DOI:
https://doi.org/10.14483/23448393.14542Publicado:
2019-05-26Número:
Vol. 24 Núm. 2 (2019): Mayo - AgostoSección:
Ingeniería Catastral y GeodesiaGeneración de Nubes de Puntos 3D con Escáner Laser Terrestre. Georreferenciación y Evaluación de la Calidad
Generation of 3D Point Clouds with Terrestrial Laser Scanner. Georeferencing and Quality Evaluation
Descargas
Referencias
G. L. Heritage and R. G. Large., Laser Scanning for the Environmental Sciences. West Sussex: Blackwell Publishing Ltd., 2009.
J. Roˇser, “Application of terrestrial laser scanning in documenting an underground coal mine pumping sta-tion”. RMZ – M&G. vol. 64, no. 2, 2017.
J. Shan and C. K. Toth (Eds.), Topographic Laser Ranging and Scanning: principles and Processing. Boca Raton: CRC Press Taylor and Francis Group, 2008.
G. Vosselman and H. Maas, Airborne and terrestrial laser scanning. Scotland: CRC Press, 2010.
R Müller. Compendio general de topografía teórico-práctica. Triangulación y Nivelación terrestre y subterránea. Buenos Aires: El Ateneo.
Instituto Geográfico Nacional. Enero de 2010. [En línea]. Disponible en: http://www.ign.gob.ar/archivos/ramsac/estacion2.php?estacion=LPGS
J. J. Arranz, Diseño, optimización y análisis de sistemas basados en técnicas láser, para el modelado geométrico, registro y documentación, aplicados a entidades de interés patrimonial, Tesis doctoral, Universidad Politécnica de Madrid, Madrid, 2013.
L. Ramos, M. Marchamalo, J. G. Rejas y R. Martínez. “Aplicación del Láser Escáner Terrestre (TLS) a la modelización de estructuras: precisión, exactitud y diseño de la adquisición de datos en casos reales”, Informes de la Construcción, vol. 67, no. 538, 2015.
Cómo citar
APA
ACM
ACS
ABNT
Chicago
Harvard
IEEE
MLA
Turabian
Vancouver
Descargar cita
Recibido: 28 de febrero de 2019; Revisión recibida: 26 de abril de 2019; Aceptado: 30 de abril de 2019
Resumen
Contexto:
La técnica LiDAR (siglas del inglés Light Detection and Ranging) permite el modelado 3D de estructuras con un nivel de resolución inédito y precisión milimétrica. Esta tecnología está naturalmente relacionada con la agrimensura, más aún cuando los modelos forman parte de espacios georreferenciados con respecto a sistemas de referencia geodésicos y verticales. Diferentes mediciones LiDAR deben ser vinculadas geométricamente con técnicas topográficas clásicas o geodésicas como GNSS (por sus siglas en inglés), lo que condiciona la calidad geométrica externa del modelo integrado. La comparación en el tiempo de modelos 3D de precisión milimétrica requiere de un conocimiento de los sistemas de referencia con, por lo menos, el mismo nivel de confianza. En consecuencia, la exactitud de las determinaciones debe ser validada.
Método:
Se relevaron dos edificios pertenecientes a la Universidad Nacional de la Plata mediante LiDAR terrestre estático, estos escáneres miden la superficie directamente visible y el relevamiento completo de un objeto requiere de varias estaciones de registro; el producto final resulta del empate de los diferentes escaneos. Para ello existen distintas técnicas, la utilizada en este trabajo es la de elementos comunes identificables desde estaciones aledañas; los resultados son expresados en un marco de referencia terrestre a partir de una poligonal de apoyo que involucró mediciones con estación total, nivel automático y equipos GNSS. La calidad de las nubes de puntos 3D obtenidas fue evaluada internamente a partir de los parámetros estadísticos del procesamiento y en forma externa, lo anterior mediante las coordenadas de puntos de control obtenidas con métodos independientes.
Resultados:
La calidad geométrica interna de los puntos de las nubes generadas por el LiDAR terrestre estático Trimble TX5 fue estimada en 1 a 3 mm (1RMS). Las técnicas topográficas clásicas utilizadas en la poligonal de apoyo arrojaron una coherencia de 3 mm en cada una de las componentes, mientras que para la georreferenciación obtenida mediante mediciones GNSS fue de 1 cm.
Conclusiones:
La calidad geométrica interna de los puntos de las nubes generadas muestran la capacidad de representación de estos modelos 3D y su potencial para el análisis de deformaciones internas (como ángulos y distancias). Las diferentes nubes LiDAR 3D, inicialmente desvinculadas entre sí, pueden ser integradas a través de métodos geodésicos-topográficos y georreferenciadas en un marco de referencia geodésico de calidad adecuada.
Palabras clave:
Escáner laser terrestre, georreferenciación, nubes de puntos 3D, Idioma: Español..Abstract
Context:
LIDAR technique allows the 3D modeling of structures with an unprecedented resolution and millimetric precision. This technology is naturally related to Surveying, even more when models are linked to geodesic and vertical reference systems.Diverse LIDAR surveys should be geometrically linked with topographic classic techniques or with geodetic methods such as GNSS. Such linkage conditions the geometric external quality of the integrated model. In order to compare 3D models of millimetric quality through time, the accuracy of the geodetic determinations should be validated.
Method:
Two buildings that belong to the National University of La Plata were surveyed with TLS (terrestrial laser scanning). These scanners measure the visible surface. Therefore, the complete survey of any complex object requires a series of stations of registration. The final product results from the spatial vinculation of the different adjacent point clouds. In order to do that, there are different techniques.The one used in this case is that of common elements identified from neighboring stations. The results referred to a terrestrial geodetic frame were obtained through a polygonal based on measurements of total stations, automatic level and GNSS. The quality of the 3D final point clouds obtained was assessed internally considering the processing statistical parameters, and externally through the coordinates of control points obtained with independent methods.
Results:
The internal geometric quality of the point clouds generated with the TLS Trimble TX5, was estimated in 1 to 3 millimeters (1RMS). The classical topographic techniques used in the polygonal gave a coherence of 3 mm in each components, while for the georeferencing obtained with GNSS measurements was 1 cm.
Conclusions:
The internal geometric quality of the 3D models shows the capacity of representation of LIDAR and its potential for internal deformations’ analysis. The different 3D point clouds, initially dissociated,can be integrated through geodetic-topographic methods, and expressed in a suitable geodetic reference frame.
Keywords:
Terrestrial laser scanning, georeferencing, 3D point clouds, Language: Spanish.1. Introducción
La tecnología LiDAR (siglas del inglés Light Detection and Ranging) [1, vinculada a los sistemas GNSS (siglas del inglés Global Navigation Satellite System), posibilita la obtención de información georreferenciada 3D de precisión y alta resolución. El usuario genera grandes bancos de datos y las superficies son representadas a través de una densa nube de puntos laser [1], a cada uno de los cuales es posible asignar coordenadas espaciales.
En el presente trabajo se exploran los aspectos topográficos y geodésicos que deben considerarse en la etapa de medición y de procesamiento, ello con el fin de conseguir una nube de puntos 3D georreferenciada de calidad centimétrica (1 a 3 cm) y de alta resolución (cientos de puntos / m2).Se pretende mostrar, además, la capacidad de representación de estos modelos y su potencial para el análisis de deformaciones internas, por ejemplo, a través de la variación de ángulos y distancias.
La actividad incluyó la medición con un sensor LiDAR terrestre, marca Trimble, modelo TX5, de dos edificios de la UNLP (Universidad Nacional de La Plata, Buenos Aires, Argentina) no adyacentes y ubicados en una misma manzana: el edificio central de la Facultad de Ingeniería y el Colegio Nacional. Las mediciones LiDAR en ambos edificios fueron realizadas en forma independiente y los modelos de puntos 3D obtenidos se vincularon a posteriori a partir de mediciones geodésicas con equipos GNSS estación total y nivel.
2. Sistemas de referencia
Si bien la naturaleza de las determinaciones con LiDAR estático admite expresar los resultados en un sistema de referencia local, la necesidad de modelos 3D georreferenciados implica el empleo de un sistema global [1]. No obstante, el conjunto de técnicas involucradas para conseguir la georreferenciación impone la utilización de sistemas de referencia intermedios.
2.1. Sistema topocéntrico arbitrario
El escáner estático registra las siguientes mediciones (Figura 1):
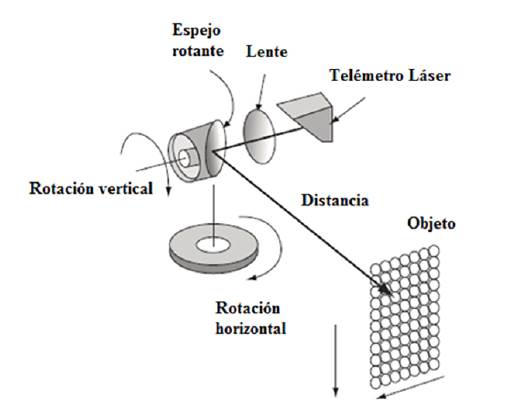
Figura 1: Distancia oblicua y los dos ángulos asociados en los planos horizontales y verticales que pasan a través del centro del instrumento.
-
Distancia oblicua por medio de un telémetro láser.
-
Ángulos asociados en los planos horizontales y verticales que pasan a través del centro del instrumento por medio de codificadores angulares [2].
De esta forma, se determinan las coordenadas polares de los puntos registrados en un sistema de referencia centrado en el instrumento (1), que luego, a través de la distancia, pueden expresarse en coordenadas cartesianas.

Donde d es la distancia oblicua desde el escáner hasta el objeto, α es el ángulo horizontal desde el origen de rotación y β es el ángulo cenital respecto de la vertical.
En consecuencia, para cada estación (posición del escáner) se dispone de un sistema topocéntrico arbitrario distinto. En la mayoría de los casos, para obtener una cobertura completa del objeto medido, la nube de puntos final surge de la unión de varios escaneos obtenidos desde distintas posiciones del sensor [2]; por ello, es necesario adoptar un sistema de referencia general.
2.2. Sistema de referencia general
Se puede adoptar como sistema general un sistema interno -uno de los sistemas topocéntricos definido por una de las posiciones del escáner (escaneo de referencia)- o un sistema externo, como los siguientes:
-
Sistema topocéntrico.
-
Global (generalmente el provisto por un marco de referencia oficial).
La definición de este sistema estará íntimamente relacionada con el objetivo del relevamiento. En este caso, se adopta un sistema global, ya que se pretende obtener modelos de puntos 3D georreferenciados. Por otro lado, cabe señalar que la operación de transformar las nubes de puntos generadas por diferentes posiciones del escáner a un sistema de referencia general, es comúnmente conocida como registro.
3. Registro de la nube de puntos
Existen diferentes alternativas para llevarlo a cabo, esto depende de la información geométrica disponible. Si en cada estación la posición del instrumento y algunas direcciones son conocidas, se realiza un registro directo en el que las coordenadas de todos los puntos son obtenidas en el mismo sistema de referencia.
El sensor utilizado no está diseñado para trabajar en esas condiciones, ya que su centro óptico no está identificado en el exterior del equipo y, por lo tanto, no puede relacionarse con marcas externas; por ello, se realizan transformaciones de similitud en 3D [2], [4] a través de un mínimo de tres puntos comunes entre las sucesivas estaciones. Se determinan así seis parámetros [1], [2]: tres de traslación y tres de rotación mediante el método de mínimos cuadrados. El factor de escala es omitido, pues se trata del mismo instrumento trabajando en las mismas condiciones y en forma consecutiva.
Estos puntos comunes se consiguen a partir de colocar en el campo visual del escáner objetos de referencia [1], los más comunes son las esferas, donde los puntos son materializados a partir de su centro; este se encuentra muy bien determinado al ajustar el modelo esférico a la superficie escaneada. El conocimiento previo del radio facilita al software su detección.
Otros algoritmos de registración como ICP (siglas del inglés Iterative Closest Point) [4] son utilizados cuando no se dispone de elementos predefinidos; en este caso, se utilizan los puntos de objetos bien definidos en las zonas de solapamiento. Los puntos homólogos son ajustados entre sí, minimizando por mínimos cuadrados las diferencias entre sus coordenadas hasta alcanzar un umbral deseado.
Finalmente, en el método feature-based registration [4], en lugar de puntos se exploran patrones geométricos comunes a los dos escaneos como planos, esferas y cilindros; una de las ventajas es que, a diferencia de los enfoques basados en ICP, se necesita poco o ningún solapamiento entre las nubes de puntos, el único requisito es que porciones de los features aparezcan en dos (o más) nubes de puntos [1].
4. Trabajo de campo
4.1. Tareas de apoyo al LiDAR
El producto que se propone obtener es una nube de puntos con coordenadas planimétricas en el Marco de Referencia Geodésico Nacional POSGAR (Posiciones Geodésicas Argentinas) 07 y coordenadas altimétricas referidas al 0 del IGN (Instituto Geográfico Nacional). Dadas las características de la zona de trabajo, con vegetación alta y edificios, se diseñó y materializó una poligonal planialtimétrica de apoyo medida con estación total y nivel. Con el objeto de conseguir coordenadas POSGAR 07, se realizaron mediciones con equipos GNSS geodésicos sobre tres puntos de esta poligonal.
4.1.1. Poligonal de apoyo
Una poligonal de apoyo (Figura 2), basada en mediciones tradicionales, fue construida con el objetivo de vincular en forma precisa los modelos de puntos 3D de ambos edificios. Dicha poligonal es georreferenciada con GNSS. En consecuencia, a partir de esta es posible asignar coordenadas geodésicas a puntos de interés.
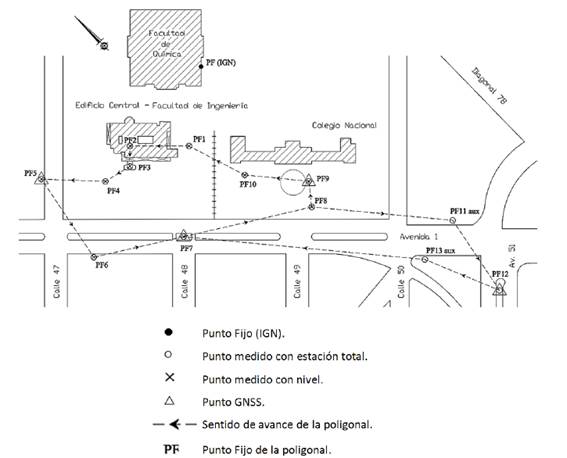
Figura 2: Poligonal de apoyo al Relevamiento LiDAR
Para resolver la parte planimétrica, se utilizó una estación total Trimble M3 5” [ Precisión en distancia: ? 3 + 2ppm * D) mm; incremento mínimo de visualización angular: 5”/1,5 mgon ], un miniprisma y una placa reflectante. Se estableció un sistema de referencia local y se utilizó el método de ángulos y distancia (siete mediciones); estas completaron un circuito con un cierre final de 3 mm en norte y 3 mm en este. A modo de control, se fueron cerrando figuras bisectando puntos atrás, con máximos de 2 mm.
Para la componente altimétrica se realizó nivelación geométrica con un nivel automático PENTAX 28X (precisión (nivelación doble): _1.5 mm). Se partió del punto fijo ubicado en la cara sudeste del edificio de la Facultad de Química (Figura 3) de cota +19,591 m referida al 0 del IGN.
Figura 3: Punto fijo ubicado en la cara sudeste del edificio de Química.
Para la componente altimétrica se realizo nivelación geométrica con un nivel automático PENTAX 28X (precisión (nivelación doble): ?1.5 mm). Se partió del punto fijo ubicado en la cara sudeste del edificio de la Facultad de Química (Figura 3) de cota +19,591 m referida al 0 del IGN.
Nota: se trata de un punto de Nivelación de la Provincia de Buenos Aires. Esta nivelación se encuentra referida al 0 del IGN.
Se asignó cota a la marca PF1 (20,115 m) y se completó un circuito con cierre 0 mm; partiendo del PF1, se determinaron las cotas del resto de los puntos de la poligonal con un cierre de 3 mm El criterio de compensación adoptado se basa en considerar que el error cometido es proporcional a la distancia recorrida [5].
La georreferenciación de la poligonal se obtuvo a partir de mediciones GNSS geodésicas realizadas sobre tres de sus puntos (Figura 4), utilizando receptores doble frecuencia y la estación permanente LPGS de la red RAMSAC (Red Argentina de Monitoreo Satelitario Continuo), cuyo RMS (siglas del inglés ıRoot Mean Square), a priori, es de 0,5 cm [6]. Se observaron dos sesiones de pocas horas con una línea de base máxima de 1,3 Km.
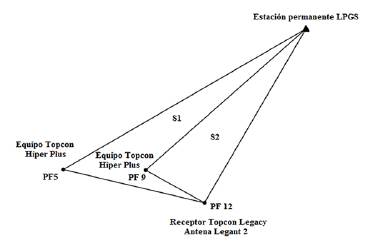
Figura 4: Croquis correspondiente las mediciones GNSS.
El procesamiento de las dos sesiones independientes arrojó una discrepancia de 0,7 cm en cada una de las componentes; en estas condiciones se obtuvieron las coordenadas geodésicas POSGAR 07 de toda la red con un RMS del orden de 1 cm. La poligonal fue trasladada y rotada, pero su escala no fue modificada.
Como la zona de trabajo se encuentra a 1º del meridiano central de la correspondiente faja oficial Nº 6, proyección cartográfica Gauss-Krüger (λ = -57º) y el módulo de deformación lineal para la distancia más larga involucrada (PF5-PF12) es m=1,00009, es decir, un error de 3,5 cm en 388 m, se decidió crear una faja Gauss-Krüger propia centrada en la zona de mediciones y denominada faja Nº 9 para evitar errores de deformación.
4.2. Relevamiento LiDAR
4.2.1. Instrumento
El relevamiento se realizó con un escáner láser 3D marca Trimble modelo TX5 (Figura 5).

Figura 5: Fotografía del TLS Trimble TX5 durante el relevamiento del patio interior
Para realizar la registración con objetos de referencia, se dispuso de un set que incluyó seis esferas y cinco tableros cuadriculados. Para referenciar las esferas a través de mediciones con estación total, se utilizó un miniprisma que tiene la particularidad de poseer la misma base de las esferas y el tamaño del radio de estas; de esta manera, al bisectar el miniprisma se consiguen las coordenadas del centro de la esfera (Figura 6).
Figura 6: (a) esferas y tablero cuadriculado. (b) Esfera. (c) Miniprisma.
El escáner láser 3D Trimble TX5 envía cientos de miles de haces láser infrarrojo (λ=905 nm)por segundo hacia el centro de un espejo giratorio; este desvía el láser en rotación vertical con una resolución angular de 0,009_ (Figura 7). De acuerdo con el estándar IEC 60825-1:2007, Ed. 2.0, el escáner está clasificado como un sistema láser clase 3R.
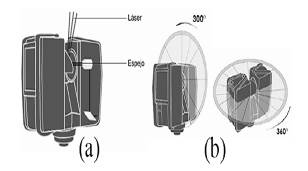
Figura 7: (a) Figura que muestra como el espejo desvía el haz láser en rotación vertical. (b) Campo de visión que cubre el escáner.
Las distancias son determinadas a partir de la medición de diferencias de fase y la frecuencia de disparo es de 976 KHz. El error máximo en la distancia medida por el escáner desde su punto de origen a un punto de un objetivo planar es de ?1 mm en 25 m para 90% de reflectividad y ?2 mm en 25 m para 10% de reflectividad. Cubre un campo de 360_ en acimut y 300_ en el plano vertical (Figura 7).
El alcance máximo es de 120 m, aunque depende en gran medida de la reflectancia de la superficie incidida. Los datos se almacenan en una tarjeta SD y posee una cámara color integrada de 70 megapíxeles. Los escaneos tienen la opción de contar con datos posicionales derivados de los diferentes sensores que posee el escáner, estos datos pueden ser: altitud del sensor de altura, orientación de la brújula e inclinación del compensador de doble eje. Esta información, si está disponible, se utiliza para una alineación (registro) aproximada inicial y automática de los escaneos después de su importación.
4.2.2. Estaciones LiDAR
Como se mencionó líneas atrás, debido a las características del equipo no es posible realizar la medición desde puntos de coordenadas conocidas. En general, la cantidad y la ubicación de las estaciones necesarias surgen de un análisis del objetivo del relevamiento, el tipo de producto, el tamaño del objeto a relevar, las obstrucciones que otros elementos próximos puedan generar y el ángulo máximo de reflexión en función de la precisión deseada [1]. Cuanto más se aleje del ángulo de 90_ (incidencia perpendicular sobre la superficie) peor será la determinación del punto medido[7].
En la Figura 8 se muestra el croquis con la ubicación de las estaciones (E1, E2, ... E9) elegidas para el relevamiento de la fachada y parte del interior del edificio central de la Facultad de Ingeniería.
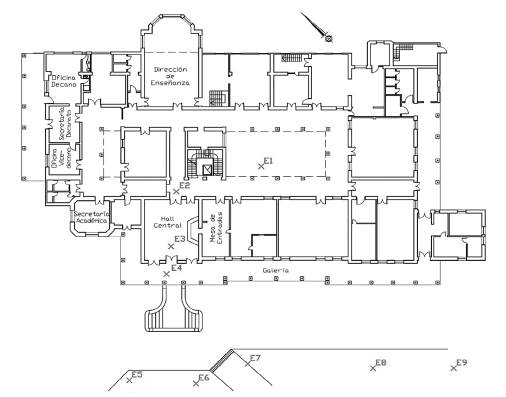
Figura 8: Distribución de las estaciones realizadas en el relevamiento LiDAR del edificio central de la Facultad de Ingeniería.
La técnica de registro, basada en objetos de referencia artificiales y la referenciación correspondiente, se programó mediante mediciones de los objetivos con estación total a partir de la poligonal planialtimétrica confeccionada, ya que el entorno no permitió realizar mediciones GNSS.
4.2.3. Parámetros por configurar en cada escaneo
Los principales parámetros configurados antes de cada escaneo se mencionan a continuación.
-
Resolución o densidad [1]. Hace referencia a la cantidad de planos verticales que se registran,por lo tanto, este parámetro determina la cantidad de puntos de escaneo resultante. Los posibles valores por seleccionar son: 1/1, 1/2, 1/4, 1/8, 1/10, 1/16, 1/20, 1/32. Si se selecciona una resolución de 1/2 significa que, de cada dos planos verticales, el escáner registrará solo uno.
-
Calidad. Indica cuántas veces mide el escáner cada plano vertical. Se puede seleccionar una calidad de hasta 8X, es decir, ocho pasadas por plano. A mayor calidad, menor ruido de los datos de escaneo, pero mayor tiempo de trabajo.
-
Rango de escaneo horizontal y vertical. Es posible limitar el área vertical y horizontal de escaneo.
-
Sensores brújula electrónica, clinómetro y altímetro. Se puede habilitar el uso de los sensores incorporados en el escáner para que los datos recolectados por estos sean utilizados en el proceso posterior de registro de escaneo.
-
Filtros. El contorno nítido elimina los puntos de escaneo que se originan al tocar dos objetos con un mismo impacto de láser, lo cual ocurre principalmente en los bordes de los objetos. El cielo nítido elimina los puntos de escaneo que se originan al no tocar ningún objeto, esto sucede principalmente cuando se escanea el cielo.
-
Escaneo con color. Con esta opción habilitada, los escaneos contendrán imágenes digitales que el sensor capturará durante la toma de datos.
En este trabajo los sensores y los filtros fueron habilitados, lo mismo que la opción de color. Para conseguir una densidad de puntos relativamente homogénea el parámetro de resolución varió en 1/2 - 1/4 en el interior y exterior respectivamente. La calidad de “3X” se consideró suficiente para la detección de eventuales anomalías, como el paso ocasional de una persona.
4.2.4. Objetos de referencia
Los softwares de procesamiento de datos LiDAR soportan dos tipos de objetos de referencia para el registro: naturales (planos, losas, conductos, puntos de esquina, entre otros) y artificiales (colocados en forma manual, como esferas o tableros cuadriculados [1]). Se comprobó que la utilización de estos últimos arroja resultados más precisos en menos tiempo de procesamiento.
Para definir la ubicación de los objetivos artificiales, con especial énfasis sobre las esferas y los tableros cuadriculados, se deben respetar una serie de principios: (a) ubicarlos a distintas distancias con respecto al escáner, respetando la máxima establecida para que el software pueda reconocer el objeto; (b) distribuirlos en diferentes niveles en el área de escaneo; (c) evitar la disposición lineal; (d) para los tableros cuadriculados el ángulo con el cual incide el haz láser no debe ser menor a 45_y no deben acoplarse a superficies curvas; (e) elegir lugares que garanticen la inamovilidad de los objetivos a lo largo de todo el tiempo que demore realizar los escaneos que los involucren.
Hasta aquí, se mencionaron elementos a considerar al momento de determinar la ubicación de los objetos de referencia cuando se los utiliza solo con el propósito de conseguir la integración de todos los escaneos, adoptando como sistema de referencia uno de los sistemas internos de uno de los escaneos;sin embargo, los objetivos, a su vez, sirven para referenciar los datos en un sistema externo, el cual puede ser un sistema local o un sistema global. Es necesario determinar las coordenadas de los objetivos en el marco de referencia que se desee, a partir de mediciones GNSS o técnicas clásicas topográficas (7); en el caso de las esferas, se determinan las coordenadas del punto central, para los tableros cuadriculados se determinan las coordenadas del punto central de los cuatro cuadrantes.
De esta manera, la referenciación en un sistema externo se convierte en otro condicionante a la hora de ubicar los objetos de referencia. Si la misma se pretende lograr mediante mediciones GNSS,entonces los objetivos deberán posicionarse en lugares que tengan las condiciones necesarias para poder realizarlas (libres de obstrucciones). En el caso de las esferas, si se realizan mediciones con estación total, estas deberán ubicarse en sitios donde luego se pueda colocar de manera exacta el miniprisma (lugares planos) que permite determinar las coordenadas del punto central (Figura 9).

Figura 9: (a) Esfera con ubicación apropiada para referenciar mediante mediciones con estación total. (b) Esfera que no posee una ubicación apta para colocar el miniprisma
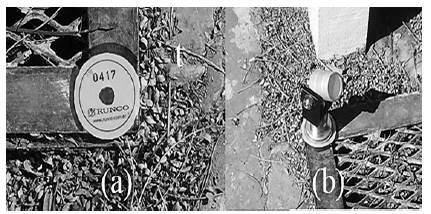
Figura 10: (a) Calcomanía utilizada en las mediciones, señala la posición de una esfera. (b) Miniprisma ubicado sobre la calcomanía para conseguir las coordenadas del punto central de la esfera que ocupo ese lugar.
En los relevamientos realizados se utilizaron los dos tipos de referencias artificiales disponibles:esferas y tableros cuadriculados. La distribución procuró: (a) asegurar que entre escaneos consecutivos existan como mínimo tres objetos de referencia en común; (b) garantizar que algunos de ellos tengan posiciones adecuadas para ser medidos con estación total; (c) respetar, en la medida de lo posible, los principios enunciados anteriormente.
En la Figura 11 y la Figura 12 se exponen croquis que muestran la distribución de los objetos de referencia artificiales y, a su vez, se distinguen los objetos que fueron georreferenciados.
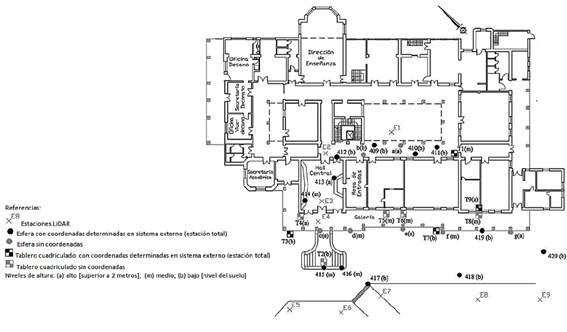
Figura 11: Distribución de los objetos de referencia artificiales utilizados en el edificio central.
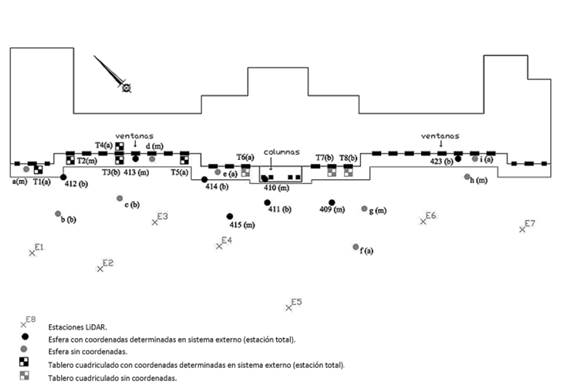
Figura 12: Distribución de los objetos de referencia artificiales utilizados en el Colegio Nacional.
Debido a que la zona en que se desarrolla el trabajo se encuentra cubierta con vegetación alta, la referenciación se consiguió mediante mediciones con estación total; para ello, se estacionó sobre los puntos de la poligonal ubicados frente a los edificios (PF4, PF9 y PF10) y desde allí se bisectaron los objetivos posicionados con la finalidad de lograr la georreferenciación. Para tener un control y que la determinación de coordenadas de las referencias no sea una radiación, se realizó estación libre y nuevamente se determinaron las coordenadas de los mismos objetivos. De este control, resultó discrepancia milimétrica, con la excepción de algunos de los tableros cuadriculados colocados en el edificio central, esto se debe a que se fijaron a la pared mediante cinta de papel (para no arruinar la pintura) y con el correr del tiempo se comenzaron a despegar y a desplazar.
La referenciación de los tableros cuadriculares se logró simplemente bisectando el punto de intersección de los cuatro cuadrantes; en cuanto a las esferas, se utilizó el miniprisma. Para asegurar que el prisma se ubique exactamente en la posición que ocupó la esfera, se colocaron previamente calcomanías que poseen la forma de la base de ambos elementos (Figura 10).
5. Procesamiento de datos LiDAR
5.1. Software
Para procesar los datos LiDAR se utilizó el software propietario SCENE. El escáner láser Trimble TX5 almacena los registros en una tarjeta SD extraíble y para cada escaneo genera varios archivos,los cuales, en el proceso de importación, son combinados por el software SCENE en un archivo *fls. La información almacenada incluye las coordenadas de cada punto en un sistema de referencia local que tiene como origen la posición del escáner, los valores de intensidad, las imágenes capturadas con la cámara fotográfica del escáner, datos correspondientes a los sensores complementarios y sobre la configuración utilizada en el escaneo.
En la Figura 13 se muestran capturas de pantalla una vez cargados todos los datos, estos reflejan que, si bien poseen una alineación aproximada, se debe realizar el registro para lograr una nube de puntos integrada.
Figura 13: Dos escaneos en el edificio central. Se aprecia la alineación aproximada.
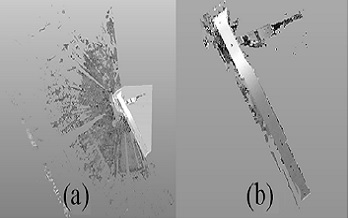
Tanto en los escaneos del edificio central como en los del Colegio Nacional se distinguen zonas sin información (Figura 14).
Figura 14: Nube de puntos en la cual se identifican zonas sin información.
Estas zonas son producto de lo que se conoce como sombras LiDAR [1]. En la Figura 15 se muestra dicho fenómeno.
Figura 15: Zonas de sombra en la captura del escáner láser.
Como se observa, la sombra LiDAR se produce cuando una superficie se interpone entre el rayo láser y el blanco a relevar, es decir, donde el sensor no ha llegado a medir puntos; por eso, es importante realizar un reconocimiento previo de la zona de trabajo para determinar y definir las características de las mediciones en función del nivel de detalle y precisión deseada. Un relevamiento completo con gran nivel de detalle de toda la fachada de los edificios implicaría el empleo de estructuras en forma de andamio, las cuales garanticen una cobertura completa.
Antes de comenzar con el proceso de registro en el cual es necesario identificar los objetos de referencia, se realizó una limpieza en forma manual sobre cada uno de los escaneos, eliminando mediante la herramienta de selección de polígonos, información sobre la zona aledaña de los edificios.De esta manera, se facilita el posterior proceso de registro, conservando solo los datos que son de interés (Figura 16).

Figura 16: Nube de puntos resultante de la estación E4. (a) Vista en planta de la nube de puntos con el polígono que limita la información que interesa conservar. (b) Vista en planta de la nube de puntos luego de eliminar los puntos que se encuentran afuera del polígono.
5.2. Registro
5.2.1. Sistema general adoptado: sistema interno (sistema de referencia topocéntrico arbitrario)
En principio se realizó el registro adoptando como referencia el sistema interno de uno de los escaneos, el cual en adelante es considerado sistema de referencia topocéntrico arbitrario. Para el relevamiento del edificio central se adoptó como escaneo de referencia el correspondiente a la estación E6, mientras que para el Colegio Nacional se adoptó el de la estación E3. En este caso, la elección de estos fue determinada automáticamente por el software, pero puede realizarse en forma manual. Este registro permite determinar la calidad y consistencia geométrica de la nube de puntos LiDAR.
El proceso implica la identificación de los objetos de referencia en cada par de escaneos sucesivos.Para identificar los objetivos en forma manual, el software ofrece una vista de correspondencia dividida (Figura 17). En esta vista, la pantalla se divide en dos ventanas con el objetivo de cargar en la izquierda un escaneo y en la derecha el escaneo consecutivo; de esta manera, se van reconociendo los objetos de referencia correspondientes.
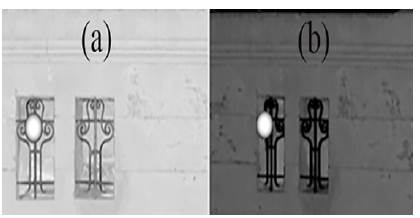
Figura 17: Vista de correspondencia dividida.
Una vez identificados los objetos de referencia comunes, se calculan los parámetros de registración (rotación y traslación) que vinculan ambos escaneos. La aplicación de la matriz correspondiente permite obtener una nube de puntos integrada.
Figura 17. Vista de correspondencia dividida.
5.2.2. Sistema general adoptado: sistema externo (POSGAR07; IGN)
En segunda instancia, se llevó a cabo el registro estableciendo como sistema de referencia general al marco de referencia POSGAR 07. Para la planimetría se utilizó proyección Gauss-Kr¨uger y la altimetría se expresó en el marco de referencia vertical definido por la red altimétrica del IGN que es el Sistema de Referencia Vertical Nacional 2016 (SRVN16). El relevamiento LiDAR realizado con el TX5 corresponde muy aproximadamente a un sistema topocéntrico orientado según el horizonte astronómico; luego, las alturas resultantes de una secuencia amplia de mediciones realizadas desde sucesivas estaciones estarán afectadas por el campo de la gravedad terrestre. Resulta importante tener en cuenta que el alcance del sensor es del orden de 100 m; por eso, para los controles altimétricos se trabajó con alturas referidas al marco de referencia vertical del IGN, asignadas a los diferentes puntos a partir de nivelación geométrica.
Por el contrario, cuando se trabaja sobre plataformas móviles terrestres o aéreas, el posicionamiento es definido en todos los casos con GNSS; así, la geometría 3D queda definida a partir del marco de referencia geodésico asociado a GNSS, por ejemplo, POSGAR07. Como consecuencia de ello, las coordenadas de cada punto serán la latitud, la longitud y la altura geodésica. Si el último componente desea ser expresado como una altura física referida al geoide, será necesario aplicar un modelo de geoide.
Con este registro se pasa de un sistema de referencia topocéntrico arbitrario a un sistema de referencia geocéntrico (POSGAR07), considerando que la desviación de la vertical es suficientemente pequeña en la zona.
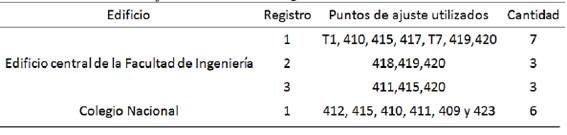
Para la nube de puntos correspondiente al edificio central, se realizaron tres registros con sistema externo, variando la cantidad de puntos de ajuste y su distribución; de esta manera, se generan condiciones similares a las que es posible encontrar en la realidad. En la Tabla I se exponen los puntos de ajustes utilizados. Un conjunto de objetos de referencia fue reservado para ser utilizado como control.
Tabla I: Puntos de ajuste utilizado en el registro. Marco de referencia POSGAR07
5.3. Escaneos con color
Además de la información geométrica, un escaneo contiene información de intensidad de reflectancia e información de color de los puntos de escaneo individuales [7]. En el caso del escáner láser Trimble TX5, una cámara integrada permite registrar imágenes digitales durante la medición;luego, cada punto del escaneo cuenta con información de color. Si por algún motivo durante el escaneo el escáner no pudo tomar las fotos o es de noche, es posible agregar información de color mediante la toma posterior de imágenes digitales del entorno escaneado [7].
5.4. Producto
El producto obtenido como resultado de este trabajo incluye dos nubes de puntos 3D georreferenciadas y texturizadas de alta resolución (densidad mínima 10000 puntos/m2) y calidad geométrica.Una corresponde a la fachada de rumbo sudoeste del edificio central de la Facultad de Ingeniería y parte de su interior; la otra, a la fachada de rumbo sudoeste del Colegio Nacional (Figura 18, Figura 19 y Figura 20).
Figura 18: Nube de puntos 3D georreferenciada y texturizada de la fachada de rumbo sudoeste del edificio central de la Facultad de Ingeniería.
Figura 19: Nube de puntos 3D georreferenciada y texturizada de la fachada de rumbo sudoeste y parte del interior del edificio central de la Facultad de Ingeniería. Vista planta.
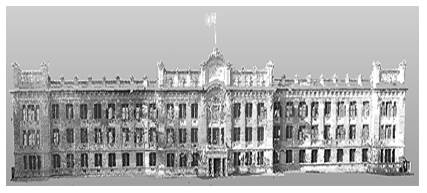
Figura 20: Nube de puntos 3D georreferenciada y texturizada de la fachada de rumbo sudoeste del Colegio Nacional.
Dichas nubes de puntos se disponen en diversos formatos: E57, VRML, DXF, XYZ de texto,XYZ binario, IGES, PTS, PTX y POD (Pointtools).
6. Evaluación de las nubes de punto 3D
Para evaluar las nubes de puntos se realizaron dos tipos de análisis:
-
Evaluación interna. Finalizado el registro, el software muestra diferentes parámetros estadísticos que indican la calidad con que se empataron los escaneos; no obstante, es necesario tener en claro que dichos parámetros muestran la desviación de un objeto comparado con los objetos de los escaneos circundantes. No hay, en cambio, una estimación de cómo se trasmite ese indicador en el conjunto. En relevamientos lineales, donde se construye una cadena de escaneos, la imprecisión total puede ser mucho mayor que la indicada por los parámetros estadísticos del software.
-
Evaluación externa. Conjunto de puntos de control externos de coordenadas obtenidas con métodos independientes que permiten evaluar la exactitud (accuracy) de los modelos de puntos 3D obtenidos.
6.1. Registro con sistema de referencia general interno (sistema de referencia
Con el registro de escaneos realizado, el software expone una tabla en la que se pueden ver los pares de referencia que se utilizaron para empatar los escaneos, los cuales se encuentran ordenados por su tensión. El valor tensión describe la discrepancia en distancia en el sistema de referencia adoptado (general), entre la posición de dos objetos de referencia correspondientes a escaneos consecutivos y superpuestos. A partir de estos valores, es posible identificar los pares de referencia que están causando problemas en el registro; luego, si entre escaneos consecutivos existen más de tres objetos de referencia, se pueden eliminar los que están generando inconvenientes y mejorar el resultado del registro.
Para el caso del relevamiento del edificio central, se eliminaron los tableros cuadriculados T4 y T6 de todos los escaneos y la esfera e de los escaneos correspondientes a las estaciones E6 y E9. Los altos valores de tensión correspondientes a los objetos mencionados se atribuyen, para los tableros,a una ligera modificación en su posición durante el levantamiento por una mala fijación; en el caso de la esfera, esta fue eliminada de los escaneos correspondientes a las estaciones más lejanas, por lo tanto, su valor de tensión alto se debe a una peor definición del punto central ocasionada por tener escasa cantidad de puntos de escaneo sobre su superficie [8].
Para el Colegio Nacional se eliminaron los tableros cuadriculados T1 y T2 de las estaciones E1 y E2; T3 y T4 de las estaciones E2 y E3; y la esfera a de la estación E1 y E2; por otra parte, se generó un plano como objeto de referencia natural llamado P1 mediante una de las paredes de la fachada para mejorar el empate entre los escaneos tomamos desde E1 y E2. En este caso, los altos valores de tensión para los tableros se pueden atribuir a que, en uno de los dos escaneos consecutivos, el haz incidió con un ángulo muy oblicuo, lo que ocasiona una definición deficiente del punto central [8];respecto a la esfera no se pudieron encontrar motivos que expliquen el valor de tensión arrojado.
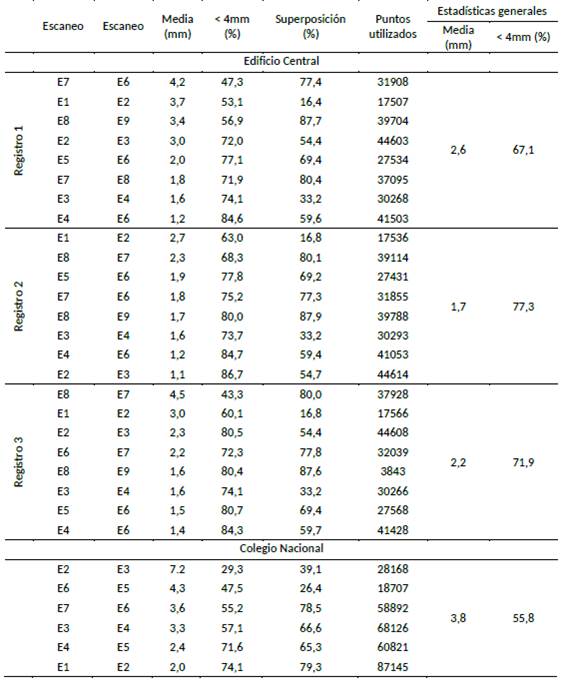
Por otro lado, el software calcula los siguientes parámetros estadísticos (Tabla II): (a) media,describe la discrepancia entre dos escaneos correspondientes; (b) número de puntos con una falla menor a 4 mm, mostrado en porcentaje; (c) superposición, muestra la cantidad de puntos, que se superponen en los dos escaneos, expresado en porcentajes; (d) puntos utilizados, número de puntos de escaneo que se utilizaron para el cálculo estadístico; (e) estadísticas generales.
Tabla II: Parámetros estadísticos de los registros de las nubes de puntos 3D. Sistema de referencia topocéntrico.
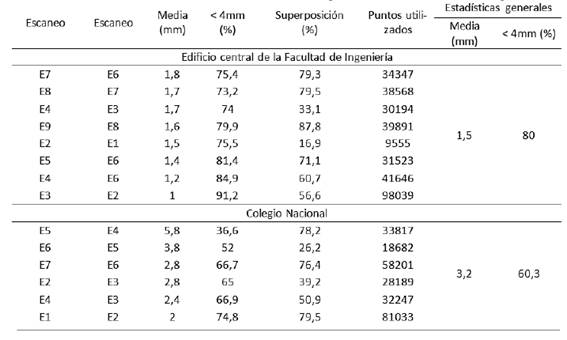
Como se observa, la discrepancia entre empates de escaneos del relevamiento del Colegio Nacional resultó el doble frente a la que arrojó el relevamiento del edificio central. Se trata de un resultado esperable, donde las hipótesis que justifican dicho comportamiento son las siguientes:
-
En ambos relevamientos se trabajó con la misma resolución. Sin embargo, las estaciones LiDAR, en el caso del Colegio Nacional, se ubicaron más apartadas del edificio debido a que la altura así lo demandaba; de otra forma, se hubiese perdido mucha información. Esto da como resultado que la cantidad de puntos sobre la superficie de los objetos de referencia artificiales sea menor; luego, el software reconoce el objeto y estima las coordenadas de su punto central de manera menos eficiente.
-
El haz puede representarse como un cono de energía, a mayor distancia aumenta el tamaño de la huella del haz láser sobre el objeto incidido; en consecuencia, el punto registrado corresponde a la integración de un sector de la superficie reflejada cuya sección deja de ser circular.
Por otra parte, se seleccionaron distintos pares de objetos de referencia a los cuales se les habían determinado las coordenadas y se calcularon valores de la distancia euclidiana en 3D; luego, se contrastaron las distancias calculadas a partir de coordenadas obtenidas mediante mediciones de estación total con las distancias medidas en la nube de puntos registradas (Tabla III).
Tabla III: Evaluación externa de las nubes de puntos 3D. Sistema de referencia topocéntrico.
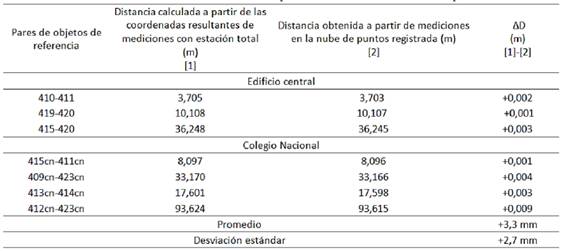
La comparación de distancias muestra una suerte de tendencia en los signos, esto podría atribuirse a un problema de escala entre los diferentes instrumentos. Como ya fue mencionado, los parámetros estadísticos que determina el software no tienen en cuenta cómo se transmite la imprecisión de un escaneo a otro; luego, para tener un orden de magnitud de la transmisión de la precisión se compararon distancias determinadas de forma indirecta con estación total y determinadas a partir de mediciones en la nube de puntos LiDAR, las cuales atraviesan de punta a punta los edificios e involucran la mayor cantidad posible de estaciones. Para el edificio central, se determinó la distancia entre las esferas 415 y 420, la misma involucra seis de las nueve estaciones LiDAR. La discrepancia hallada fue de 3 mm, que resulta coherente con la estadística global calculada por el software(RMS=1,5 mm), ya que se ubica en 2*RMS.
Para el Colegio Nacional se determinó la distancia entre las esferas 412 y 423, la misma involucra siete de las siete estaciones LiDAR. La discrepancia hallada fue de 9 mm, también coherente con la estadística global del software (1RMS=3,2 mm), aunque en los límites de la correspondiente campana de Gauss (<3*RMS). Debe considerarse que las distancias analizadas son muy superiores a las incluidas en cada uno de los escaneos.
Por otro lado, se determinó el promedio y la desviación estándar de todas los ΔD resultantes, sin discriminar entre el edificio central y el Colegio Nacional, ya que los relevamientos se llevaron a cabo el mismo día, con el mismo instrumental y en las mismas condiciones ambientales. Vale aclarar que los ΔD resultantes no son íntegramente atribuibles a impresiones resultantes de los empates entre escaneos LiDAR, los errores en las determinaciones con estación total también influyen en los valores de discrepancias hallados.
Finalmente, los errores de cierre de la poligonal fueron de 3 mm en cada uno de sus componentes;en consecuencia, las diferencias se ubican en el límite de la capacidad de la técnica utilizada para el control.
6.2. Registro con sistema de referencia general externo
Realizado este registro, se tiene una de nube de puntos con coordenadas: norte-este POSGAR 07-GK, faja N? 9 y cota H referida al 0 del IGN, SRVN16. En la Tabla IV se muestran los parámetros estadísticos calculados por el software de procesamiento.
El análisis de la Tabla IV es equivalente al que se realizó para el registro con sistema interno(Tabla II). El incremento de la media que se observa, tanto para el relevamiento del edificio central como para el del Colegio Nacional, se atribuye a que en este registro se agrega información de georreferenciación adicional que suma un fuerte condicionamiento con nuevos errores.
Tabla IV: Parámetros estadísticos de los registros de las nubes de puntos 3D. Marco de referencia POSGAR 07.
Para el control se seleccionaron aquellos objetos de referencia artificiales de coordenadas conocidas pero que no fueron utilizados como puntos de ajuste. Se decidió excluir a los tableros como puntos de control, ya que sufrieron cambios de posición durante el relevamiento y solo se consideraron puntos generados por esferas. En la Tabla V se puede observar la comparación entre las coordenadas de los objetos determinadas mediante mediciones con estación total y las obtenidas a partir de la nube de puntos LiDAR, una vez registrada. En la Tabla VI se exponen los valores estadísticos (promedio y desviación estándar) sobre los ΔN, ΔE, ΔH de los registros 1, 2 y 3 del edificio central.
Tabla V: Evaluación externa de las nubes de puntos 3D. Marco de referencia POSGAR 07.
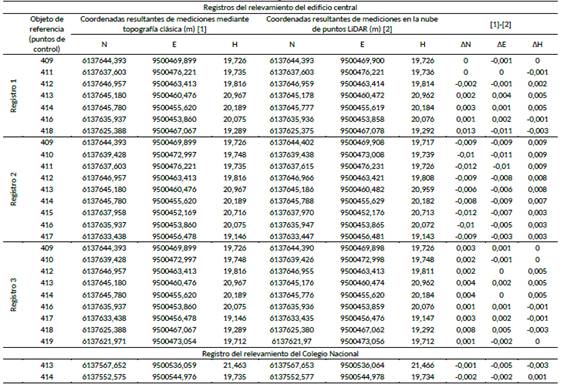
Tabla VI: Estadística de las diferencias en el edificio central

Un elemento común a los tres registros es el comportamiento de la componente vertical, el cual muestra una coherencia superior frente a las componentes horizontales; este resultado puede estar relacionado con dos factores originados en la medición LiDAR y en la metodología utilizada para determinar las alturas de los puntos de control:
-
Los puntos de control se encuentran en un rango vertical de visión muy estrecho (?10?), por lo que la huella del haz láser no experimentará deformaciones sensibles y se parecerá mucho a un círculo; en consecuencia, la componente vertical determinada con LiDAR estará muy bien definida.
-
Las alturas de los mismos puntos fueron determinadas con nivelación geométrica y cortas radiaciones con estación total. El cierre de la nivelación fue de 3 mm.
En consecuencia, ambos elementos convergen hacia una correspondencia poco viciada por los errores inherentes a las técnicas utilizadas.
El primer registro se realizó con un número de objetos de referencia que supera en cuatro al mínimo necesario y con una distribución homogénea sobre todo el relevamiento, esto provoca un muy buen condicionamiento geométrico del sistema.
En el segundo registro los puntos de ajuste fueron intencionalmente agrupados en uno de los extremos del relevamiento. En los promedios se visualiza una clara tendencia, la cual no debe ser interpretada necesariamente como una traslación, ya que es probable que incluya influencia de las rotaciones mal definidas. Los tres puntos agrupados se comportan geométricamente para el conjunto como uno solo; en consecuencia, la estructura es libre para rotar en el espacio manteniendo la calidad geométrica interna.
Los parámetros estadísticos y la distribución de los desvíos posicionan al tercer registro como el mejor; este fue ajustado con tres puntos con coordenadas conocidas de mucha calidad, bien definidos en la nube LiDAR (puntos generados por esferas) y distribuidos.
Como en el primer registro, se utilizaron para el ajuste tableros cuadriculados (T1 y T7), es coherente que el tercer registro presente una mejor estadística; no obstante, es válido aclarar que el tablero T1 fue el único al que se lo aferró a una superficie metálica y que, a su vez, tenía una incidencia perpendicular del haz láser, por lo tanto, se trata a priori de un buen punto LiDAR. Luego,la estadística del primer registro es muy buena, solo uno de los siete puntos de ajuste utilizados (T7) tiene una representación láser deficiente; esta situación, nuevamente, se pone en evidencia en las diferencias obtenidas para la esfera 418. Mientras que en todas las esferas las diferencias resultan de milímetros, para la esfera 418 son de un centímetro en las componentes horizontales; esto podría atribuirse a que la zona en la que se encuentra dicha esfera está condicionada por el punto T7 (tablero cuadriculado).
7. Conclusiones
La calidad geométrica interna de los puntos de una nube generada por un LiDAR terrestre estático,como el Trimble TX5, fue estimada en 1 a 3 mm (1RMS); dichas precisiones muestran la capacidad de representación de estos modelos de puntos 3D y su potencial para el análisis de deformaciones internas (como ángulos y distancias).
Los modelos de puntos 3D obtenidos en este trabajo establecen una referencia geométrica confiable para futuras tareas en ambos edificios, representando, en general, una línea de base multipropósito. Será posible integrar nuevas zonas relevadas, al igual que otro tipo de información georreferenciada.
Las nubes de puntos LiDAR 3D correspondientes a los dos edificios, e inicialmente desvinculadas entre sí pueden ser integradas a partir de un mismo sistema externo local o global. La calidad de dicha integración estará naturalmente condicionada por la precisión de los métodos geodésicostopográficos utilizados; en este caso, se obtuvo una coherencia de 3 mm en cada una de las componentes a partir de la creación de una red topográfica (sistema externo local), mientras que en la georreferenciación en el sistema externo global mediante mediciones GNSS (POSGAR07), alcanzó a 1 cm. Por lo cual, la repetitividad externa podría ser controlada en ese nivel de precisión.
El establecimiento de marcas de referencia estables facilita el registro y el control de las mediciones LiDAR; además, permite la integración de futuras mediciones en el mismo marco de referencia.
Como en toda transformación de Helmert, la forma de expresar el modelo 3D basado en LiDAR en un marco de referencia externo como POSGAR07 es a partir de un conjunto de puntos de coordenadas conocidas bien distribuidos. En el presente trabajo, la influencia de aspectos particulares de la medición con TLS condiciona, además, el tipo de marcas utilizadas y su ubicación relativa durante la medición; por eso, es importante contar con marcas de referencia redundantes para el análisis de deformaciones en determinados sectores del relevamiento.
Como elementos de referencia, las esferas presentan muchas ventajas frente a los tableros cuadriculados debido a la fuerte geometría de estas; por otra parte, los tableros cuadriculados solo son aptos para relevamientos en los que, desde estaciones consecutivas, los haces tengan una incidencia prácticamente perpendicular.
La técnica de registración determina la dificultad de la campaña LiDAR. Cuando se adopta la basada en objetos de referencia artificiales, necesariamente se debe contar con una planificación previa de la tarea de campo que comprenda el reconocimiento de la zona.
La mayor parte del tiempo y esfuerzo de un trabajo que involucra mediciones LiDAR, se encuentra en el procesamiento de los datos. El volumen de datos registrados y la capacidad de hardware condicionan seriamente el avance efectivo del trabajo de gabinete.
Se determinó que la versión disponible del software propietario SCENE presenta diversas debilidades en el tratamiento de los puntos individuales de la nube LiDAR, ello genera una alta dependencia de los objetos de referencia artificiales, tanto para integrar los distintos escaneos como para referenciar la nube de puntos en un sistema externo, dejando obsoleta la utilización de puntos naturales. La posibilidad de contar con objetos de referencia naturales facilita y flexibiliza tanto el relevamiento en campo como el procesamiento.
En este trabajo se estableció un procedimiento concreto para la planificación, medición, procesamiento y control de resultados obtenidos con TLS.
La aplicación de la tecnología LiDAR requiere de un grupo de trabajo multidisciplinario. Los profesionales de la agrimensura y la geodesia ocupan un lugar clave en la captura de los datos, la interpretación y el análisis de la calidad de los resultados.
Referencias
Licencia
![]()
A partir de la edición del V23N3 del año 2018 hacia adelante, se cambia la Licencia Creative Commons “Atribución—No Comercial – Sin Obra Derivada” a la siguiente:
Atribución - No Comercial – Compartir igual: esta licencia permite a otros distribuir, remezclar, retocar, y crear a partir de tu obra de modo no comercial, siempre y cuando te den crédito y licencien sus nuevas creaciones bajo las mismas condiciones.

2.jpg)





