: D. Fritsch (ed.). Photogrammetric Week '11 (pp. 185-195). Stuttgart: Wichmann.
Haala, N.; Cramer, M.; Weimer, F. y Trittler, M. (2012). Performance Test on Uav-Based Photogrammetric Data Collection. ISPRS-International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, XXXVIII-1/, 7-12. http://doi.org/10.5194/isprsarchives-XXXVIII-1-C22-7-2011.
Harris, C. y Stephens, M. (1988). A Combined Corner and Edge Detector. Procedings of the Alvey Vision Conference 1988, 147-151. http://doi.org/10.5244/C.2.23.
Hartley, R.I. y Mundy, J.L. (1993). The relationship between photogrammetry and computer vision. En: Integrating Photogrammetric Techniques With Scene Analysis and Machine Vision. SPIE Digital Library (Vol. 1944, p. 14).
Heikkila, J. y Silvén, O. (1997). A four-step camera calibration procedure with implicit image correction. En: Conference on Computer Vision and Pattern Recognition (pp. 1106-1112). Recuperado de: http://ieeexplore.ieee.org/xpls/abs_all.jsp?arnumber=609468.
Hemayed, E.E.E.E. (2003). A survey of camera self-calibration. Proceedings of the IEEE Conference on Advanced Video and Signal Based Surveillance, 2003, 351-357. http://doi.org/10.1109/AVSS.2003.1217942.
Hirschmuller, H. (2005). Accurate and efficient stereo processing by semi-global matching and mutual information. ... Vision and Pattern Recognition, 2005. CVPR .... Recuperado de: http://ieeexplore.ieee.org/xpls/abs_all.jsp?arnumber=1467526.
Hirschmüller, H. (2008). Stereo processing by semiglobal matching and mutual information. IEEE Transactions on Pattern Analysis and Machine Intelligence, 30(2), 328-41. http://doi.org/10.1109/TPAMI.2007.1166.
Hirschmüller, H. (2011). Semi-Global Matching Motivation, Developments and Applications. Photogrammetric Week, 173-184. Retrieved from http://www.robotic.dlr.de/fileadmin/robotic/hirschmu/pw2011hh.pdf.
Hirschmüller, H. y Bucher, T. (2010). Evaluation of digital surface models by semi-global matching. DGPF Tagungsband. Recuperado de: http://www.ifp.uni-stuttgart.de/dgpf/wien/5-HirschmuellerBucher-SemiGlobalMatching.pdf.
Höhle, J. (2011). On the potential of new digital aerial cameras for DEM generation. The Photogrammetric Journal of Finland, 22(2), 27-36. Recuperado de: http://foto.hut.fi/seura/julkaisut/pjf/pjf_e/2011/PJF2011_Hohle.pdf.
ISPRS. (2004). Approved resolutions of the XXth ISPRS Congress-Istanbul 2004. En: International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences (Vol. XXXV, p. 40). Estambul, Turquía.
Juan, L. y Gwun, O. (2009). A comparison of sift, pca-sift and surf. International Journal of Image Processing (IJIP), 3(4), 143-152. Recuperado de: http://www.cscjournals.org/csc/manuscript/Journals/IJIP/volume3/Issue4/IJIP-51.pdf.
Junqing, C.; Zongjian, L.; Xiaojing, W.; Yongrong, L. y Acquisition, A.I. (2012). Application of UAV system for low altitude photogrammetry in Shanxi. International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, XXXIX(1), 351-354.
Kohoutek, T. y Eisenbeiss, H. (2012). Processing of UAV based range imaging data to generate detailed elevation models of complex natural structures. International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, XXXIX, 405-410. Recuperado de: http://www.int-arch-photogramm-remote-sens-spatial-inf-sci.net/XXXIX-B1/405/2012/isprsarchives-XXXIX-B1-405-2012.pdf
Lei, R.; Fan, D.; Ji, S. y Zhai, H. (2008). Theory and Algorithms of DSM generation from multi-line-array images matching. International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, XXXVII(B4), 337-342. Recuperado de: http://www.isprs.org/proceedings/XXXVII/congress/4_pdf/59.pdf
Li, M.; Li, D. y Fan, D. (2012). A study on automatic UAV image mosaic method for paroxysmal disaster. International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, XXXIX(B6), 123-128.
Li, X.; Liu, Y.; Wang, Y. y Yan, D. (2005). Computing Homography with RANSAC Algorithm: A Novel Method of Registration. En: C.-S. Li y M.M. Yeung (eds.). SPIE 5637 (Vol. 5637, pp. 109-112). http://doi.org/10.1117/12.579121
Lingua, A.; Marenchino, D. y Nex, F. (2009a). Performance Analysis of the SIFT Operator for Automatic Feature Extraction and Matching in Photogrammetric Applications. Sensors (Basel, Switzerland), 9(5), 3745-66. http://doi.org/10.3390/s90503745.
Lingua, A.; Marenchino, D. y Nex, F. (2009b). A comparison between " old and new " feature extraction and matching techniques in Photogrammetry. RevCAD, Journal of Geodesy and Cadastre, 9, 43-52.
Lingua, A.; Marenchino, D. y Nex, F. (2009c). Automatic Digital Surface Model (DSM) generation procedure from images acquired by Unmanned Aerial Systems (UASs). RevCAD, Journal of Geodesy and Cadastre, (9), 53-64.
Lowe, D.G. (1999). Object recognition from local scale-invariant features. Proceedings of the Seventh IEEE International Conference on Computer Vision, 2, 1150-1157. http://doi.org/10.1109/ICCV.1999.790410.
Lowe, D.G. (2004). Distinctive Image Features from Scale-Invariant Keypoints. International Journal of Computer Vision, 60(2), 91-110. http://doi.org/10.1023/B:VISI.0000029664.99615.94.
Lucieer, A., Robinson, S. y Turner, D. (2011). Unmanned Aerial Vehicle (UAV) remote sensing for hyperspatial terrain mapping of Antarctic Moss beds based on Structure from Motion (SfM) point clouds. Proceeding of the 34th International Symposium on Remote Sensing of Environment, Sydney, Australia, (January 2008), 1-4. Recuperado de: http://www.isprs.org/proceedings/2011/ISRSE-34/211104015Final00641.pdf.
MarcusUAV (2014). Personal UAV Systems For Photography, Surveillance and More. Recuperado el 5 de septiembre de 2014 de: http://www.marcusuav.com/.
Marenchino, D. (2009). Low-cost UAV for the environmental emergency management. Photogrammetric procedures for rapid mapping activities. Ph.D Thesis Politecnico Di Torino. Recuperado de: http://citeseerx.ist.psu.edu/viewdoc/download?doi=10.1.1.329.9625&rep=rep1&type=pdf.
Microdrones (2014). UAV Solutions for Mapping, Unmanned Cargo and Inspection Tasks. Recuperado el 5 de septiembre de 2014 de: http://www.microdrones.com/en/home/.
Mikolajczyk, K. y Schmid, C. (2005). Performance evaluation of local descriptors. IEEE Transactions on Pattern Analysis and Machine Intelligence, 27(10), 1615-1630. http://doi.org/10.1109/TPAMI.2005.188.
Neitzel, F. y Klonowski, J. (2011). Mobile 3D mapping with a low-cost UAV system. International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, XXXVIII, 1-6. Recuperado de: http://143.93.114.105/sites/default/files/public/data/uav-g_neitzel_klonowski.pdf.
Nex, F. y Remondino, F. (2013). UAV for 3D mapping applications: a review. Applied Geomatics, 6(1), 1-15. http://doi.org/10.1007/s12518-013-0120-x.
Niethammer, U.; James, M.R.R.; Rothmund, S.; Travelletti, J. y Joswig, M. (2011). UAV-based remote sensing of the Super-Sauze landslide: Evaluation and results. Engineering Geology, 128, 2-11. http://doi.org/10.1016/j.enggeo.2011.03.012.
Niethammer, U.; Rothmund, S.; James, M.R.; Travelletti, J. y Joswig, M. (2010). UAV-Based Remote Sensing of Landslides. International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, XXXVIII(5), 496-501.
Nizam T., K. y Ahmad, A. (2013). An Evaluation of Fixed Wing and Multi-Rotor UAV Images using Photogrammetric Image Processing. World Academy of Science, Engineering and Technology, 7, 346-350. Recuperado de: http://waset.org/publications/11861/an-evaluation-on-fixed-wing-and-multi-rotor-uav-images-using-photogrammetric-image-processing.
Pfeifer, N.; Glira, P. y Briese, C. (2012). Direct Georeferencing With on Board Navigation Components of Light Weight Uav Platforms. ISPRS-International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, XXXIX-B7(September), 487-492. http://doi.org/10.5194/isprsarchives-XXXIX-B7-487-2012.
Remondino, F. y Fraser, C. (2006). Digital camera calibration methods: Considerations and comparisons. International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, 36(5), 266-272.
Remondino, F.; Del Pizzo, S.; Kersten, T.P. y Troisi, S. (2012). Low-Cost and Open-Source Solutions for Automated Image Orientation-A Critical Overview. En: Progress in Cultural Heritage Preservation (Vol. 2012, pp. 40-54). Springer Berlin Heidelberg. http://doi.org/10.1007/978-3-642-34234-9_5.
Romero, A.M. y Cazorla, M. (2009). Comparativa de detectores de características visuales y su aplicación al SLAM. X Workshop de Agentes Físicos, Septiembre 2009, 55-62. Recuperado de: http://scholar.google.com/scholar?hl=en&btnG=Search&q=intitle:Comparativa+de+detectores+de+caractersticas+visuales+y+su+aplicaci+´+on+al+SLAM#0.
Roncella, R.; Re, C. y Forlani, G. (2011). Comparison of two structure and motion strategies. International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, XXXVIII, 343-350.
Rosnell, T. y Honkavaara, E. (2012). Point cloud generation from aerial image data acquired by a quadrocopter type micro unmanned aerial vehicle and a digital still camera. Sensors (Basel, Switzerland), 12(1), 453-480. http://doi.org/10.3390/s120100453.
Rumpler, M.; Wendel, A. y Bischof, H. (2013). Probabilistic Range Image Integration for DSM and True-Orthophoto Generation. En: J.-K. Kämäräinen y M. Koskela (eds.). Image Analysis (pp. 533-544). Espoo, Finlandia: Springer Berlin Heidelberg. http://doi.org/10.1007/978-3-642-38886-6_50.
Salvo, G.; Caruso, L. y Scordo, A. (2014). Urban Traffic Analysis through an UAV. Procedia-Social and Behavioral Sciences, 111, 1083-1091. http://doi.org/10.1016/j.sbspro.2014.01.143.
Samad, A.M.; Kamarulzaman, N.; Hamdani, M.A.; Mastor, T.A. y Hashim, K.A. (2013). The potential of Unmanned Aerial Vehicle (UAV) for civilian and mapping application. En: 2013 IEEE 3rd International Conference on System Engineering and Technology (pp. 313-318). Shah Alam, Malaysia: IEEE. http://doi.org/10.1109/ICSEngT.2013.6650191.
Sensefly (2014). Professional Mapping Drones, Flight Planning & Control, Maps and 3D Models. Recuperado 5 de septiembre de: https://www.sensefly.com/home.html
Shi, J.; Wang, J. y Xu, Y. (2011). Object-Based Change Detection Using Georeferenced UAV Images. ISPRS-International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, XXXVIII-1/(1/C22), 177-182. http://doi.org/10.5194/isprsarchives-XXXVIII-1-C22-177-2011.
Snavely, N.; Seitz, S.M. y Szeliski, R. (2007). Modeling the World from Internet Photo Collections. International Journal of Computer Vision, 80(2), 189-210. http://doi.org/10.1007/s11263-007-0107-3.
Tang, L.; Braun, J. y Debitsch, R. (1997). Automatic aerotriangulation - concept, realization and results. ISPRS Journal of Photogrammetry and Remote Sensing, 52(3), 122-131. http://doi.org/10.1016/S0924-2716(97)00012-9.
Triggs, B.; McLauchlan, P.; Hartley, R. y Fitzgibbon, A. (1999). Bundle adjustment-a modern synthesis. Vision Algorithms, 99, 1-71. Recuperado de: http://link.springer.com/chapter/10.1007/3-540-44480-7_21.
Trimble. (2014). Trimble UX5 Aerial Imaging Rover. Recuperado el 5 de septiembre de 2014, de: http://www.trimble.com/Survey/ux5.aspx.
Turner, D.; Lucieer, A. y Wallace, L. (2014). Direct Georeferencing of Ultrahigh-Resolution UAV Imagery. IEEE Transactions on Geoscience and Remote Sensing, 52(5), 2738-2745. http://doi.org/10.1109/TGRS.2013.2265295.
Turner, D.; Lucieer, A. y Watson, C. (2012). An Automated Technique for Generating Georectified Mosaics from Ultra-High Resolution Unmanned Aerial Vehicle (UAV) Imagery, Based on Structure from Motion (SfM) Point Clouds. Remote Sensing, 4(12), 1392-1410. http://doi.org/10.3390/rs4051392.
Udin, W.S. y Ahmad, A. (2011). Calibration of high resolution digital camera using self-calibration bundle adjustment method. En: 2011 IEEE 7th International Colloquium on Signal Processing and its Applications (Vol. 1, pp. 137-141). Ieee. http://doi.org/10.1109/CSPA.2011.5759859.
Udin, W.S.; Hassan, A.F.; Ahmad, A. y Tahar, K. N. (2012). Digital Terrain Model extraction using digital aerial imagery of Unmanned Aerial Vehicle. 2012 IEEE 8th International Colloquium on Signal Processing and Its Applications, 272-275. http://doi.org/10.1109/CSPA.2012.6194732.
Vallet, J.; Panissod, F.; Strecha, C. y Tracol, M. (2012). Photogrammetric Performance of an Ultra Light Weight Swinglet "Uav." ISPRS-International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, XXXVIII-1/, 253-258. http://doi.org/10.5194/isprsarchives-XXXVIII-1-C22-253-2011.
Watts, A.C.; Ambrosia, V.G. y Hinkley, E.A. (2012). Unmanned Aircraft Systems in Remote Sensing and Scientific Research: Classification and Considerations of Use. Remote Sensing, 4(12), 1671-1692. http://doi.org/10.3390/rs4061671.
Westoby, M. J., Brasington, J., Glasser, N. F., Hambrey, M. J., & Reynolds, J. M. (2012). "Structure-from-Motion" photogrammetry: A low-cost, effective tool for geoscience applications. Geomorphology, 179, 300-314. http://doi.org/10.1016/j.geomorph.2012.08.021.
Wiggenhagen, M. (2002). Calibration of Digital Consumer Cameras for Photogrammetric Applications. En: ISPRS Commission III, Symposium 2002 (p. 6). Graz, Austria.
Xiang, H. y Tian, L. (2011). Development of a low-cost agricultural remote sensing system based on an autonomous unmanned aerial vehicle (UAV). Biosystems Engineering, 108(2), 174-190. http://doi.org/10.1016/j.biosystemseng.2010.11.010.
Xie, F.; Lin, Z.; Gui, D. y Lin, H. (2012). Study on Construction of 3D Building Based on Uav Images. ISPRS-International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, XXXIX-B1, 469-473. http://doi.org/10.5194/isprsarchives-XXXIX-B1-469-2012.
Yahyanejad, S.; Quaritsch, M. y Rinner, B. (2011). Incremental, orthorectified and loop-independent mosaicking of aerial images taken by micro UAVs. 2011 IEEE International Symposium on Robotic and Sensors Environments (ROSE), 137-142. http://doi.org/10.1109/ROSE.2011.6058531
Zhang, Z. (2000). A Flexible New Technique for Camera Calibration. IEEE Transactions on Pattern Analysis and Machine Intelligence, 22(11), 1330-1334.
Zhang, Z. (2004). Camera calibration. En: G. Medioni y S.B. Kang (eds.). Emerging Topics in Computer Vision (pp. 4-43). Recuperado de: http://www.inf.ethz.ch/personal/pomarc/pubs/KangMedioniBook.pdf
Zuliani, M. (2012). RANSAC for Dummies. Recuperado de: http://vision.ece.ucsb.edu/~zuliani/Research/RANSAC/RANSAC.shtml.
Licencia
Esta licencia permite a otros remezclar, adaptar y desarrollar su trabajo incluso con fines comerciales, siempre que le den crédito y concedan licencias para sus nuevas creaciones bajo los mismos términos. Esta licencia a menudo se compara con las licencias de software libre y de código abierto “copyleft”. Todos los trabajos nuevos basados en el tuyo tendrán la misma licencia, por lo que cualquier derivado también permitirá el uso comercial. Esta es la licencia utilizada por Wikipedia y se recomienda para materiales que se beneficiarían al incorporar contenido de Wikipedia y proyectos con licencias similares.
