
Publicado:
2012-12-05Número:
Vol. 6 Núm. 2 (2012)Sección:
Visión InvestigadoraRespuesta a carga de una prótesis transtibial con elementos infinitos durante el apoyo y balanceo
Palabras clave:
Prótesis, transtibial, elementos finitos, Solid- Works. (es).Descargas
Referencias
M. W. Legro, et ál., “Issues of importance reported by persons with lower limb amputations and prostheses,” Journal of rehabilitation research and development, vol. 36, no. 3, pp. 155-63, Jul. 1999.
A. H. Vrieling, et al., “Gait initiation in lower limb amputees,” Gait & posture, vol. 27, no. 3, pp. 423-30, Apr. 2008.
R. D. English, et al., “Establishment of consistent gait after fitting of new components,” Journal Of Rehabilitation Research And Development, vol. 1985, no. pp. 32-35, Feb. 1995.
M. E. Huang, C. E. Levy, and J. B. Webster, “Acquired limb deficiencies. 3. Prosthetic components, prescriptions, and indications‡,” Archives of Physical Medicine and Rehabilitation, vol. 82, no. 3, pp. S17-S24, Mar. 2001.
Y. Sagawa, K. Turcot, S. Armand, A. Thevenon, N. Vuillerme, and E. Watelain, “Biomechanics and physiological parameters during gait in lower-limb amputees: a systematic review.,” Gait & posture, vol. 33, no. 4, pp. 511-26, Apr. 2011.
J. Sanders, “Effects of changes in cadence, prosthetic componentry, and time on interface pressures and shear stresses of three trans-tibial amputees,” Clinical Biomechanics, vol. 15, no. 9, pp. 684-694, Nov. 2000.
J. Estrada M.,J. A. Camacho P., M.T. Restrepo C., C. M. Parra M.,“Parámetros antropométricos de la población laboral colombiana 1995 Resumen Palabras clave Key words Introducción,” vol. 15, no. 2, pp. 1-24, 1998.
W. C. C. Lee, M. Zhang, X. Jia, y J. T. M. Cheung, “Finite element modeling of the contact interface between transtibial residual limb and prosthetic socket,” Medical engineering & physics, vol. 26, no. 8, pp. 655-62, Oct. 2004.
X. Jia, M. Zhang, and W. C. C. Lee, “Load transfer mechanics between trans-tibial prosthetic socket and residual limb—dynamic effects,” Journal of biomechanics, vol. 37, no. 9, pp. 1371-7, Sep. 2004.
M. B. Silver-Thorn, J. W. Steege, and D. S. Childress, “A review of prosthetic interface stress investigations,” Journal of rehabilitation research and development, vol. 33, no. 3, pp. 253-66, Jul. 1996.
Cómo citar
APA
ACM
ACS
ABNT
Chicago
Harvard
IEEE
MLA
Turabian
Vancouver
Descargar cita
Visitas
Descargas
VISIÓN INVESTIGADORA
Visión Electrónica, 2012-12-01 Volumen:6, Año:2 pág: 82–92
RESPUESTA A CARGA DE UNA PRÓTESIS TRANSTIBIAL CON ELEMENTOS INFINITOS DURANTE EL APOYO Y BALANCEO
RESPONSE TO TRANSTIBIAL PROSTHESIS LOAD WITH FINITE ELEMENTS DURING STANCE AND SWING
Esperanza Camargo C.
Ingeniera en Control Electrónico e Instrumentación y Especialista en Instrumentación Electrónica. Estudiante de Doctorado de la Pontificia Universidad Javeriana. Docente de la Universidad Distrital Francisco José de Caldas y Directora del grupo de investigación “Digiti”. Correo electrónico: ecamargo@udistrital. edu.co
Lely A. Luengas C.
Ingeniera Electrónica. Magister en Ingeniería Electrónica y Estudiante de Doctorado de la Pontificia Universidad Javeriana. Docente de la Universidad Distrital Francisco José de Caldas e integrante grupo de investigación “Digiti”. Correo electrónico: laluengas@ udistrital.edu. co.
Manuel Balaguera
MSc. en Ciencias Físicas, Doctor en Ingeniería y Postdoctorado en el Instituto de Biocomplejidad de la Universidad de Indiana (USA). Especialista en Dinámica de Sistemas y docente de la Pontificia Universidad Javeriana. Correo electrónico: manuel. balaguera@javeriana. edu.co
RESUMEN
En el presente artículo se describe el modelado de una prótesis transtibial y la simulación de su respuesta a carga estática mediante el uso del software comercial “SolidWorks”. La simulación se realizó basado en el método de elementos finitos. El modelo implementado representa una prótesis prescrita a un individuo genérico de 1,70 m de estatura y 80 kgf de peso. Como resultado se encontró que los esfuerzos soportados por los diferentes componentes de la prótesis no exceden los límites mecánicos de sus materiales determinando tensiones, deformaciones y desplazamientos. Esos resultados sugieren que el mecanismo de falla está localizado en las superficies de contacto a lo largo de la prótesis. Este análisis se realiza con el apoyo de los grupos de investigación DIGITI y METIS de la Universidad Distrital Francisco José de Caldas.
Palabras clavePrótesis, transtibial, elementos finitos, Solid- Works.
Abstract
This article describes both the modeling of a transtibial prosthesis and its corresponding simulated response to static load using the commercial software package called “Solid- Works”. The simulation was conducted based on the finite element method. The prosthesis model implemented represents an 80 kgf- 1,70 m individual with a generic prescription. As a result, it was found that the efforts supported by the different components of the prosthesis do not exceed the mechanical limits of their materials. These results suggest that the failure mechanisms are located in the contact surfaces along the prosthesis.
Key WordsProsthetics; transtibial; modeling; finite elements; SolidWorks
Introducción
En el diseño y adaptación de una prótesis se requiere conocer las propiedades y el comportamiento mecánico, tanto de sus partes, como de la estructura final integrada en respuesta a las cargas mecánicas que esta soportará bajo condiciones de uso normal [1].
El uso de herramientas computacionales para el diseño y validación de prótesis toma mayor auge en países como Colombia, en los cuales la población amputada va en aumento por causa de las minas antipersonales. Las prótesis comerciales disponibles en el mercado resultan costosas para la población, que en la mayoría de los casos es de escasos recursos. Nuevos prototipos para prótesis nacionales y también el desarrollo de nuevos prototipos hacen uso del análisis de elementos finitos una herramienta que permite validar la funcionalidad de la prótesis y el comportamiento de sus materiales, y se determina así el máximo rango de desplazamiento y deformación [1].
El presente artículo describe el desarrollo de un modelo mecánico de una prótesis transtibial de acero, para un individuo genérico cuyo peso corporal es de 80 kg.
Inicialmente, se diseñaron e implementaron en SolidWorks modelos para cada una de las piezas estudiando su respuesta mecánica: campos de esfuerzo y deformación unitaria bajo cargas axiales equivalentes al peso corporal soportado en condiciones normales por una sola pierna (40 kgf). Posteriormente, se realizó el ensamblaje y de nuevo se revisó el desempeño de la prótesis en respuesta a la misma carga.
2. Prótesis
La prótesis es una extensión artificial que reemplaza o provee una parte del cuerpo que falta por diversas razones: por una amputación o porque no exista a causa de agenesia.
En caso de amputación y su origen: trauma, enfermedad vascular periférica, infección, entre otras; así como del nivel de la misma: desarticulación de rodilla, transtibial, desarticulación de tobillo [2]; la prótesis cumple las mismas funciones que la parte faltante, como ocurre con las piernas artificiales o las prótesis dentales.
Por otro lado, cuando la amputación se ha realizado por debajo de la rodilla y se hace uso de prótesis, esta última se conoce como transtibial. Los componentes básicos de las prótesis por debajo de la rodilla son el pie y el tobillo, la pierna, el encaje y el sistema de suspensión (figura 1) [3].
Figura 1. Prótesis transtibial
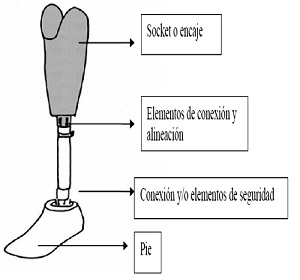
Fuente: elaboración propia.
3. Desarrollo del modelo
Para realizar el análisis de la prótesis se consideró la antropometría del paciente en estudio, y para esto se realizó el modelo geométrico de cada una de las piezas que conforman la prótesis conservando sus medidas y materiales (figura 2).
Figura 2. Prótesis por modelar

Fuente: elaboración propia.
Los amputados de miembro inferior han identificado la comodidad y movilidad como las dos características más importantes de una prótesis. Estos dos elementos son influenciados por su funcionamiento biomecánico y por la transferencia de fuerzas que se registran en la interfaz muñón/socket [4], [5], [6].
El modelo de cada una de las piezas se realizó con el software de análisis y simulación Solid- Works. A continuación se muestran las piezas que constituyen esta prótesis modelada en SolidWorks.
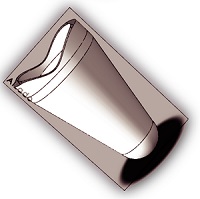
3.1 Socket
Este es el único componente que se diseña especialmente para cada paciente, puesto que las dimensiones del modelo conservaron las características del paciente tales como antropometría, nivel de amputación y estructura del muñón [7], [8].
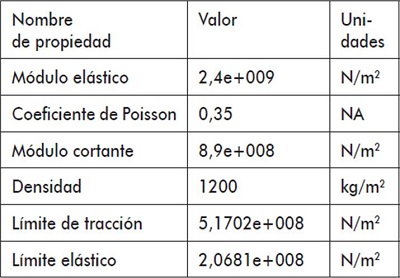
Las dimensiones del socket son: 24 cm de altura, 9 cm de diámetro del muñón y 12 cm de diámetro de la pierna; el material del socket es de fibra de carbono (figura 3).
Figura 3. Modelo del socket en SolidWorks
Fuente: elaboración propia.
3.2 Adaptador de socket
Este es el adaptador entre el socket y el tubo a través de una abrazadera. Las dimensiones del adaptador son 0,8 cm de alto, 5,2 cm de ancho con una conexión de cuatro tornillos a la abrazadera y un tornillo central para la conexión al socket (figura 4).
Figura 4. Adaptador de socket
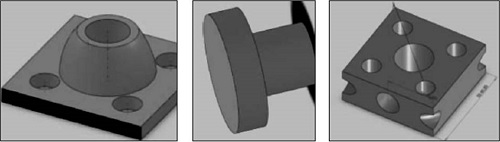
Fuente: elaboración propia.
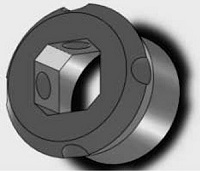
3.3 Abrazadera
Este componente funciona como conector entre el adaptador del socket y el tubo. La pieza tiene un tornillo que permite ajustar el tubo a la abrazadera y otro tornillo que permite la conexión con el adaptador del socket; así mismo, tiene un diámetro de 3,2 cm y 3,8 cm de alto (figura 5).
Figura 5. Modelo de la abrazadera en SolidWorks
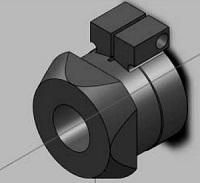
Fuente: elaboración propia.
3.4 Tubo
Este componente permite la adaptación entre el socket y el pie a través de la abrazadera y el adaptador de socket, el cual es el encargado de conectar el pie a través del adaptador de pie (figura 6).
Figura 6. Modelo del tubo en SolidWorks

Fuente: elaboración propia.
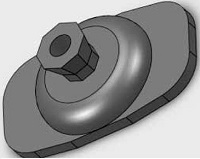
3.5 Adaptador hembra
Este es un elemento conector entre el tubo y el adaptador del pie; su fijación debe ser muy precisa, teniendo en cuenta que este debe entrar de manera justa al adaptador del pie, de lo contrario puede generar una rotación en el pie durante la marcha (figura 7).
Figura 7. Modelo del adaptador hembra en SolidWorks
Fuente: elaboración propia.
3.6 Adaptador de pie
Este permite la conexión entre el pie y el tubo. Este adaptador de pie varía dependiendo del tipo de pie que utiliza el individuo para este caso se utilizó un adaptador para pie SACH (figura 8).
Figura 8. Modelo del adaptador del pie en SolidWorks
Fuente: elaboración propia.
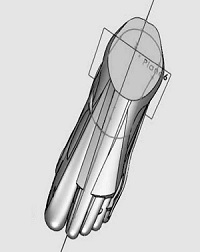
3.7 Pie
El pie es un prototipo de pie sach, ya que por su geometría compleja fue necesario realizar el corte del pie en cinco secciones transversales, posteriormente un proceso de extrusión y un proceso de recubrimiento (figura 9).
Figura 9. Modelo del pie en SolidWorks
Fuente: elaboración propia.
4. Ensamble de componentes
El ensamble de componentes es un proceso que requiere de mucha exactitud en el momento del modelado de estos, ya que la relación debe ser exacta y simétrica.
El adaptador del socket está compuesto por tres piezas. Al realizar el ensamblaje, se requirió identificar el tipo de relación entre estos, así como el tipo de coincidencia.
El ensamblaje del tubo con el adaptador de pie necesitó tres piezas: el tubo, el adaptador hembra y el adaptador de pie. Para este caso es necesario que la geometría del adaptador del pie sea exacta, coincidente y concéntrica con el adaptador hembra y el tubo.
A continuación se muestran algunas de las conexiones entre componentes.
La siguiente figura muestra la prótesis ensamblada con cada uno de los elementos, tales como socket, conectores tubo estructural y pie.
Figura 10.1. Adaptador del socket y tubo ensamblado en SolidWorks
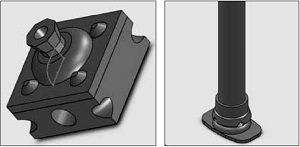
Fuente: elaboración propia.
Figura 10.2. Prótesis modelada en SolidWorks

Fuente: elaboración propia.
5. Análisis de la prótesis utilizando elementos finitos
Una vez realizado el ensamblaje se hace el enmallado de la prótesis para determinar la deformación y el desplazamiento de esta una vez es sometida a carga. Como se mencionó al iniciar el documento, la carga considerada para este análisis es de 400 N de fuerza, toda vez que el individuo pesa 80 kg y el peso debe estar distribuido en cada una de las piernas.
Se realizó el método de los elementos finitos (MEF) para calcular el campo de desplazamientos y, posteriormente, a través de relaciones cinemáticas y constitutivas las deformaciones y tensiones respectivamente, utilizando SolidWorks con el simulador [9], [10].
El MEF convierte un problema definido en términos de ecuaciones diferenciales en un problema de forma matricial que proporciona el resultado correcto para un número finito de puntos, e interpola posteriormente la solución al resto del dominio; de esta manera, resulta solo una solución aproximada. El conjunto de puntos donde la solución es exacta se denomina “conjunto nodos”. Dicho conjunto de nodos forma una red, llamada “malla formada por retículos”. Cada uno de los retículos contenidos en dicha malla es un “elemento finito”. El conjunto de nodos se obtiene dividiendo o discretizando la estructura en elementos [8].
5.1 Preproceso y generación de la malla
La malla generada al seleccionar los elementos finitos, consta en general de miles ( e incluso centenares de miles) de puntos. La información sobre las propiedades del material y otras características del problema se almacena junto con la información que describe la malla.
En la figura 11 se muestra el enmallado de la prótesis.
Figura 11. Enmallado de la prótesis

Fuente: elaboración propia.
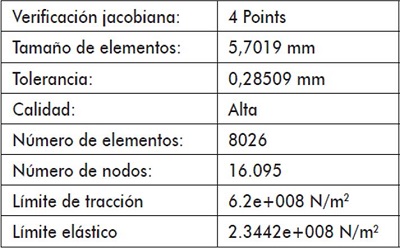
Una vez ensamblada la prótesis, se configura en quince componentes. Teniendo en cuenta que algunas de estos son pequeños tornillos, fue necesario realizar un enmallado fino con los siguientes parámetros mostrados en la tabla 1.
Tabla 1. Características del enmallado
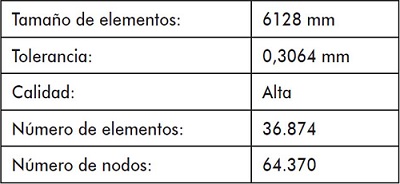
Fuente: elaboración propia.
Así mismo, debe ser considerada la sujeción; para este caso, como sujeción en dos momentos: en la planta del pie cuando está en fase de apoyo, y en las paredes del socket cuando está en fase de oscilación.
A continuación se muestra el análisis de la prótesis, teniendo en cuenta que se realiza la sujeción de esta en la planta del pie, lo cual ocurre durante la fase de apoyo. Por su parte, la carga se aplica en el socket y la aplicación de la carga en la pierna durante la fase de apoyo, en cuyo caso se realiza en el socket con una fuerza igual a 400 N (figura 12). Para la fase de oscilación se analiza la sujeción de la prótesis en la pierna, de manera que la carga es igual al peso de la prótesis, por efectos de gravedad. En consecuencia, la aplicación de la carga en la fase de oscilación es el peso de la pierna por efectos de la gravedad (figura 13).
Figura 12.
- Sujeción de la prótesis en la
planta del pie durante la fase de
apoyo.
- Carga de la prótesis en
el socket durante la fase de apoyo.
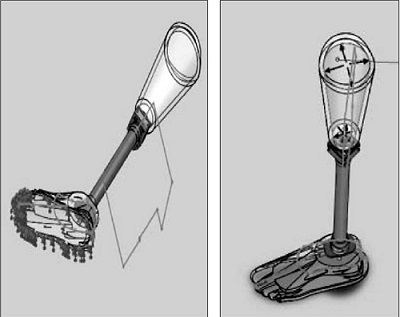
Fuente: elaboración propia.
Figura 13.
- Sujeción de la prótesis en el socket
durante la fase de oscilación.
- Aplicación de la fuerza durante
la fase apoyo.
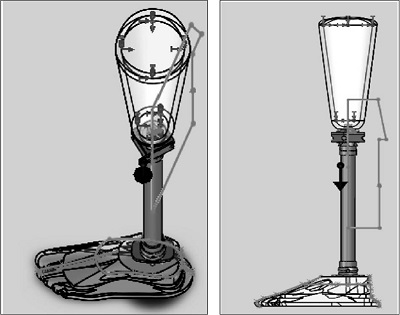
Fuente: elaboración propia.
6. Resultados
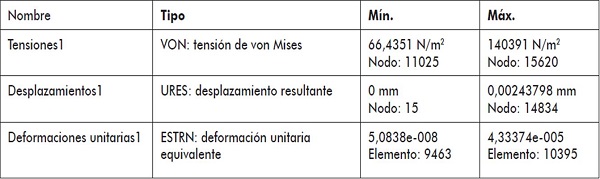
Se realizó el estudio estático de Von Mises, el cual determina los esfuerzos y desplazamientos de un sólido deformable; el punto máximo es el punto donde se produce el mayor esfuerzo producido. Por otra parte, el desplazamiento es la distancia máxima a la cual se lo desplaza el sólido deformable. La deformación unitaria es el mayor desplazamiento que se produce y la ubicación se da en un elemento.
A continuación se muestra la deformación que sufre el socket sometido a una fuerza de 400 N. La masa del socket es de 0,889684 kg y el volumen 0,000741404 m3.
Las características del estudio se muestran en la tabla 2.
Tabla 2. Características del estudio en el socket
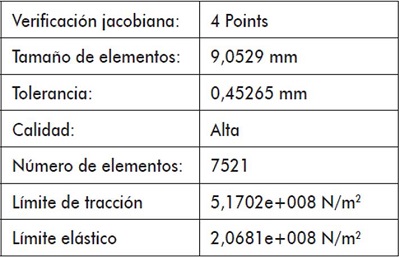
Fuente: elaboración propia.
Comparando el URES máximo (tabla 3) con las propiedades del material, se encuentra que estos están dentro de los límites de tracción de este; por tanto, el comportamiento es elástico y no se produce deformación plástica ni ruptura.
A continuación se muestra la deformación que sufre el tubo sometido a una fuerza de 400 N. La masa del tubo es de 0,647419 kg y el volumen 8,09274e-005 m3 (figura 15).
Las características del estudio se muestran en la tabla 4.
Figura 14.
- Deformación del socket.
- Desplazamiento del socket
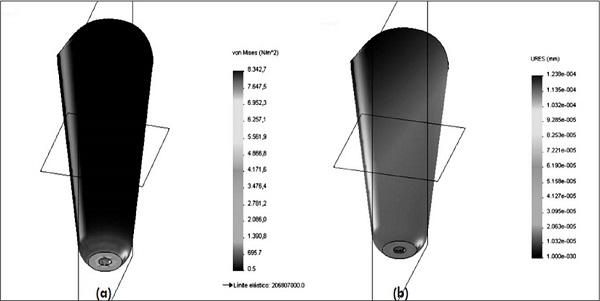
Fuente: elaboración propia.
Tabla 3. Resultados del estudio en el socket
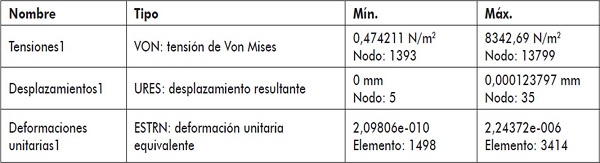
Fuente: elaboración propia.
Tabla 4. Características del estudio en el tubo
Fuente: elaboración propia.
Figura 15.
- Deformación del tubo.
- Desplazamiento del tubo

Fuente: elaboración propia.
En cuanto al estudio, en el tubo, comparando el URES máximo (tabla 5) con las propiedades del material, se encuentra que estos están dentro de los límites de tracción de este; por lo tanto, el comportamiento es elástico y no se produce deformación plástica ni ruptura.
Tabla 5. Resultados del estudio en el tubo
Fuente: elaboración propia.
En la siguiente tabla se muestra la deformación que sufre el pie sometido a una fuerza de 400 N. La masa del pie es de 1,10451 kg y el volumen 0.000920427 m3.
Tabla 6. Características del estudio en el pie
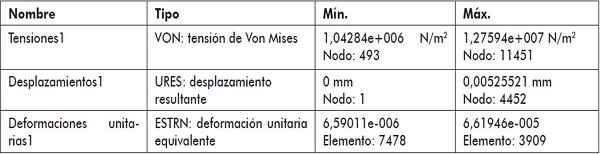
Fuente: elaboración propia.
Figura 16.
- Deformación del pie.
- Desplazamiento del pie
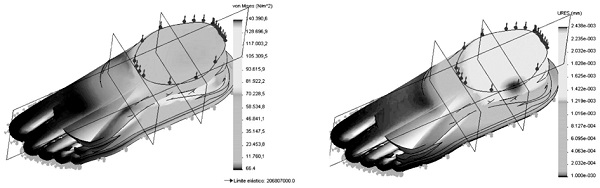
Fuente: elaboración propia.
En cuanto al estudio del pie en el tubo, comparando el URES máximo (tabla 7) con las propiedades del material, se encuentra que estos están dentro de los límites de tracción del mismo; por lo tanto, el comportamiento es elástico y no se produce deformación plástica ni ruptura.
Tabla 7. Resultados del estudio en el tubo
Fuente: elaboración propia.
En términos generales, la prótesis se comporta de manera adecuada, ya que las deformaciones y desplazamientos son mínimos, en relación con las caracteristricas del material.
7. Conclusiones
Este estudio es de vital importancia, ya que en Colombia la fabricación de prótesis todavía es artesanal; por lo tanto, se requiere una investigación de los componentes de acuerdo con el peso y talla del individuo.
Por otra parte, teniendo en cuenta que el pie es una estructura compleja, este es el único componente que no se logró modelar al 100 % en relación con el patrón original; ha sido modelado tan solo en un 80 %. Así mismo, sabiendo que la prótesis tiene elementos muy pequeños como los tornillos del adaptador del socket, es necesario utilizar un enmallado muy fino, lo cual requiere un alto costo computacional.
La selección de los materiales se realizó teniendo en cuenta las características del sujeto modelo y las dadas por los fabricantes de prótesis, las cuales indican que para un peso inferior a 80 kg. el material de los elementos de conexión, alineación y seguridad es de acero.
Por último, una vez analizados la deformación y el desplazamiento a los cuales es sometida la prótesis, se puede concluir que los componentes solo sufren deformación y desplazamientos en el margen de la zona elástica del material, y no se presentan deformaciones plásticas ni rupturas.
Referencias
- [1] M. W. Legro, et ál., “Issues of importance reported by persons with lower limb amputations and prostheses,” Journal of rehabilitation research and development, vol. 36, no. 3, pp. 155-63, Jul. 1999.
- A. H. Vrieling, et al., “Gait initiation in lower limb amputees,” Gait & posture, vol. 27, no. 3, pp. 423-30, Apr. 2008.
- R. D. English, et al., “Establishment of consistent gait after fitting of new components,” Journal Of Rehabilitation Research And Development, vol. 1985, no. pp. 32-35, Feb. 1995.
- M. E. Huang, C. E. Levy, and J. B. Webster, “Acquired limb deficiencies. 3. Prosthetic components, prescriptions, and indications, ” Archives of Physical Medicine and Rehabilitation, vol. 82, no. 3, pp. S17-S24, Mar. 2001.
- Y. Sagawa, K. Turcot, S. Armand, A. Thevenon, N. Vuillerme, and E. Watelain, “Biomechanics and physiological parameters during gait in lower-limb amputees: a systematic review.,” Gait & posture, vol. 33, no. 4, pp. 511-26, Apr. 2011.
- J. Sanders, “Effects of changes in cadence, prosthetic componentry, and time on interface pressures and shear stresses of three trans-tibial amputees,” Clinical Biomechanics, vol. 15, no. 9, pp. 684-694, Nov. 2000.
- J. Estrada M.,J. A. Camacho P., M.T. Restrepo C., C. M. Parra M.,“Parámetros antropométricos de la población laboral colombiana 1995 Resumen Palabras clave Key words Introducción,” vol. 15, no. 2, pp. 1-24, 1998.
- W. C. C. Lee, M. Zhang, X. Jia, y J. T. M. Cheung, “Finite element modeling of the contact interface between transtibial residual limb and prosthetic socket,” Medical engineering & physics, vol. 26, no. 8, pp. 655-62, Oct. 2004.
- X. Jia, M. Zhang, and W. C. C. Lee, “Load transfer mechanics between transtibial prosthetic socket and residual limbdynamic effects,” Journal of biomechanics, vol. 37, no. 9, pp. 1371-7, Sep. 2004.
- M. B. Silver-Thorn, J. W. Steege, and D. S. Childress, “A review of prosthetic interface stress investigations,” Journal of rehabilitation research and development, vol. 33, no. 3, pp. 253-66, Jul. 1996.
Creation date: Diciembre de 2012
.png)



.jpg)


