
DOI:
https://doi.org/10.14483/udistrital.jour.tecnura.2013.1.a02Published:
2013-01-01Issue:
Vol. 17 No. 35 (2013): January - MarchSection:
ResearchDireccionamiento automático de antenas en estaciones terrenas de seguimiento a picosatelites
Downloads
How to Cite
APA
ACM
ACS
ABNT
Chicago
Harvard
IEEE
MLA
Turabian
Vancouver
Download Citation
Direccionamiento automático de antenas en estaciones terrenas de seguimiento a picosatelites
Automatic addressing scheme for antennas at picosatellite-tracking earth stations
Jorge Enrique Espíndola Díaz1, Roberto Ferro Escobar2, Jairo Alonso Mesa Lara3
1 Ingeniero de Sistemas, magister en Ciencias de la Información y las Comunicaciones. Docente de la Universidad Pedagógica y Tecnológica de Colombia. Sogamoso, Colombia. Contacto: jespindola@uptc.edu.co
2 Ingeniero Electrónico, candidato a Doctor en ingeniería de la Universidad Pontificia de Salamanca. Docente de la Universidad Distrital Francisco José de Caldas. Bogotá, Colombia. Contacto: rferro@udistrital.edu.co
3 Ingeniero Electrónico, magister en Ciencias de la Información y las Comunicaciones. Docente de la Universidad Pedagógica y Tecnológica de Colombia. Sogamoso, Colombia. Contacto: jairo.mesa@uptc.edu.co
Fecha de recepción: 6 de septiembre de 2011 Fecha de aceptación: 28 de agosto de 2012
Resumen
El presente artículo muestra los resultados de un proyecto desarrollado en el grupo de investigación en Informática, Electrónica y Comunicaciones (INFELCOM) de la Universidad Pedagógica y Tecnológica de Colombia (UPTC). El objetivo fue desarrollar un software que, acoplado al hardware propio de la estación terrena, ubicada en la UPTC de la ciudad de Tunja (Boyacá, Colombia) y a un software de predicción de órbita [1] desarrollado por INFELCOM, controle en forma automática el posicionamiento de las antenas de dicha estación. Para el control de posicionamiento se emplearon las técnicas de lnteligencia Artificial (lA), algoritmos genéticos de selección y algoritmos de enfriamiento simulado.
Palabras clave: actuador, control, estación terrena, inteligencia artificial.
Abstract
This paper presents the results of a project conducted by a research group called Computer Electronics and Communications (INFELCOM) at Universidad Pedagógica y Tecnológica de Colombia (UPTC). The purpose is to develop a software-tohardware coupled application customized for an earth station (located in the city of Tunja - Boyaca, Colombia) and an orbit prediction software package [1] developed by INFELCOM. This application should automatically control the positioning of the antennas at the station. To design the positioning control, Artificial lntelligence (Al) techniques were used together with selection genetic algorithms, and simulated annealing algorithms.
Key words: actuator, control, ground station, artificial intelligence.
1. Introducción
El término CubeSat fue usado específicamente para referirse a picosatélites que se ajustan a las normas descritas en el Pliego de Diseño Cube-Sat publicado por la California Polytechnic State University (CalPoly), fue originalmente propuesto por el professor Bob Twiggs de la Universidad de Stanford, y se desarrolló más tarde junto con el profesor Jordi Puig-Suari de la Universidad Politécnica de California [2].
El seguimiento y monitoreo de dichos picosatélites se realiza en una base terrestre, a través de un conjunto de elementos que, agrupados, constituyen la llamada estación terrena.
Las antenas son componentes vitales de toda estación terrena ya que, a través de ellas, se puede establecer comunicación con los picosatélites. De la necesidad de garantizar la detección y el seguimiento de estos, surge la idea del presente proyecto.
La estación terrena proyectada para la ciudad de Tunja, no cuenta con un sistema que permita controlar el direccionamiento de las antenas que forman parte integral de ella. Por lo anterior, no está garantizado, para dicha estación, el seguimiento del satélite a lo largo de su recorrido durante el tiempo en el cual puede ser observado, lo que a su vez origina ineficiencia en la comunicación entre la estación y el picosatélite.
El objetivo principal de este trabajo es diseñar un algoritmo que, basado en técnicas de IA, genere en forma autónoma el movimiento de las antenas de la estación terrena satelital.
En la primera parte de este artículo se describen de forma breve los elementos conceptuales propios del proyecto, como son: estación terrena, posicionamiento de antenas, actuadores, algoritmos genéticos y recocido simulado; en la segunda se muestran los resultados obtenidos y por último las conclusiones.
2. Conceptualización
2.1 Estación terrena
Una estación terrena es la parte encargada de transmitir, recibir y procesar los datos del Cubesat en tierra [3]. Es una estación situada en la superficie de la tierra, o en la parte principal de la atmósfera terrestre, destinada a establecer comunicación con una o varias estaciones espaciales; o con una o varias estaciones terrenas, mediante el empleo de uno o varios satélites refectores u otros objetos situados en el espacio [4].
Para este fin, debe estar dotada con radios frecuencia modulada (FM) transmisor-receptor, debe estar acoplada a un módem, un computador, un sistema de antenas y accesorios como servomotores con su respectivo control de posición para el seguimiento del satélite. En este sentido, el control de los servomotores que manipulan el posicionamiento de las antenas, es un factor de vital importancia para el óptimo funcionamiento de la estación.
2.2 Posicionamiento de antenas
El rastreo de un satélite es utilizado para corregir tanto la posición del mismo como de una antena en una estación terrena.
Una vez que el satélite se encuentra en órbita, existen algunas fuerzas no deseadas que dificultan que el satélite permanezca con la misma orientación con respecto a la superficie terrestre.
Debido a las fuerzas perturbadoras, la comunicación de la estación terrena con el satélite puede no ser confiable; en este caso, se requiere de algún sistema de posicionamiento para mantener la antena de la estación terrena con la mejor orientación tanto para la transmisión como para la recepción de la señal [5].
Para poder orientar una antena es necesario tener un montaje que permita realizar movimientos del refector. Existen tres tipos de montajes que puede tener una antena: Azimut-Elevación, X-Y y Ecuatorial o Polar.
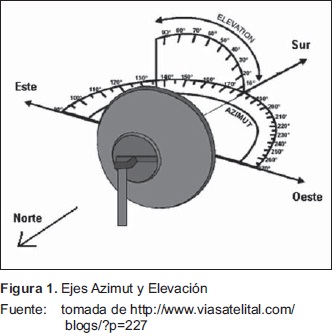
2.3 Azimut-Elevación
La orientación de la antena de una estación terrena hacia un satélite con un montaje Azimut-Elevación se realiza ajustando dos ángulos: en elevación y azimut; los valores de estos ángulos dependen de la posición geográfica de la estación (en latitud y longitud) y de la ubicación del satélite [7].
Tomando como referencia al eje de simetría del plato parabólico, que coincide con su eje de máxima radiación, el ángulo de elevación es aquél formado entre la horizontal y dicho eje de simetría dirigido hacia el satélite; por su parte, el ángulo de azimut es la cantidad en grados que hay que girar la antena en el sentido de las manecillas del reloj (con relación al norte geográfico de la Tierra) para que ese mismo eje de simetría pase por la posición en longitud del satélite.
La elevación es el ángulo al que hay que elevar la antena desde el horizonte para localizar el satélite en cuestión (90° en el ecuador). El azimut es el ángulo horizontal al que hay que girar el eje de la antena, desde el polo norte geográfico terrestre hasta encontrar el satélite (ver Figura 1) [7].
2.4 Inteligencia artificial
A continuación, se relacionan algunas expresiones encontradas para definir lA:
Inteligencia se puede catalogar como la habilidad de reconocer objetos en un espacio abierto, de reconocer patrones, trayectorias y hasta la habilidad de detectar obstáculos y buscar la manera de esquivarlos [9].
Las técnicas de IA son un estilo especial de programación en el que se trata de reproducir comportamientos típicamente inteligentes en un computador [11].
La IA es la rama de las ciencias de la computación que estudia el software y hardware necesarios para simular el comportamiento y comprensión humanos. El objetivo último de la IA es simular la inteligencia humana en una máquina creando robots que sean conscientes y con sentimientos reales, similares a los humanos [12].
2.5 Áreas de investigación de la IA
Dentro de la IA se encuentran técnicas como: lógica difusa, sistemas expertos, redes neuronales, algoritmos genéticos, razonamiento basado en casos, planificación basada en casos, entre otras.
Son muchas las áreas de la IA que se investigan en la actualidad. Entre ellas, se tienen las siguientes [13]:
- La representación del conocimiento, que busca en el descubrimiento de métodos expresivos y eficientes describir información sobre aspectos del mundo real.
- Los métodos de aprendizaje automático, que extienden las técnicas estadísticas con el fin de posibilitar la identificación de un amplio rango de tendencias generales a partir de un conjunto de datos de entrenamiento.
- El campo de la planificación, que enfrenta el desarrollo de algoritmos que construyen y ejecutan automáticamente secuencias de comandos primitivos con el fin de alcanzar ciertas metas de alto nivel.
- Los trabajos en el área de razonamiento posible, que hacen uso de principios estadísticos para desarrollar codificaciones de información incierta.
- La coordinación y colaboración multiagentes, que ha permitido el desarrollo de técnicas para la representación de las capacidades de otros agentes y la especificación del conocimiento necesario para la colaboración entre ellos.
- El desarrollo de ontologías, que persigue la creación de catálogos de conocimiento explícito, formal y multipropósito, que puedan ser utilizados por sistemas inteligentes.
- Los campos de procesamiento de voz y lenguaje, que buscan la creación de sistemas que se comunican con la gente en su lenguaje.
- La síntesis y comprensión de imágenes, que conduce a la producción de algoritmos para el análisis de fotografías, diagramas y videos, así como también de técnicas para el despliegue visual de información cuantitativa y estructurada [14].
2.6 Actuadores
Los actuadores se encargan de gestionar la respuesta deseada de un sistema. Existen actuadores mecánicos, hidráulicos y eléctricos, dependiendo de cuál sea el tipo de energía que emplean. Para el direccionamiento de las antenas de la estación terrena se emplearon actuadores eléctricos, como son los rotores Yaesu G-5500 [15].
El rotor Yaesu G-5500 es un dispositivo electromecánico. Consta de los motores eléctricos, las cajas de engranes, los sensores de posición (potenciómetros). Todo esto encapsulado en un empaque que le brinda la debida protección ante las exigencias climáticas. Este rotor, en realidad, son dos rotores por separado, uno de Azimut y uno de Elevación que pueden ser instalados conjuntamente como se puede observar en la Figura 2, o pueden ser usados por separado obteniendo un resultado de movimiento de Azimut o de Elevación según sea el rotor escogido. Estos rotores que conforman el rotor Yaesu G-5500 están debidamente lubricados y no requieren de mantenimiento según su fabricante [16].

2.7 Métodos de seguimiento
Existen diferentes métodos de control para lograr el seguimiento de objetos en movimiento, pero no todos son aplicables al seguimiento de satélites. El seguimiento puede realizarse por medio de un software, el cual por medio de desarrollos físicos-matemáticos pueda simular con exactitud y precisión el comportamiento del satélite y, al comunicarse con el rotor de las antenas, ubicarlas para una correcta comunicación. Este es un control de lazo abierto, ya que el software en ningún momento recibirá señales de conexión o enlace con el satélite y dependerá únicamente de los resultados de sus operaciones [15].
Otra forma de seguimiento son los controles de lazo cerrado. Son sistemas que por medio de diferentes tipos de control (control por fase, control proporcional integral derivativo, lógica difusa, entre otros) realizados por software o hardware, manipulando las señales enviadas por el satélite, mueven la antena de forma aleatoria o periódica, haciendo un escaneo de la señal del satélite, el cual, al ser encontrado, será seguido por las antenas, buscando siempre una mayor intensidad de señal [16].
2.8 Técnicas de Inteligencia Artificial
Entre las diferentes técnicas existentes de IA, se consideraron fundamentalmente dos:
2.8.1 Recocido simulado
Es una metodología de optimización en la cual, a partir de puntos existentes, se crean vecinos. Si la función generada por esos vecinos es de mejor calidad que la de los puntos existentes, el vecino entra a reemplazar al punto existente. Generalmente, los algoritmos de recocido se ejecutan dentro de un lazo donde su ciclo finaliza cuando se cumple alguna meta deseada; esto no se puede aplicar a los sistemas de tiempo real [17].
2.8.2 Algoritmos genéticos
Simulan procesos que se dan en los seres vivos como el cruce, la mutación y la selección. La idea es que se comienza con una población aleatoria de individuos, se prueba cada individuo con una función de costo y los mejores se cruzan, para provocar la aparición de nuevos individuos. Algunos individuos se mutan o se transforman [18] y [20].
3. Metodología
Para el desarrollo de este proyecto se plantearon varias actividades definidas en las siguientes etapas:
- Etapa uno: optimizar el sistema de antenas usadas en la estación terrena. Se hace necesario definir el tipo de antenas a usar en la estación terrena.
- Etapa dos: obtener información de predicción para la ubicación del pico satélite. Con el uso de software de predicción se pretende saber cuál será la órbita que describirá el satélite.
- Etapa tres: optimización del proceso de búsqueda y establecimiento del enlace estación-satélite. Esta etapa busca definir la técnica de lA a usar para hacer la búsqueda del pico satélite y así poder establecer comunicación con él.
- Etapa cuatro: desarrollo del algoritmo. Por último, se desarrolla un algoritmo que permita, basado en IA, direccionar las antenas de la estación terrena y establecer comunicación con el satélite.
Para el desarrollo del algoritmo que optimiza el control del sistema de antenas de la estación terrena satelital de la UPTC, se consideraron las variables: localización, tiempo y espacio del satélite, posición del sistema de antenas de la estación y ventana de señal, necesarias para establecer el enlace entre el sistema de comunicación de la estación terrena satelital y un pico-satélite.
Mediante el uso de un software de predicción (SOP) [22], desarrollado como parte de la investigación [21], se obtuvo la información necesaria que permite localizar un satélite artificial de órbita LEO (Low Earth Orbit) en un determinado instante de tiempo. De allí, se obtuvieron datos de azimut y elevación que son los que posibilitan localizar un satélite artificial en el espacio.
Luego se definieron los mecanismos a emplear en la optimización del proceso de búsqueda y establecimiento del enlace estación-satélite y se generó como resultado un algoritmo basado en las técnicas: algoritmos genéticos y algoritmos de enfriamiento simulado (ver Figura 3).
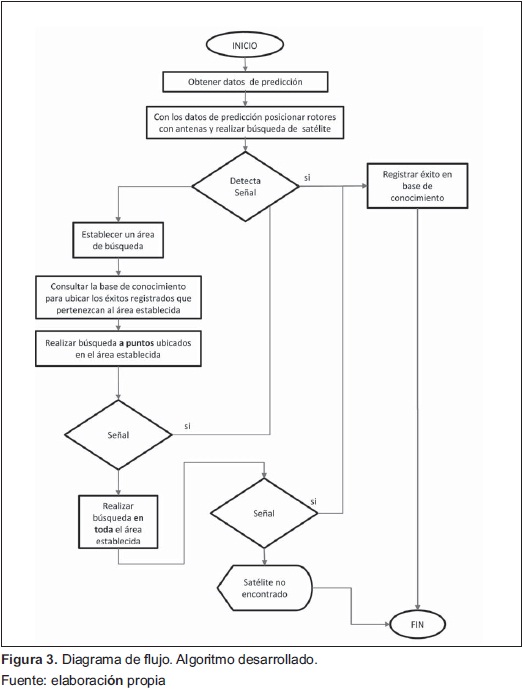
En su primer momento, el algoritmo obtiene los datos de azimut y elevación del módulo SOP de predicción y se envían a los rotores que posicionan las antenas a la espera de recepción de señal del satélite, si se recibe señal, se guarda la coordenada de azimut y elevación etiquetándola como éxito en la base de conocimiento y termina el proceso.
Luego, en caso que no se reciba señal del satélite con las coordenadas obtenidas del módulo SOP, de predicción se define un área de búsqueda, se consulta en la base de conocimiento las coordenadas de los éxitos registrados que pertenezcan al área establecida y se realiza la búsqueda del satélite en dichas coordenadas. Si se recibe señal del satélite, se guarda la coordenada de azimut y elevación etiquetándola como éxito en la base de conocimiento y termina el proceso. Por último, si no se recibe señal del satélite en las coordenadas mencionadas anteriormente se hace una búsqueda en toda el área establecida y si se recibe señal del satélite se guarda la coordenada de azimut y elevación etiquetándola como éxito en la base de conocimiento y termina el proceso; si no se recibe señal se termina el proceso.
En dicha base de conocimiento se registran las coordenadas obtenidas del módulo SOP en las que se logró recibir señal del satélite. La designación de etiqueta de éxito o fracaso de las coordenadas obtenidas del módulo SOP se establece con base a los algoritmos genéticos de selección, en los cuales se les asigna un valor o puntuación a los individuos en virtud de su capacidad de posibilitar la solución del problema planteado; en este caso específico, el problema es la recepción o no recepción de la señal del satélite y la asignación de valor o puntuación es la de éxito o fracaso.
La definición del área de búsqueda se hace con base en el algoritmo de enfriamiento simulado, específicamente con el modelo de metrópolis, el cual es un método de búsqueda para áreas específicas donde se establecen puntos de referencia para encontrar cambios de temperatura. En este caso, el área específica se delimita con los puntos de latitud del satélite, que es la latitud de entrada y salida de la ventana de señal, y con la longitud relativa del satélite, que es la longitud de entrada y salida de la ventana de señal (coordenadas geográficas en donde es posible establecer enlace entre un satélite y una receptor en la tierra).
4. Resultados
Con la utilización de algoritmos genéticos, se logró generar un sistema capaz de automatizar el posicionamiento de las antenas de la estación terrena. Se desarrolló un software que controla el sistema de antenas de la estación terrena satelital de la UPTC implementando un algoritmo basado en inteligencia artificial para optimizar el control de dicho sistema, cumpliendo con los objetivos planteados.
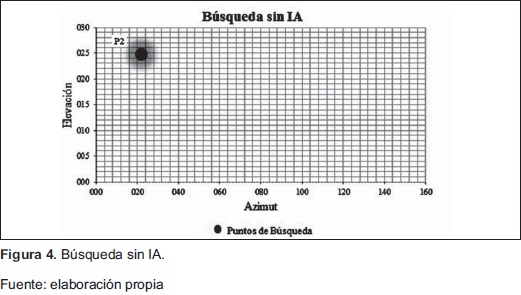
Sin el software, la posibilidad de detección de beacon se limitaba a un solo punto de búsqueda, dado por las coordenadas azimut y elevación, que genera el software de predicción, como se muestra en la Tabla 1 y la Figura 4.

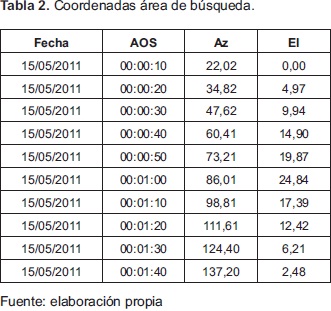
Con el software diseñado, el sistema de posicionamiento de antenas no solamente toma un único punto de búsqueda de beacon (P2) sino que genera un área de búsqueda de señal cuyos vértices están dados por P1, P2, P3 y P4, que corresponden a las combinaciones de los valores mínimo y máximo de azimut y elevación dados por la predicción. Todos los puntos empleados para la búsqueda de beacon deben estar contenidos en dicha área, como lo muestra la Tabla 2 y la Figura 5.
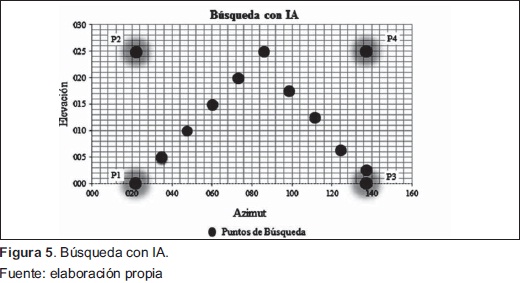
La búsqueda en los puntos dados por el área mencionada hace que la probabilidad de detección de beacon, en el tiempo dado por la ventana de observación, sea significativamente mayor respecto a la situación dada por un solo punto de azimut-elevación.
A continuación se describen los elementos particulares de la aplicación desarrollada:
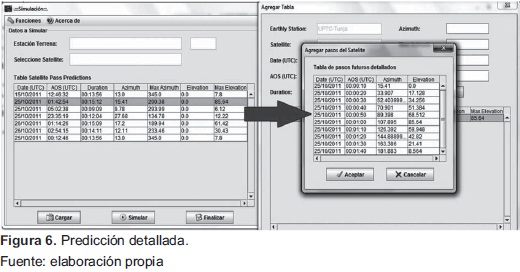
El área de búsqueda está definida por las coordenadas de visualización durante la ventana de observación del pico satélite (ver Figura 6).
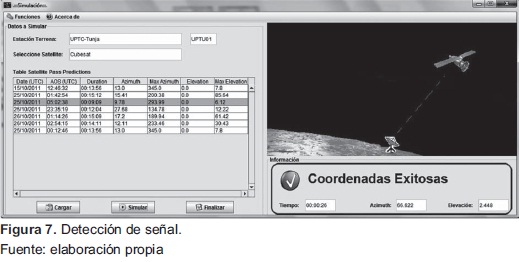
Una vez se cuenta con coordenadas generadas por un software de predicción, el sistema toma como referentes de posicionamiento la estación terrena, el picosatélite y la tabla de predicción.
A partir de estos datos se empieza el proceso de búsqueda de señal. Al detectar señal de beacon, el proceso se detiene reportando el caso de éxito (ver Figura 7).
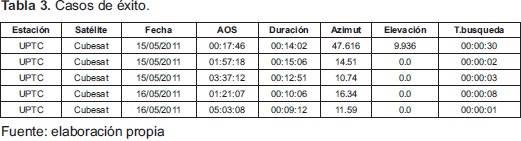
Cada detección se convierte en un caso de éxito que se usará como referente para búsquedas futuras (ver Tabla 3).
5. Conclusiones
A través de la aplicación de inteligencia artificial, sí es posible optimizar el sistema de posicionamiento o direccionamiento de las antenas de estaciones terrenas para seguimiento de pico satélites, ya que el algoritmo desarrollado cumplió con los objetivos propuestos.
El algoritmo resultante optimizó el posicionamiento de las antenas, las técnicas de enfriamiento simulado y algoritmos genéticos, permitió definir el área geográfica a recorrer en busca de la ventana de señal.
La ejecución del proyecto propuesto, permitió no solamente fortalecer el nivel investigativo del grupo INFELCOM, sino que garantiza un impacto regional, liderado por la Universidad Pedagógica y Tecnológica de Colombia, ya que constituye la primera estación terrena de seguimiento a pico satélites del nororiente colombiano.
6. Financiamiento
Este artículo hace parte de la investigación "Diseño e implementación de estación terrena para satélites de órbita LEO", proyecto registrado en la Dirección de Investigaciones, quien, junto a la Facultad de Ingeniería de la Universidad Pedagógica y Tecnológica de Colombia financian este proyecto.
Referencias
[1] J. Espíndola, Seguimiento de Órbitas Leo Basado en Técnicas de Inteligencia Artificial, [Tesis de Maestría] Universidad Distrital Francisco José de Caldas, Bogotá, 2009.
[2] Cubesat: Satélites para todos, [en línea]. Disponible: http://www.iccc.es/2006/07/cubesat-satelites-para-todos/
[3] T. Pratt, C. Bostian and J. Allnutt, Satellite Communications, New York: Editorial Wiley, 2006
[4] Practicas de radio, "Temario de radiocomunicaciones", en Expresiones y definiciones básicas, [en línea]. Disponible: http://www.practicasderadiocomunicaciones.com/Modules/Apuntes/tema01.aspx
[5] A. Cardama y S. Blanch, Antenas, México: Editorial Alfaomega, 1999.
[6] A. Corbasi, Sistemas de Navegación, Madrid: Editorial Mc. Graw Hill, 1998.
[7] Nuevas Tecnologías. Información Técnica sobre Tecnología Satelital, Televisión Satelital, VoIP y Wireless, [en línea]. Disponible: http://www.viasatelital.com/blogs/?p=227
[8] M. Aranda, Hexápodo controlado por tres servomotores, Universidad Pontificia Bolivariana Seccional Bucaramanga, [en línea]. Disponible: http://expoelectronica.upbbga.edu.co/pdf_2005/spidark.pdf
[9] P. Adarraga, M. Belinchón y J. Zaccagnini, Un sistema basado en técnicas de inteligencia artificial para ayudar al diagnóstico de autismo, Universidad Autónoma de Madrid, [en línea]. Disponible: http://www.aetapi.org/congresos/salamanca_93lgpg/avances_02.pdf
[10] J. Malpica, [profesor titular en el Departamento de Matemáticas de la UAH, en el área de conocimiento Ingeniería Cartográfica, Geodesia y Fotogrametría lnteligencia Artificial y Conciencia], [en línea]. Disponible: http://www2.uah.es/benito_fraile/ponencias/inteligencia-artificial.pdf
[11] S. Russell y P. Norvig, Inteligencia Artificial-Un enfoque moderno, Madrid: Editorial Pearson Hall, 2007.
[12] L. García, Usos y aplicaciones de la inteligencia artificial, [en línea]. Disponible: http://www.uv.mx/cienciahombre/revistae/vol17num3/articulo/inteligencia/index.htm
[13] Yaesu Musen Co., Antenna azimuth-elevation rotators & controller, Instruction Manual G-5500, [en línea]. Disponible: http://www.yaesu.co.uk/files/G-5500%20Operating%20Manual_a.pdf
[14] D. Andrade y L. Núñez, Diseño del sistema de control físico para el posicionamiento de la antena de la estación terrena del proyecto cubesat en la Universidad Surcolombiana, Universidad Surcolombiana, Facultad de Ingeniería. pp. 18-19
[15] D. Andrade y L. Núñez, Diseño del sistema de control físico para el posicionamiento de la antena de la estación terrena del proyecto cubesat en la Universidad Surcolombiana, Universidad Surcolombiana, Facultad de Ingeniería, p. 21.
[16] J. Hoyos, J. Cardona y R. Arango. "Control en línea con algoritmos genéticos y recocido simulado", Scientia Et Technica, agosto, Vol. Xlll, No. 035.
[17] H. Restrepo, C. Peña y A. Pérez, "Hacia el desarrollo de nuevas máquinas computacionales", Energía y Computación, octubre de 2000.
[18] M. Hernández, "Los algoritmos genéticos en el ajuste óptimo de reguladores". Energía y Computación, Univalle, Vol. VI, No. 1, ed. 12, 1997.
[19] H. Salazar y otros, "Entrenamiento de una red neuronal artificial usando el algoritmo de simulatedannealing", Sci. Tech, Año X, No. 24, UTP, mayo 2004.
[20] J. Espíndola y otros, "Seguimiento de órbitas de satélites LEO basado en técnicas de inteligencia artificial", Revista Tecnura, No. 24. pp. 25-34.
License
Esta licencia permite a otros remezclar, adaptar y desarrollar su trabajo incluso con fines comerciales, siempre que le den crédito y concedan licencias para sus nuevas creaciones bajo los mismos términos. Esta licencia a menudo se compara con las licencias de software libre y de código abierto “copyleft”. Todos los trabajos nuevos basados en el tuyo tendrán la misma licencia, por lo que cualquier derivado también permitirá el uso comercial. Esta es la licencia utilizada por Wikipedia y se recomienda para materiales que se beneficiarían al incorporar contenido de Wikipedia y proyectos con licencias similares.
