DOI:
https://doi.org/10.14483/22487638.18612Published:
2023-07-12Issue:
Vol. 27 No. 76 (2023): April - JuneSection:
ResearchActividades de construcción sencillas desarrolladas por sistemas aéreos no tripulados
Straightforward Construction Activities Developed by Unmanned Aerial Systems
Keywords:
robotics, UAV, UAS, construction, assembly (en).Keywords:
robótica, UAV, UAS, construcción, ensamblaje (es).Downloads
References
Agarwal, R., Chandrasekaran, S. y Sridhar, M. (2016). Imagining construction’s digital future. McKinsey & Company. https://www.mckinsey.com/business-functions/operations/our-insights/imagining-constructions-digital-future#.
Asadi, K., Suresh, A., Ender, A., Gotad, S., Maniyar, S., Anand, S., Noghabaei, M., Han, K., Lobaton, E. y Wu, T. (2020). An integrated UGV-UAV system for construction site data collection. Automation in Construction, 112, 103068. https://doi.org/10.1016/j.autcon.2019.103068. DOI: https://doi.org/10.1016/j.autcon.2019.103068
Augugliaro, F., Zarfati, E., Mirjan, A. y D'Andrea, R. (2015). Knot-tying with flying machines for aerial construction. En 2015 IEEE/RSJ International Conference on
Intelligent Robots and Systems (IROS) (pp. 5917-5922). https://doi.org/10.1109/IROS.2015.7354218. DOI: https://doi.org/10.1109/IROS.2015.7354218
Augugliaro, F., Mirjan, A., Gramazio, F., Kohler, M. y D'Andrea, R. (2013). Building tensile structures with flying machines. En 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems (pp. 3487-3492). https://doi.org/10.1109/IROS.2013.6696853. DOI: https://doi.org/10.1109/IROS.2013.6696853
Augugliaro, F., Lupashin, S., Hamer, M., Male, C., Hehn, M., Mueller, M. W., Willmann, J. S., Gramazio, F., Kohler, M. y D’Andrea, R. (2014). The flight assembled architecture installation: Cooperative construction with flying machines. IEEE Control Systems Magazine, 34, 4, 46-64. https://doi.org/10.1109/MCS.2014.2320359. DOI: https://doi.org/10.1109/MCS.2014.2320359
Becerra, Y. A. (2020). Una revisión de plataformas robóticas para el sector de la construcción. Tecnura, 24(63), 115-132. https://doi.org/10.14483/22487638.15384. DOI: https://doi.org/10.14483/22487638.15384
Becerra, Y. A. y Arbulú, M. R. (2022). Uso de robótica en una emergencia sanitaria. Tecnura, 26(73), 130-141. https://doi.org/ 10.14483/22487638.17320. DOI: https://doi.org/10.14483/22487638.17320
Caraballo, L. E., Díaz-Báñez, J. M., Maza, I. y Ollero, A. (2017). The block-information-sharing strategy for task allocation: A case study for structure assembly with aerial robots. European Journal of Operational Research, 260(2), 725-738. https://doi.org/10.1016/j.ejor.2016.12.049. DOI: https://doi.org/10.1016/j.ejor.2016.12.049
Chermprayong, P., Zhang, K., Xiao, F. y Kovac, M. (2019). An integrated delta manipulator for aerial repair: A new aerial robotic system. IEEE Robotics & Automation Magazine, 26, 1, 54-66. https://doi.org/10.1109/MRA.2018.2888911. DOI: https://doi.org/10.1109/MRA.2018.2888911
Cruz, P. J. y Fierro, R. (2017). Cable-suspended load lifting by a quadrotor UAV: Hybrid model, trajectory generation, and control. Autonomous Robots, 41, 1629-1643. https://doi.org/10.1007/s10514-017-9632-2. DOI: https://doi.org/10.1007/s10514-017-9632-2
Felbrich, B., Frueh, N., Prado, M., Saffarian, S., Solly, J., Vasey, L., Knippers, J. y Menges, A. (2017). Multi-machine fabrication: An integrative design process utilising an autonomous UAV and industrial robots for the fabrication of long span composite structures. En Disciplines & Disruption, ACADIA (Association for Computer Aided Design in Architecture) (pp. 248-259). MIT. http://doi.org/10.5281/zenodo.2667782. DOI: https://doi.org/10.52842/conf.acadia.2017.248
Gabrich, B., Saldaña, D., Kumar, V. y Yim, M. (2018). A flying gripper based on cuboid modular robots. En 2018 IEEE International Conference on Robotics and Automation (ICRA) (pp. 7024-7030). https://doi.org/10.1109/ICRA.2018.8460682. DOI: https://doi.org/10.1109/ICRA.2018.8460682
Gassner, M., Cieslewski, T. y Scaramuzza, D. (2017). Dynamic collaboration without communication: Vision-based cable-suspended load transport with two quadrotors. En 2017 IEEE International Conference on Robotics and Automation (ICRA) (pp. 5196-5202). https://doi.org/10.1109/ICRA.2017.7989609. DOI: https://doi.org/10.1109/ICRA.2017.7989609
Goessens, S., De Furstenberg, T., Manderlier, C., Mueller, C. y Latteur, P. (2017). A few aspects of timber UAV-based Construction. En Intefaces: Architecture, Engineering, Science (IASS) Annual Symposium. Hamburgo, Alemania.
Goessens, S., Mueller, C. y Latteur, P. (2018). Feasibility study for drone-based masonry construction of real-scale structures. Automation in Construction, 94, 458-480. https://doi.org/10.1016/j.autcon.2018.06.015. DOI: https://doi.org/10.1016/j.autcon.2018.06.015
Hunt, G., Mitzalis, F., Alhinai, T., Hooper, P. A. y Kovac, M. (2014). 3D printing with flying robots. En 2014 IEEE International Conference on Robotics and Automation (ICRA) (pp. 4493-4499). https://doi.org/10.1109/ICRA.2014.6907515. DOI: https://doi.org/10.1109/ICRA.2014.6907515
Jiménez-Cano, A. E., Heredia, G. y Ollero, A. (2017). Aeria manipulator with a compliant arm for bridge inspection. En 2017 International Conference on Unmanned Aircraft Systems (ICUAS) (pp. 1217-1222). https://doi.org/10.1109/ICUAS.2017.7991458. DOI: https://doi.org/10.1109/ICUAS.2017.7991458
Jiménez-Cano, A. E., Martin, J., Heredia, G., Ollero, A. y Cano, R. (2013). Control of an aerial robot with multi-link arm for assembly tasks. En 2013 IEEE International
Conference on Robotics and Automation (ICRA) (pp. 4916-4921). https://doi.org/10.1109/ICRA.2013.6631279. DOI: https://doi.org/10.1109/ICRA.2013.6631279
Kim, S., Seo, H., Choi, S. y Kim, H. J. (2016). Vision-guided aerial manipulation using a multirotor with a robotic arm. IEEE/ASME Transactions on Mechatronics, 21(4), 1912-1923. https://doi.org/10.1109/TMECH.2016.2523602. DOI: https://doi.org/10.1109/TMECH.2016.2523602
Kim, S., Seo, H., Shin, J. y Kim, H. J. (2018). Cooperative aerial manipulation using multirotors with multi-DOF robotic arms. IEEE/ASME Transactions on Mechatronics, 23(2), 702-713. https://doi.org/10.1109/TMECH.2018.2792318. DOI: https://doi.org/10.1109/TMECH.2018.2792318
Kiribayashi, S., Yakushigawa, K. y Nagatani, K. (2018). Design and Development of Tether-Powered Multirotor Micro Unmanned Aerial Vehicle System for Remote-Controlled Construction Machine. En M. Hutter y R. Siegwart (eds.), Field and service robotics (pp. 637-648). Springer. https://doi.org/10.1007/978-3-319-67361-5_41. DOI: https://doi.org/10.1007/978-3-319-67361-5_41
Kondak, K., Huber, F., Schwarzbach, M., Laiacker, M., Sommer, D., Bejar, M. y Ollero, A. (2014). Aerial manipulation robot composed of an autonomous helicopter and a 7 degrees of freedom industrial manipulator. En 2014 IEEE International Conference on Robotics and Automation (ICRA) (pp. 2107-2112). https://doi.org/10.1109/ICRA.2014.6907148. DOI: https://doi.org/10.1109/ICRA.2014.6907148
Krizmancic, M., Arbanas, B., Petrovic, T., Petric, F. y Bogdan, S. (2020). Cooperative aerial-ground multi-robot system for automated construction tasks. IEEE Robotics and Automation Letters, 5(2), 798-805. https://doi.org/10.1109/LRA.2020.2965855. DOI: https://doi.org/10.1109/LRA.2020.2965855
Lallement, R., Cortés, J., Gharbi, M., Boeuf, A., Alami, R., Fernandez-Aguera, C. J. y Maza, I. (2019). Combining assembly planning and geometric task planning. En A. Ollero y B. Siciliano (eds.), Aerial robotic manipulation (pp. 299-316). Springer. https://doi.org/10.1007/978-3-030-12945-3_22. DOI: https://doi.org/10.1007/978-3-030-12945-3_22
Lindsey, Q. y Kumar, V. (2013). Distributed construction of truss structures. En E. Frazzoli, T. Lozano-Pérez, N. Roy y D. Rus (eds.), Algorithmic foundations of robotics X (pp. 209-225). Springer Verlag. https://doi.org/10.1007/978-3-642-36279-8_13. DOI: https://doi.org/10.1007/978-3-642-36279-8_13
Lindsey, Q., Mellinger, D. y Kumar, V. (2011). Construction of cubic structures with quadrotor teams. En H. Durrant-Whyte, N. Roy y P. Abbeel (eds.). Robotics: Science and systems VII (pp. 177-184). MIT Press. DOI: https://doi.org/10.7551/mitpress/9481.003.0028
Marina, H. G. y Smeur, E. (2019). Flexible collaborative transportation by a team of rotorcraft. En 2019 International Conference on Robotics and Automation (ICRA) (pp. 1074-1080). https://doi.org/10.1109/ICRA.2019.8794316. DOI: https://doi.org/10.1109/ICRA.2019.8794316
Masone, C., Bülthoff, H. H. y Stegagno, P. (2016). Cooperative transportation of a payload using quadrotors: A reconfigurable cable-driven parallel robot. En 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) (pp. 1623-1630). https://doi.org/10.1109/IROS.2016.7759262. DOI: https://doi.org/10.1109/IROS.2016.7759262
Maxim, A., Lerke, O., Prado, M., Dorstelmann, M., Menges, A. y Schwieger, V. (2017). UAV Guidance with robotic total station for architectural fabrication processes. En A. Hassan (ed.), Unmanned aerial vehicles 2017 (pp. 145-161). Wißner-Verlag.
Mellinger, D., Shomin, M., Michael, N. y Kumar, V. (2013). Cooperative grasping and transport using multiple quadrotors. En A. Martinoli et al. (eds.), Distributed autonomous robotic systems (pp. 545-558). Springer. https://doi.org/10.1007/978-3-642-32723-0_39. DOI: https://doi.org/10.1007/978-3-642-32723-0_39
Michael, N., Fink, J. y Kumar, V. (2011). Cooperative manipulation and transportation with aerial robots. Autonomous Robots – AROBOTS, 30, 73-86. https://doi.org/10.1007/s10514-010-9205-0. DOI: https://doi.org/10.1007/s10514-010-9205-0
Mirjan, A., Gramazio, F., Kohler, M., Augugliaro, F. y D’Andrea, R. (2013). Architectural fabrication of tensile structures with flying machines. En T. Ferreira (eds), Green design, materials and manufacturing processes (pp. 513-518). CRC Press. DOI: https://doi.org/10.1201/b15002-99
Mirjan, A., Augugliaro, F., D’Andrea, R., Gramazio, F. y Kohler, M. (2016). Building a Bridge with Flying Robots. En D. Reinhardt, R. Saunders y J. Burry (eds.), Robotic fabrication in architecture, art and design 2016 (pp. 34-47). Springer. https://doi.org/10.1007/978-3-319-26378-6_3. DOI: https://doi.org/10.1007/978-3-319-26378-6_3
Muñoz-Morera, J., Maza, I., Fernández-Aguera, C.J., Caballero, F. y Ollero, A. (2015). Assembly planning for the construction of structures with multiple UAS equipped with robotic arms. En 2015 International Conference on Unmanned Aircraft Systems (ICUAS) (pp. 1049-1058). https://doi.org/10.1109/ICUAS.2015.7152396. DOI: https://doi.org/10.1109/ICUAS.2015.7152396
Nguyen, T., Catoire, L. y Garone, E. (2019). Control of a quadrotor and a ground vehicle manipulating an object. Automatica, 105, 384-390. https://doi.org/10.1016/j.automatica.2019.04.011. DOI: https://doi.org/10.1016/j.automatica.2019.04.011
Ollero, A. (11 de octubre de 2012). Aerial robotics cooperative assembly system (ARCAS): First results. Aerial Physically Acting Robots (AIRPHARO) [Workshop]. International Conference on Robotics (IROS), Vilamoura, Portugal.
OxfordEconomics.com. (2021). Future of construction: A global forecast for construction to 2030. https://www.oxfordeconomics.com/resource/future-of-construction/.
Pietri, S. y Erioli, A. (2017). Fibrous aerial robotics. En 35th International Conference on Education and Research in Computer Aided Architectural Design in Europe/Design Tools – Robotics, 1, 689-698).
Ritz, R. y D'Andrea, R. (2013). Carrying a flexible payload with multiple flying vehicles. En 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems (pp. 3465-3471). https://doi.org/10.1109/IROS.2013.6696850. DOI: https://doi.org/10.1109/IROS.2013.6696850
Sanalitro, D., Savino, H. J., Tognon, M., Cortés, J. y Franchi, A. (2020). Full-pose manipulation control of a cable-suspended load with multiple UAVs under uncertainties. IEEE Robotics and Automation Letters, 5(2), 2185-2191. https://doi.org/10.1109/LRA.2020.2969930. DOI: https://doi.org/10.1109/LRA.2020.2969930
Staub, N., Bicego, D., Sablé, Q., Arellano-Quintana, V., Mishra, S. y Franchi, A. (2018). Towards a flying assintant paradigm: The OTHex. En 2018 IEEE International Conference on Robotics and Automation (ICRA) (pp. 6997-7002). http://doi.org/10.1109/ICRA.2018.8460877. DOI: https://doi.org/10.1109/ICRA.2018.8460877
Staub, N., Mohammadi, M., Bicego, D., Delamare, Q., Yang, H., Prattichizzo, D., Giordano, P. R., Lee, D. y Franchi, A. (2018). The Tele-MAGMaS: An aerial-ground comanipulator system. IEEE Robotics & Automation Magazine, 25(4), 66-75. http://doi.org/10.1109/MRA.2018.2871344. DOI: https://doi.org/10.1109/MRA.2018.2871344
Tagliabue, A., Kamel, M., Verling, S., Siegwart, R. y Nieto, J. (2017). Collaborative transportation using MAVs via passive force control. En 2017 IEEE International Conference on Robotics and Automation (ICRA) (pp. 5766-5773). https://doi.org/10.1109/ICRA.2017.7989678. DOI: https://doi.org/10.1109/ICRA.2017.7989678
Tagliabue, A., Kamel, S., Siegwart, R. y Nieto, J. (2019). Robust collaborative object transportation using multiple MAVs. The International Journal of Robotics Research, 38(9), 1020-1044. https://doi.org/10.1177/0278364919854131. DOI: https://doi.org/10.1177/0278364919854131
Tan, Y. H., Lai, S., Wang, K. y Chen, B.M. (2018). Cooperative control of multiple unmanned aerial systems for heavy duty carrying. Annual Review in Control, 46, 44-57. https://doi.org/10.1016/j.arcontrol.2018.07.001. DOI: https://doi.org/10.1016/j.arcontrol.2018.07.001
Thapa, S., Bai, H. y Acosta, J. A. (2019). Cooperative aerial manipulation with decentralized adaptive force-consensus control. Journal of Intelligent and Robotic Systems, 97, 171-183. https://doi.org/10.1007/s10846-019-01048-4. DOI: https://doi.org/10.1007/s10846-019-01048-4
How to Cite
APA
ACM
ACS
ABNT
Chicago
Harvard
IEEE
MLA
Turabian
Vancouver
Download Citation
Recibido: 24 de septiembre de 2021; Aceptado: 20 de septiembre de 2022
Resumen
Contexto:
Los vehículos aéreos no tripulados (UAV, por sus siglas en inglés) han tomado gran relevancia en los últimos años, al integrarse en diversos sectores de la economía, como el agrícola, energético, público, construcción, entre otros. Precisamente, en este último sector, se han venido realizando avances que permiten la manipulación, transporte e identificación de elementos propios del sector, así como la cooperación entre distintos robots aéreos o robots terrestres para solucionar el problema de límite de carga, asociado a los UAV.
Método:
Este trabajo está dividido en cuatro categorías en las que los UAV y los sistemas aéreos no tripulados (UAS, por su sigla en inglés) han aportado al desarrollo de actividades de construcción de forma autónoma. Se realiza una búsqueda exhaustiva mediante Google Scholar empleando palabras claves tales como “UAV”, “robotics”, “UAS”, “construction”, “cooperation”, “architecture” y “assembly”, las cuales permiten identificar trabajos desarrollados en este campo. En la búsqueda se realiza combinaciones entre las distintas palabras con el fin de reducir el amplio panorama que se presenta al utilizar tan solo una de ellas.
Resultados:
Se obtiene un panorama de diversos sistemas aéreos no tripulados que ejecutan tareas simples que conlleven la automatización del sector de la construcción; en ese sentido, se enumeran las características, virtudes y limitantes actuales de estos sistemas, así como, los desafíos que se proponen a futuro.
Conclusiones:
El mercado actual de UAV está orientado principalmente a sistemas teleoperados; sin embargo, centros de investigación han venido desarrollando UAV y UAS más autónomos. La baja capacidad de carga de estos sistemas ha sido compensada con la cooperación entre robots aéreos, terrestres e, inclusive, humanos. Dicha cooperación exige la creación de algoritmos que coordinen todos los agentes que intervienen en el sistema. Se deben tener en cuenta las condiciones del entorno de construcción, así como, la precisión y estabilidad de estos sistemas.
Palabras clave:
robótica, UAV, UAS, construcción, ensamblaje.Abstract
Context:
Unmanned aerial vehicles (UAV) have become very important in recent years, integrating these robots into various sectors of the economy, such as agriculture, energy, public, construction, among others; precisely in this last mentioned sector (construction), advances have been made, allowing the manipulation, transport and identification of building elements, as well as cooperation between different aerial robots and/or ground robots to solve the payload limit problem, associated with UAVs.
Method:
This paper is divided into four categories where UAVs and UAS have been contributing to the development of construction activities autonomously. The first category presents works in which UAS build modular architectural structures; the second category exposes works in which UAVs are equipped with robotic arms to perform manipulation tasks; the third category presents works of cooperation between aerial robots and robots; finally, the fourth category presents unmanned aerial systems for payload transportation.
Results:
An overview of various unmanned aerial systems is obtained by performing simple tasks that lead to the automation of the construction sector. The current characteristics, virtues and limitations of these systems are shown, as well as the challenges that are proposed for the future.
Conclusions:
The current market for UAVs is mainly oriented towards teleoperated systems; however, research centers have been developing more autonomous UAVs and UASs. The low payload capacity of these systems has been compensated with the cooperation between aerial, terrestrial and even human robots. This same cooperation requires the creation of algorithms that coordinate all the agents that intervene in the system. The conditions of the construction environment must be taken into account, as well as the precision and stability of these systems.
Keywords:
robotics, UAV, UAS, construction, assembly.INTRODUCCIÓN
La robótica se ha abierto un espacio en el sector de la construcción en los últimos años; diversos grupos de investigación e inclusive compañías como ABB y KUKA, le están apostando al desarrollo de plataformas robóticas que respondan a las necesidades y exigencias de este sector. Gran parte de los esfuerzos se ha centrado en generar mayor autonomía para robots industriales en entornos cambiantes, por medio de sensores y algoritmos de control; emplear brazos robóticos y efectores finales para la elaboración de geometrías complejas; y desarrollar robots para asistir humanos en tareas de demolición u oficios riesgosos (Becerra, 2020). Estos desarrollos responden a plataformas robóticas terrestres; sin embargo, la robótica aérea también viene trabajando en el desarrollo de plataformas que permitan contribuir al crecimiento de esta industria.
Según OxfordEconomics.com(2011), el sector de la construcción impulsará la economía global en la presente década (2021-2030), con un crecimiento a mayor ritmo que los sectores de manufactura y servicios; no obstante, este sector presenta problemas de ineficiencia; grandes proyectos de construcción toman regularmente hasta un 20 % más de tiempo para ser finalizados, y sobrepasan hasta en un 80 % su presupuesto inicial (Agarwal et al., 2016). Una de las tecnologías que promete ser clave para avanzar en esta industria es la robótica, con procesos más eficientes, precisos y seguros; con la reducción de costos y la optimización de tiempos. Debido a la crisis provocada por la covid-19, el uso de los UAV (unmanned aerial vehicles) se intensificó, ya que diversas compañías los adoptaron para realizar labores de vigilancia o transporte de carga (Becerra y Arbulú, 2022); aunque, estos sistemas ya venían siendo utilizados en el sector de la construcción para labores de monitoreo, inspección, topografía, levantamiento de datos, entre otras; apoyándose principalmente en sensores como cámaras RGB, multiespectrales, térmicas y lídar.
No obstante, este artículo se centra en el uso de sistemas aéreos no tripulados para ejecutar labores como ensamblaje y reparación de estructuras, levantamiento y transporte de carga, y cooperación robótica.
A diferencia de los robots industriales, los UAV cuentan con un espacio de trabajo virtualmente infinito, lo cual les permite llegar a cualquier punto del entorno de construcción; sin embargo, la manipulación de carga y la precisión en sus tareas son desafíos que tienen estos sistemas. Al pensar en construir una estructura inmobiliaria a escala real o una obra civil (puentes, represas, vías, etc.), se conoce que los elementos a manipular para ello son pesados; por tanto, un UAV debe ser de grandes dimensiones o se debe emplear un enjambre de estos (como se expone más adelante). Además, el ser un sistema que desarrolla sus tareas en el aire, lleva a tener en cuenta las perturbaciones que generan las corrientes de viento, y que pueden hacer al sistema inestable. Otro de los desafíos que se presenta con estos sistemas es su limitado tiempo de vuelo, debido a las baterías que existen actualmente en el mercado.
El presente trabajo está dividido en cinco secciones: la primera muestra la construcción de estructuras con sistemas aéreos no tripulados (UAS, por su sigla en inglés); la segunda presenta brazos robóticos integrados en UAV para realizar tareas de ensamblaje; la tercera describe trabajos de cooperación entre robots aéreos y terrestres; la cuarta trata sobre el trabajo cooperativo entre múltiples UAV y algoritmos de control para el transporte de carga; finalmente, la quinta sección ofrece algunas conclusiones.
LEVANTAMIENTO DE ESTRUCTURAS CON UAS
En los últimos años, ha venido creciendo el interés por desarrollar estructuras inmobiliarias con brazos robóticos, los cuales permiten optimizar tiempos de entrega y realizar acabados más precisos; sin embargo, su espacio de trabajo ha sido una limitante para la construcción de grandes estructuras. Una posible solución a esta problemática se encuentra en emplear UAS, ya que estos sistemas cuentan con un espacio de trabajo mucho más amplio que el de los brazos robóticos, y se ve limitado solamente por su tiempo de vuelo.
En el trabajo presentado en Willmann et al. (2012) y Augugliaro et al. (2014), se construyó una torre de seis metros de altura, con 1500 ladrillos de espuma (figura 1). La construcción de la estructura fue ejecutada por una flota de cuadricópteros, la cual empleó sensores como cámaras, GPS y lídar, para guiar a cada uno de los vehículos a locaciones específicas para recoger y dejar los módulos (ladrillos). Cada uno de los cuadricópteros contaba con una pinza para poder manipular los módulos, y eran guiados por un algoritmo que traducía el diseño computacional de la torre (geometría compleja) a puntos en el espacio.

Figura 1: Torre construida de forma autónoma por una flota de UAV
En lugar de transportar ladrillos de un punto a otro, es posible dotar al UAV con un mecanismo dispensador de cable o cuerda, que le permita ir alrededor de objetos existentes y construir estructuras tensadas (Mirjan et al. (2013). Diversos UAV participan en la tarea propuesta, lo cual exige comunicación y sincronización de acciones entre ellos. El entorno donde se llevaron a cabo los experimentos cuenta con un sistema de captura de movimiento que permite el seguimiento a las trayectorias deseadas en los UAV. La estructura tensada debe ser asegurada; por tanto, se debe representar y realizar nudos con el UAS, el cual debe contener información de la tipología del nudo, en la trayectoria a realizar (Augugliaro et al. (2015). Estas trayectorias requieren estrategias de control híbridas fuerza/posición, que permitan aplicar la fuerza deseada en la posición requerida para la elaboración del nudo Augugliaro et al. (2013). La estructura tensada puede ser empleada para la construcción de un puente, tal y como se ve en (Mirjan et al. (2016). En este se construyen los elementos primarios del puente entre dos estructuras de soporte distantes; posteriormente, los UAV se encargan de reforzar el montaje, trenzando los elementos primarios entre sí (figura 2).

Figura 2: Torre construida de forma autónoma por una flota de UAV
En los trabajos propuestos en Lindsey et al (2011), y Lindsey y Kumar (2013),se construyen estructuras de tipo celosía con un equipo de cuadricópteros. Estas estructuras son livianas, cuentan con partes estandarizadas y se aseguran entre ellas por medio magnético (figura 3); los UAV cuentan con pinzas para levantar, transportar y ensamblar los elementos de la estructura; y se emplea un sistema de seguimiento de movimiento para estimar el estado del UAV, así como para estimar la posición y orientación de los contenedores de las piezas. El ensamblaje de la estructura depende de información local, más no global, de su estado; además, es posible construir distintas configuraciones de la celosía.

Figura 3: UAV transportando pieza (izq.). Estructura con aseguramiento magnético (der.)
Como ya se mencionó, una de las ventajas de utilizar UAS en un entorno de construcción es su gran espacio de trabajo, lo cual permite fabricar estructuras de gran envergadura. En Maxim et al. (2017) se propone emplear una robotic total station para el guiado y control de un UAV en el devanado de fibra, que permita procesos de fabricación automatizados de estructuras arquitectónicas ligeras in situ. Por su parte, Pietri y Erioli (2017) proponen depositar material fibroso sobre encofrados inflables, mediante el empleo de enjambres de UAV, para la fabricación de envolventes arquitectónicos a gran escala. Con el uso del gran espacio de trabajo en estos sistemas y uno de seguimiento de movimiento, Hunt et al. (2014) plantean utilizar un UAV que deposite espuma expansiva de poliuretano en medio del vuelo, lo cual facilita imprimir estructuras para cerrar brechas en terrenos discontinuos y reparar superficies deterioradas en áreas que son inaccesibles por robots terrestres; sin embargo, se presentan algunos desafíos como estabilidad de vuelo y precisión del sistema.
Uno de los problemas al emplear UAS en labores de construcción es la baja capacidad de carga que estos tienen; Goessens et al. (2017) presentan un UAV de 12 kg y una capacidad de carga de 20 kg. Otro inconveniente es la falta de precisión de estos sistemas; para ello, Goessens et al. sugieren utilizar diversos elementos (sensor láser, sistema de captura de movimiento, GPS, sistema cinemático en tiempo real y una robotic total station), para el posicionamiento del UAV. El rediseñar los módulos para ser ensamblados en una estructura arquitectónica también ayuda a lidiar con el problema de precisión (figura 4); en Goessens et al. (2017) se plantean módulos de madera con conexiones especiales que permita a los UAV soltar la pieza y que esta encaje en otras fácilmente, gracias a su configuración geométrica.

Figura 4: Módulos de madera (izq.). UAV transportando módulo de fácil ensamblado (med.). UAV con dispensador de espuma expansiva (der.)
TAREAS DE ENSAMBLAJE CON UAV EQUIPADOS CON MANIPULADORES
Como es bien conocido, los brazos robóticos son sistemas precisos y con una alta capacidad de carga; sin embargo, presentan limitaciones en su espacio de trabajo, lo cual puede ser resuelto por un UAV. El sector de la construcción demanda tareas en donde, capacidad de carga, precisión y espacio de trabajo amplio son requeridos; por tal razón, se han desarrollado sistemas híbridos entre brazos robóticos y UAV.
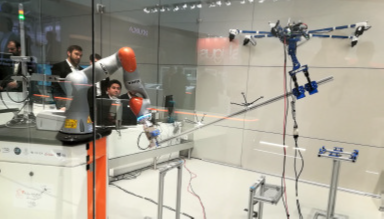
Kondak et al. (2018), se articula un helicóptero autónomo con un brazo robótico, lo cual requiere de un acople cinemático y dinámico para controlar el sistema; se emplea GPS para que el helicóptero vuele a una posición específica; posteriormente, se activa el sistema de visión y seguimiento para el reconocimiento de objetos. La tarea de controlar un UAV, teniendo en cuenta el movimiento del brazo robótico, se expone en Jiménez-Cano et al. (2013); sistema diseñado para tareas de ensamblaje.
También han sido empleados para tareas de inspección en obras civiles. Jiménez-Cano et al. (2017) utilizan un brazo robótico en la parte superior de un UAV, para tomar mediciones de deflexión en la parte baja de la viga de un puente. Chermprayong et al. (2019) emplean un UAV con un manipulador paralelo integrado y un sistema de extrusión, para reparaciones aéreas, por ejemplo, grietas en tuberías. En el trabajo propuesto por Kim et al. (2016), se recurre a un UAV equipado con un brazo robótico y una cámara instalada con una configuración eye-inhand, para realizar manipulación aérea (sujeción y transporte de objetos). La posición se estima a través de un sistema de captura de movimiento, mientras que la velocidad deseada depende de la información visual proveniente de la cámara.

Figura 5: Helicóptero autónomo con brazo robótico (izq.). UAV con brazo robótico (der.)

Figura 6: UAV realizando manipulación área (izq.). UAV para la inspección de vigas (der.)
El proyecto ARCAS (Ollero, 2012) fue otro referente que se enfocó en tareas de manipulación y montaje, con cuadricópteros o helicópteros con un brazo de enlace múltiple unido a la parte inferior del robot aéreo. Además, se propuso realizar tareas cooperativas entre distintos UAV que sujetaran distintas partes de una estructura y la transportaran, a la respectiva locación del ensamblaje. El problema de planificación cooperativa para el ensamblado de estructuras en el proyecto ARCAS es tratado por Lallement et al. (2019).
En Muñoz-Morera et al. (2015), se asignan tareas de ensamblaje a diversos UAV equipados con brazos robóticos, con el fin de maximizar el paralelismo y cooperación entre ellos, para la construcción de estructuras en lugares donde el acceso es difícil por medios convencionales. Por su parte, Caraballo et al. (2017) sugieren la construcción autónoma de una estructura de celosía con una flota de UAV equipados con brazos robóticos; además de un enfoque distribuido, en el cual se reasigna la tarea si se presenta algún problema con uno de los UAV. Continuando en la misma línea de trabajo cooperativo, Kim et al. (2018) plantean la manipulación de un objeto en forma de vara entre dos UAV dotados con brazos robóticos; a través del diseño de un control descentralizado, un planificador de rutas y un estimador de fuerzas internas en el sistema.

Figura 7: Simulaciones de UAS en el ensamblaje de estructuras
Si bien hasta el momento se han presentado trabajos en donde el UAV es equipado con un brazo robótico, es pertinente también mencionar el trabajo desarrollado por Felbrich et al. (2017), en el cual se expone una colaboración entre UAV y brazo robótico para la construcción de una estructura tipo voladizo, compuesta de fibra a través de un bobinado de filamento sin núcleo; el UAV se encarga de transportar el material, mientras que el brazo robótico realiza las tareas de colocación y tensado de material.
COOPERACIÓN ENTRE ROBOTS TERRESTRES Y AÉREOS
En esta sección se presenta trabajos de cooperación entre UGV (unmanned ground vehicle) y UAS, para tareas autónomas útiles en el sector de la construcción. Se puede manifestar que estos dos sistemas se complementan, ya que la baja capacidad de carga del UAS la compensa el UGV, mientras que el limitado espacio de trabajo del UGV, lo compensa el UAS.
En el trabajo presentado por Staub et al. (2018), se propone emplear un UAV para el levantamiento de barras rígidas que asista tanto a operadores humanos, como a UGV para la manipulación y el desplazamiento de estas, en tareas de ensamblaje y mantenimiento. Yang et al. (2018)describen una extensión de este trabajo, el cual se enfoca en la manipulación de carga con flexibilidad, para objetos largos y delgados, llegando a cancelar las vibraciones producidas en el sistema debido a la manipulación de mencionados objetos. En Staub et al. (2018), se expone una comanipulación aérea-terrestre, para el levantamiento y desplazamiento de una barra de 2,5 m de largo; esto implica intercambio de fuerzas que necesitan ser tratadas con cuidado para evitar inestabilidad en el sistema. Cabe aclarar que, para estos tres trabajos, se emplean brazos robóticos tanto en el UAS, como en el UGV.
Una de las limitantes que se presentan en los UAV es su limitado tiempo, debido a la capacidad energética de sus baterías. Kiribayashi et al. (2018) proponen emplear un micro-UAV accionado por cable (debido a su corto periodo de vuelo), para obtener imágenes desde varias perspectivas, para el operador de una máquina de construcción teleoperada. En Asadi et al. (2020) , se presenta un sistema autónomo compuesto por UAV+UGV, para la recolección de información en entornos de construcción desordenados; el UAV sigue la ruta establecida por el UGV y actúa como un ojo externo para este, mientras que el UGV define su localización a través de una cámara monocular integrada con una IMU.

Figura 8: Manipulación de una barra entre un UGV y un UAS

Figura 9: UAV+UGV para la recolección de información en entornos de construcción (izq). Máquina de construcción teleoperada con asistencia de un Micro UAV (der.)
En Krizmancic et al. (2020), se tiene un sistema cooperativo aéreo-terrestre, para la construcción automatizada de una pared con una estructura predefinida, empleando ladrillos de distintos tamaños y pesos; la tarea es realizada por un UGV y tres UAV en un entorno simulado. Por su parte, Nguyen et al. (2019) presentan un esquema de control para el posicionamiento y orientación de una varilla de carbón, por medio del trabajo colaborativo entre un UGV y un UAV.
CONTROL EN TRANSPORTE DE CARGA PARA UAS
Una de las tareas más requeridas en un entorno de construcción es el transporte de carga entre dos puntos; como ya se había mencionado, una de las limitantes en UAS es precisamente su capacidad de carga; por tanto, se debe pensar en una serie de estrategias que brinden solución a este requerimiento. A continuación, se expone brevemente una serie de trabajos al respecto.
En Tan et al. (2018), se plantea un transporte cooperativo de una carga en forma de cuadrado, con cuatro UAV ubicados en cada una de sus esquinas e inclinados hacia el centro de esta, más otro UAV encargado de la estrategia de control centralizado, ubicado en el centro de la carga. Además, la navegación del sistema emplea un escáner láser y SLAM. En Mellinger et al. (2013), se sugiere el control de múltiples cuadricópteros que cooperativamente sujeten, estabilicen y transporten una estructura en madera en una trayectoria tridimensional, para ello se apoyan en un sistema de captura de movimiento para estimar la posición y orientación de cada cuadricóptero. En Ritz y D’Andrea (2013), se transporta un anillo delgado y flexible con seis UAV adjuntos, mediante un sistema de seguimiento de movimiento, para estimar la posición y altitud de cada uno de los UAV.
Thapa et al. (2019) presentan una simulación numérica de un control de fuerza adaptativo descentralizado, para la manipulación y transporte de una carga rígida o flexible; por tanto, sugieren que la masa de cada UAV se adicione a la masa total de la carga, lo que garantiza un empuje proporcional para el levantamiento de la carga.

Figura 10: Trabajo cooperativo entre UAV para el transporte de carga
Michael et al. (2011) presentan el control de múltiples UAV en las tareas de manipulación y transporte de una carga por medio de cables; así, se asegura su equilibrio estático en una posición deseada, se analiza su estabilidad y se tienen en cuenta las limitantes de la tensión; un sistema de captura de movimiento es utilizado para estimar la localización de los UAV (figura 11). En Marina et al. (2019), se trabaja un sistema compuesto por cuatro UAV, el cual transporta un objeto suspendido dos veces más pesado que la máxima carga para cada uno de los UAV; se emplea un sistema de captura de movimiento, para obtener la localización de los UAV. Por su parte, Masone et al. (2016) plantean utilizar cables para transportar carga con los UAV, en lugar de dotarlos con manipuladores; además de proveer mayor libertad al equipo de UAV; se emplea un algoritmo de distribución de tensión, el cual permite relacionar el movimiento de los UAV con el de la carga; finalmente, la fase de experimentación es llevada a cabo con ocho UAV.
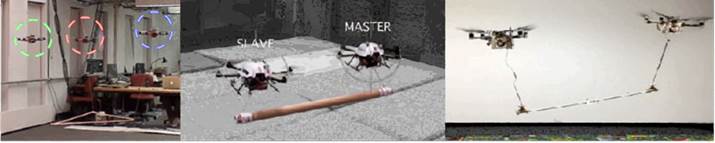
Figura 11: Transporte de carga suspendida por medio de UAV
Tagliabue et al. (2017) proponen emplear dos micro-UAV, mientras que Tagliabue et al. (2019) sugieren cinco en un entorno simulado para el transporte colaborativo de un objeto voluminoso, sin tener en cuenta la forma, ni la posición del punto de ajuste. Además, los micro-UAV no necesitan comunicarse entre ellos, debido a sus capacidades sensoriales, y a la utilización de un sistema de navegación visual inercial para la estimación de fuerzas. En Gassner et al. (2017), igualmente se propone el transporte de una carga suspendida empleando dos UAV, sin existir comunicación entre ellos, pero sí teniendo en cuenta pistas inerciales y visuales obtenidas de sus sensores (figura 11). Tognon et al. (2018) trabajan una manipulación cooperativa descentralizada de una carga suspendida por cables, empleando dos UAV sin comunicación explícita; se presenta una arquitectura maestro-esclavo y se tienen en cuenta las fuerzas generadas en los cables para el control del sistema.
Por su parte, Sanalitro et al. (2020) exponen la necesidad de controlar la posición y orientación de la carga en tareas de ensamblado o construcción con UAS, así como de tener una alta precisión y compensar las perturbaciones externas. Para ello emplean tres UAV conectados cada uno a un par de cables y un sistema de captura de movimiento; el sistema está en la capacidad de realizar trayectorias donde la plataforma se traslade y oriente en distintas direcciones. La maniobra para el levantamiento de carga suspendida recibe atención en Cruz y Fierro (2017), donde se presenta una metodología compuesta por tres estados (configurar, tirar y levantar), la cual permite generar una trayectoria para llevar a cabo la tarea propuesta.
Hasta el momento se han presentado trabajos donde la carga a transportar es sujetada por los UAV, ya sea de forma manual o con grippers; sin embargo, en Gabrich et al. (2018), se propone una plataforma modular aérea, compuesta por cuatro cuadricópteros, capaz de sujetar y transportar objetos, descentralizando el control de apertura y orientación en cada uno de los UAV.

Figura 12: Flying gripper transportando una taza de café
CONCLUSIONES
Los UAV han venido integrándose exitosamente al sector de la construcción en los últimos años; sin embargo, la gran mayoría de tareas (monitoreo, inspección, levantamiento de datos, topografía, etc.) que desempeñan actualmente son teleoperadas. Desde los centros de investigación, se ha avanzado en hacer que los robots aéreos sean más autónomos, para ello se ha recurrido a sensores que brinden mayor información del entorno, modelos matemáticos más robustos, técnicas de control avanzado y algoritmos de inteligencia artificial.
En el presente trabajo se observa que los UAV no solo son capaces de ejecutar las tareas mencionadas previamente, sino que además pueden llevar a cabo labores donde interactúan directamente con los elementos de la construcción, por ejemplo, levantamiento, transporte y posicionamiento de carga. Al observar que una de las limitantes para los UAV es la baja capacidad de carga, se presentan trabajos cooperativos entre los mismos UAV o, incluso, con plata-formas robóticas móviles y brazos robóticos, para que así se distribuya la fuerza requerida en la tarea.
El transporte de carga cooperativo en UAS es una tarea que exige la coordinación de todos los agentes que participan en ella; por consiguiente, uno de los campos que mayor atención ha tenido en los últimos años para este tipo de tareas con estos sistemas son los algoritmos de control. Si bien, inicialmente, se emplearon y aún se emplean sensores que brindan información suficiente para poder controlar los UAS en un entorno confinado, en un entorno real o abierto, estos mismos sensores no pueden emplearse; razón por la cual se han venido desarrollando modelos matemáticos robustos que ofrezcan una cooperación entre UAV sin la necesidad de contar con sensores externos a ellos.
Al tener un entorno dinámico como lo es el de la construcción, se propone trabajar en UAS que reconozcan obstáculos, no solo estáticos, sino también dinámicos; esto generará una mayor colaboración con el ser humano. Además, se deben tener en cuenta las condiciones ambientales y el polvo característico que se encuentra en este medio. Sensores como cámaras, lídar, infrarrojos, entre otros, pueden ayudar a ello.
Las tareas de reparación es otro campo por explotar a partir de robots aéreos trabajando en el sector de la construcción; la precisión y estabilidad del sistema son características relevantes al realizar este tipo de tareas; por consiguiente, técnicas de visión por computador, control e inteligencia artificial, han de ser tenidas en cuenta para dar solución a las necesidades que se manifiestan.
Con respecto a la cooperación robótica en el entorno de la construcción, no solo se debe seguir trabajando en sistemas autónomos compuestos por robots aéreos y terrestres, sino que también se debe pensar en generar redes de comunicación que permitan al sistema conocer el estado de cada uno de los agentes participantes, así como el avance de la obra.
REFERENCIAS
License
Copyright (c) 2023 Tecnura Journal

This work is licensed under a Creative Commons Attribution-ShareAlike 4.0 International License.
Esta licencia permite a otros remezclar, adaptar y desarrollar su trabajo incluso con fines comerciales, siempre que le den crédito y concedan licencias para sus nuevas creaciones bajo los mismos términos. Esta licencia a menudo se compara con las licencias de software libre y de código abierto “copyleft”. Todos los trabajos nuevos basados en el tuyo tendrán la misma licencia, por lo que cualquier derivado también permitirá el uso comercial. Esta es la licencia utilizada por Wikipedia y se recomienda para materiales que se beneficiarían al incorporar contenido de Wikipedia y proyectos con licencias similares.
