DOI:
https://doi.org/10.14483/23448393.2719Published:
2004-11-30Issue:
Vol. 10 No. 2 (2005): July - DecemberSection:
Science, research, academia and developmentTeoría, Diseño Básico y Señales Recibidas por un Sistema LIDAR para Mediciones Atmosféricas
Theory, Basic Design And Signals Received For A Lidiar System For Atmospheric Measurements
Keywords:
atmósfera, dispersión, extinción, haz láser, lidar (es).Downloads
References
KILLINGER, Dennis. CHURNSIDE, James. ROTH, Laurence. Handbook of optics. Vol 1. Chapter 44. Atmospheric Optics. p.44.2,44.4-44.21
TARDIF, Robert. Boundary Layer Aerosol backscattering and its relationship to relative humidity from a combined Raman elastic backscattering LIDAR. Project for ATOC 5235 Remote Sensing of the atmosphere and oceans. Lidar remote sensing. p.4.2002. http://www.rap.ucar.edu/staff/tardif/CUprojects/ ATOC5235/
WILCOX, William E. Development and experimental verification of a high resolution, tunable LIDAR computer simulation model for atmospheric laser remote sensing. p.15-17,18-32. 1995
ALPERS. EIXMANN. HÖFFNER. KÖPNICK. SCHNEIDER, VON ZAHN. The Rayleigh/Mie/Raman LIDAR at IAP Kühlungsborn, Germany (54°N, 12°E). http://www.iapkborn.de/optik/aer_trop/_vti_cnf/aer_trop_d.htm
BLANC, Carlos. CUESTA, Juan. GIMENEZ, Pablo. PEREYRA, Gonzalo. Sistema de control electrónico del LIDAR MWLS. Cap. 5. p. 44-47, 76-82. 2001.
PHILIPS SEMICONDUCTORS. 1N4148 1N4448 High speed diodes datasheet. http://www.semiconductors.philips.com.
NATIONAL SEMICONDUCTOR. LMH6702 datasheet. www.national.com
BURR BROWN. OPA648 datasheet. http://www.datasheetarchive.com
MEASURES, Raymond. Laser Remote Sensing. Fundamentals and applications. Ch. 6. p. 205-219. Ch. 5. p. 173 174. Ch 1. 27-34. Ch. 7. p. 255-265. Ch.2. p. 42. Ch. 4. p. 142-145. Ch. 8. p. 296-300. 1992. Ed. Krieger Publishing Company.
SPIRICON INC. Laser Beam Profiling. Chapter 2. Theory of Operation. www.spiricon.com/pdf/ch2a.pdf
GIGAHERTZ-OPTIK. Properties and concepts of light and color. p. 4-8. http://www.gigahertz-optik.de/pdf/catalogue/ Tutorials.pdf
NEWPORT CORP. High Energy Nd:YAG Laser Mirrors. www.newport.com/High-Energy_NdYAG_e3534.pdf
MELLES GRIOT. Beam Samplers. www.mellesgriot.com
LASER COMPONENTS Ltd. Diffractive Optics from Holo /Or. www.lasercomponents.com/pdf/holoor/diff_opt.pdf
LAMBDA / TEN OPTIS. Laser Beam Expanders. http:// www.mcphersoninc.com/lambdaten/laserbeamexpanders.htm
MEADE INSTRUMENTS CORPORATION. 8", 10", 12", 14", 16" LX200GPS Schmidt-Cassegrain Telescopes. 7" LX200GPS Maksutov-Cassegrain Telescope with Autostar II Hand Controller. Instruction Manual. www.meade.com
HAMAMATSU PHOTONICS. Low Light Level in the NIR. NIR photomultiplier tube R5509-42. http://www.hamamatsu.com
HAMAMATSU PHOTONICS. PMT Handbook. Ch. 1. p.12-18. Ch. 3. p64. Ch 7. p. 158-187. Ch. 3. p. 35. 1996.
BENDER, Jon, WEST, Alan. Atmospheric Absorption of Muons from Cosmic Rays. http://www.mountmichaelhs.com/crop/ papers/atmosabsorp.htm
How to Cite
APA
ACM
ACS
ABNT
Chicago
Harvard
IEEE
MLA
Turabian
Vancouver
Download Citation
Ingeniería, 2005-00-00 vol:10 nro:2 pág:67-78
Teoría, diseño básico y señales recibidas por un sistema LIDAR para mediciones atmosféricas
Theory, basic design and signals received for a lidar system for atmospheric measurements
Héctor Hernán González Becerra
Ingeniero Electrónico de la Universidad Distrital.
Jaime Humberto Angulo Chavarro
Profesor de la Facultad de Ingeniería de la Universidad Distrital.
Resumen
LIDAR (LIght Detection And Ranging) es un sistema de detección remota activa que utiliza principios similares al radar, usando un haz láser. La interacción luz atmósfera produce fenómenos ópticos que el sistema detecta, mide y procesa. De acuerdo con las características instrumentales tanto en la etapa de transmisión como en la de recepción, pueden extraerse diferentes parámetros atmosféricos como perfiles de temperatura, densidad, niveles de concentración de aerosoles, contaminación, ozono y otros. Se presenta la conceptualización teórica y el diseño de un sistema general, para finalizar con una aproximación a las señales que recibiría un LIDAR real.
Palabras clave:
atmósfera, dispersión, extinción, haz láser, lidar.
Abstract
LIDAR (LIght Detection And Ranging) is an active remote sensing system that uses principles somewhat like the radar, but using a laser beam. The light atmosphere interaction yields optical fenomena that the system detect, measure and process. In agreement with the instrumental features both transmission and reception stages, can be to extract several atmospheric features like temperature profiles, density, concentration levels of particles and aerosols, pollution, ozone and others. Introducing to the theoretic concepts and the design of a basic system, and to end, an aproximation to the signals that would receive an actual LIDAR.
Key words:
atmosphere, scattering, extintion, laser beam, LIDAR.
1. INTRODUCCIÓN
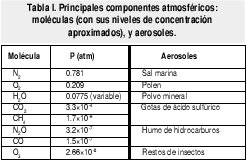
La óptica atmosférica involucra la transmisión, absorción, emisión, refracción y reflexión de la luz por parte de la atmósfera y es probablemente uno de los fenómenos ópticos del que se hacen más observaciones. La atmósfera es un fluido que interactúa con la luz debido a su composición, que bajo condiciones normales, está constituida por una gran variedad de especies moleculares y pequeñas partículas o aerosoles. Estas propiedades físicas y químicas cambian en función del tiempo, la altitud y la ubicación geográfica (son altamente dependientes de las condiciones locales y regionales). La mayoría de estas propiedades pueden describirse en un nivel adecuado observando la composición de lo que generalmente se denomina atmósfera estándar. De esta manera, se obtiene una base para la determinación cuantitativa de la interacción a nivel molecular de gases, aerosoles y partículas en la atmósfera con un frente de onda óptica que se propaga a través de ésta.
La tabla I muestra los principales componentes a nivel molecular y sus niveles de concentración aproximados en unidades de atm. También se muestran algunos componentes a nivel de aerosoles.
2. TEORÍA DE LA INTERACCIÓN LUZ ATMÓSFERA
La transmisión lineal de un haz de luz monocromática a través de la atmósfera puede expresarse aproximadamente por la ley de BeerLambert como

donde I(λ, t, x) es la intensidad del haz óptico después de haber seguido una trayectoria x, k(λ) es el coeficiente de extinción o atenuación, y N(x, t) es la distribución espacial y temporal de las especies que están produciendo la absorción; es la longitud de onda de la luz monocromática, y el parámetro de tiempo t se inserta para recordar el retardo de propagación.
En cuanto al coeficiente de extinción, es común escribirlo en términos de coeficientes que representan los diferentes fenómenos que causan la extinción del haz.

donde los subíndices representan las contribuciones individuales de la absorción, la dispersión Rayleigh y la dispersión Mie respectivamente.
2.1 Fenómenos de dispersión
La dispersión Rayleigh es una dispersión elástica de la radiación óptica debida al desplazamiento de la nube electrónica que rodea las moléculas gaseosas que son perturbadas por el campo electromagnético incidente. Este fenómeno se asocia con la dispersión óptica donde la longitud de onda de la luz es mucho mayor que la dimensión física de los dispersores (moléculas atmosféricas). La dispersión Mie es similar a la dispersión Rayleigh, excepto que el tamaño físico de los dispersores es del mismo orden de magnitud de la longitud de onda de la luz incidente y que además se presenta una dependencia funcional más compleja [1].
3. LIDAR
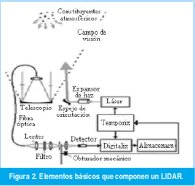
Un LIDAR (acrónimo de LIght Detection And Ranging) es un instrumento activo de detección remota, lo que quiere decir que transmite radiación electromagnética, capta y mide la radiación que se dispersa de retorno (backscattering), por medio de un dispositivo receptor luego de que ésta ha interactuado con diversos constituyentes de la atmósfera. Es el equivalente óptico del radar de microondas, y se le denomina frecuentemente radar láser. Se usa para medir con precisión distancias y una gran variedad de propiedades de la atmósfera, sus componentes y objetos lejanos. La operación del sistema se ilustra en la figura 1, que muestra los elementos básicos que realizan las funciones de transmisor y receptor.

Un sistema LIDAR típico usa un láser pulsado o de onda continua para propagar un haz a través de la atmósfera. El haz se expande para minimizar su divergencia, y se dirige hacia la atmósfera por medio de un espejo inclinado. A medida que viaja a través de la atmósfera, es reflejado o dispersado por objetos sólidos, constituyentes atmosféricos y aerosoles. La luz dispersada se recolecta en el campo de visión de un telescopio (FOV) y se redirige hacia un detector por medio de fibra óptica o cualquier otro mecanismo. Se usan filtros para eliminar la luz que no corresponde a la longitud de onda del láser, mientras que un obturador mecánico bloquea el retorno a bajas alturas. La cantidad de luz recibida se mide en función del tiempo usando fotodetectores con la sensibilidad adecuada. La señal proveniente del detector se analiza con la ayuda de electrónica de alta velocidad para obtener la información del objetivo en sí mismo o de la atmósfera entre el objetivo y el receptor [2].
La figura 2 muestra los componentes básicos del LIDAR.
Un sistema LIDAR también puede operar a diferentes longitudes de onda para tomar ventaja de las características espectrales de la atmósfera (si se usa un láser adecuado). La técnica se denomina LIDAR de absorción diferencial (DIAL).
3.1 Ecuación LIDAR
La señal LIDAR o potencia retornada desde un objetivo sólido, Pr puede describirse por medio de la ecuación (Killinger, 1987)

donde Pt es la potencia transmitida, F(r) es el factor de cruce óptico del haz transmitido con el campo de visión del telescopio en un rango r, A es el área del telescopio (m2), K es la eficiencia óptica del sistema, es la reflectividad del objeto (sr-1), r es el rango del objetivo (m), y T (r) es el coeficiente total de absorción (km-1) de la atmósfera en el rango r.
Puede verse de la ecuación que la potencia retornada es esencialmente la fracción de luz reflejada en un hemisferio de área 2πr2 y captada por el telescopio de área A. La potencia recibida es proporcional a la potencia transmitida y al área de colección del telescopio, y disminuye con respecto al rango como 1/r2 y la ley de Beer-Lambert. La eficiencia óptica K, y el cruce del haz láser con el campo de visión del telescopio, que es una función del rango, F(r), pueden reducir adicionalmente la cantidad de señal recibida por el sistema.
Cuando se usa la ecuación LIDAR para aerosoles y partículas se cambia la reflectividad del objetivo por

donde β(λ,r) es el coeficiente de dispersión de retorno atmosférico (m-1sr-1), τ es la duración del pulso del láser (s), y c es la velocidad de la luz (m/s). La resolución en rango está determinada por la velocidad de la luz y la duración del pulso del láser, como cτ/2.

La potencia retornada es una función del rango Pr(r), y está determinada por
El conjunto óptico de láser transmisor/telescopio receptor en un sistema LIDAR determina el factor de cruce F(R). Este factor proporciona la fracción del haz láser transmitido que se cruza progresivamente con el campo de visión del telescopio y es enfocado por el mismo sobre el detector. Este factor, que se emplea en las ecuaciones LIDAR está dado por la razón del área efectiva del telescopio con respecto al área real y oscila entre 0 y 1. Puede determinarse por medio de

donde A(r) es el área efectiva del telescopio y Ao es el área real [3].
3.2 Esquema de transmisión
El esquema de la etapa de transmisión de un sistema LIDAR con un láser de alta energía que produce tres longitudes de onda se presenta en la figura 3.
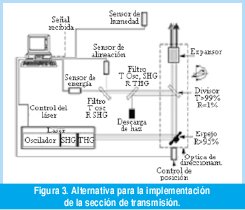
3.3 Sensor de energía
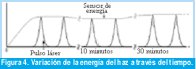
El sensor de energía mide la intensidad del haz emitida por el láser, de forma que se pueden conocer las variaciones de la misma en el transcurso de los experimentos, para posibilitar la ponderación de las mediciones realizadas de la señal de dispersión de retorno con respecto a la intensidad inicial.
La variación de la energía emitida se debe a los cambios en el rendimiento láser, producto de cambios en las condiciones ambientales tales como la temperatura a lo largo del día. De esta forma, la variación solo resultará significativa si se realiza una observación de la misma a través de un cierto intervalo de tiempo largo con respecto a la repetición del disparo del láser. Entonces, no es necesaria la adquisición del valor de energía de cada pulso, sino que es suficiente una medición periódica (por ejemplo cada segundo), para posteriormente tomar un promedio y poder así observar alguna variación. De igual manera, un hecho que se debe tener en cuenta en el momento de definir el método de medición de la energía es que la forma del pulso emitido por el láser se mantiene aproximadamente constante, por lo que el valor pico de la señal resulta ser un parámetro representativo con respecto a la energía emitida por pulso. El concepto de la observación se muestra en la figura 4 [5].
3.4 Esquema de recepción
En la etapa de recepción, existen dos configuraciones básicas. El arreglo biestático involucra una separación considerable del transmisor y el receptor para lograr la resolución espacial. Actualmente, este arreglo se usa muy poco, por lo que en la mayoría de los casos se usa una configuración mono-estática. Un LIDAR monoestático puede ser coaxial o biaxial. En un sistema coaxial el eje del haz láser es coincidente con el eje de la óptica de recepción, mientras que en el arreglo biaxial el haz láser entra o se superpone al campo de visión del receptor óptico a partir de algún rango predeterminado.
En cuanto a los telescopios, los reflectantes newtonianos o cassegrainianos son a la fecha los más utilizados como receptores ópticos. En la figura 5 se representa un sistema biaxial newtoniano.
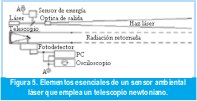
Las características básicas instrumentales en la determinación y la elección de un fotodetector incluyen la respuesta espectral, eficiencia cuántica, respuesta en frecuencia, ganancia de corriente y corriente de oscuridad. Los detectores preferidos por su alta ganancia y sensibilidad, ya que se van a recibir señales muy débiles, son los tubos fotomultiplicadores [9].
El esquema de los elementos que componen la etapa de recepción LIDAR se muestra en la figura 6 [4].

4. DISEÑO BÁSICO DEL SISTEMA
4.1 Características del haz láser
De la hoja de especificaciones de un láser comercial se conoce:
- Enfocabilidad: (M2) @ λ (n m) (método para medir la calidad del haz. Se basa en la comparación del haz a medir con un haz gaussiano puro).
- Divergencia del haz:(θo) @ λ (n m)
La ecuación para medir el diámetro del haz es

Con este valor puede predecirse el diámetro del haz en cualquier punto a lo largo del eje de propagación, utilizando la ecuación

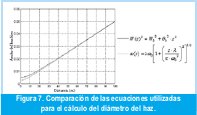
Puede comprobarse mediante otra ecuación el resultado anterior, en el se tiene en cuenta el valor de ωo, que corresponde al tamaño del punto focal en la cintura (es decir, el plano z = 0).

donde θ dG corresponde a la mitad del ángulo de divergencia del haz gaussiano limitado en difracción. Además, el punto focal en la posición axial z es
Se compara gráficamente el resultado de las dos ecuaciones a una distancia máxima de 100 m.
Además, es instructivo comparar este resultado con el de una onda plana ideal (que tiene coherencia espacial perfecta e irradiancia uniforme). La aplicación del principio de Fresnel-Huygens a una onda plana como esta produce la mitad del ángulo de divergencia [10].

El rango Rayleigh es la distancia a partir de la cintura donde un haz de un diámetro circular se incrementará al doble del área que tenía en la cintura, o donde su diámetro se incrementará a√2. En la práctica, el valor de rango Rayleigh se usa para describir una región en la que un láser se considera colimado. Más allá de este rango, el haz se extenderá linealmente [9].

La potencia radiante Φe se define como la potencia total de radiación emitida por una fuente, transmitida a través de una superficie o que incide sobre la misma.
Teniendo en cuenta las especificaciones del láser:
- Energía por pulso: Qe @ λ= <mJ>
- Duración de pulso: τ @ λ <ns>

La irradiancia Ee describe la cantidad de potencia radiante que choca con una superficie por unidad de área. Se calcula mediante la ecuación

donde A es el área de la superficie y puede utilizarse el diámetro del haz determinado anteriormente [11].
4.2 Optica de direccionamiento del haz
Para dirigir el haz hacia la atmósfera se requiere el uso de un espejo inclinado que produzca bajas pérdidas y capaz de resistir la muy alta potencia. La hoja de especificaciones de un dispositivo comercial ofrece valores de reflectancia paralela (-p) y perpendicular (s) diferentes, así que se calcula un valor de reflectancia promedio

Para determinar el umbral de daño, que establece si el espejo (y en general los elementos ópticos que se utilizarán), resiste la potencia del haz incidente [12].

4.3 Divisor (muestreador) de haz
El divisor de haz es un elemento que se requiere para extraer una porción pequeña del haz láser, o muestra, con la cual se realizan tareas como:
- Determinación de la energía del haz.
- Alineación de los sistemas ópticos de envío del haz a la atmósfera.
Por las características anteriores se decide utilizar un divisor especial denominado muestreador de haz. Pueden utilizarse muestreadores comerciales de tipo reflectivo o difractivo, cuyos diagramas se muestran en la figura 8.
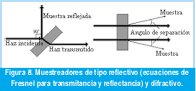
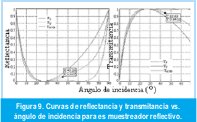
En el caso del muestrador reflectivo, la figura 9 muestra el comportamiento de la reflectancia y transmitancia con respecto al ángulo de incidencia del haz.
El más recomendable en este caso es el tipo difractivo, ya que la potencia de la muestra es más baja, con lo que se evita la saturación o incluso el daño del sensor de energía. Además, la porción transmitida presenta menos pérdidas.[13], [14].
4.4 Expansor
Las aplicaciones láser para mediciones atmosféricas requieren de diámetros de haz mayores que los producidos por la salida de un láser común, además, es necesario disminuir la divergencia, para mantener la potencia tan confinada como sea posible sin que las grandes distancias recorridas influyan excesivamente. Por otra parte, la alta energía en un diámetro de haz tan reducido produce interacciones indeseables con la atmósfera (especialmente a bajas alturas), por lo que un expansor de haz aumenta dicho diámetro disminuyendo esas interacciones.
La ecuación que permite determinar el diámetro del haz a cualquier distancia es

donde BL es el diámetro del haz a una distancia L, b es el incremento en el diámetro, que resulta de β= potencia del expansor (razón de expansión)* diámetro del haz y θ es la disminución de la divergencia del haz que corresponde a = divergencia del haz / potencia del expansor (razón de expansión)
El diámetro de los lentes y sus distancia focales puede determinarse de la ecuación

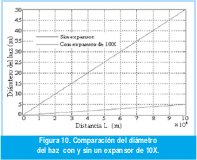
En la figura 10 se muestra una comparación del comportamiento del diámetro del haz cuando se usa el expansor. La figura 11 describe lo que ocurre con la irradiancia en las mismas condiciones.
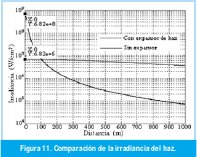
La figura 11 demuestra que cuando se utiliza expansor la potencia del haz no disminuye tan rápidamente que si no se usara [15].
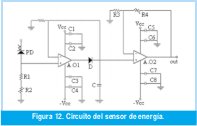
4.5 Diseño básico del sensor de energía
El requerimiento de carga establece que el circuito debe ser capaz de incrementar su señal de salida en un 10% por pulso. Esto indica que la carga del condensador llegará a su valor máximo después de 10 pulsos.

A continuación, se calcula el valor de la resistencia de salida del amplificador operacional realimentado durante la carga:

donde rD es la resistencia equivalente del diodo en directo, rsal es la resistencia de salida del amplificador operacional, AOL es la ganancia en lazo abierto del operacional y B la porción de la señal de salida que ingresa como realimentación en la entrada inversora. B es igual a:

El requerimiento de descarga establece que durante el período entre pulsos la descarga debe ser del 1% de la señal, entonces:

Mediante las anteriores ecuaciones, y teniendo en cuenta que se trabaja con pulsos del orden de nanosegundos, lo que implica componentes de alta velocidad, se presenta el circuito para el sensor de energía [5].
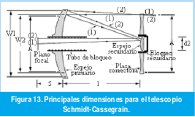
4.6 Telescopio (recepción)
En la etapa de recepción, utilizando dispositivos comerciales, pueden calcularse las dimensiones físicas del telescopio. Nótese la gran longitud focal que se logra en un dispositivo bastante compacto, lo que representa una de las principales ventajas del tipo Schmidt-Cassegrain. La ecuación 23 permite calcular dicha longitud focal

donde f1 es la distancia focal del espejo primario y f2 es la distancia focal del espejo secundario. l es la separación entre los espejos primario y secundario, que puede determinarse a partir de

donde S es la distancia del vértice del espejo primario al foco Cassegrain (o foco secundario).
La figura 13 muestra el esquema general de las dimensiones físicas del telescopio tipo Schmidt-Cassegrain que usa el sistema [16].
4.7 Factor de cruce
El factor de cruce proporciona la fracción del haz que se cruza progresivamente con el campo visual del telescopio. La figura 14 muestra el concepto.

Para su determinación se usan las siguientes ecuaciones:

que en este caso usará a W0 como el radio del haz en lugar del diámetro, (y por lo tanto θ es el ángulo medio de divergencia del haz).
El campo visual del telescopio (FOV) en el plano del objetivo es un círculo de radio

donde r0 es el radio del espejo primario del telescopio, por lo tanto corresponde a la apertura, Φ es el ángulo medio de apertura de la óptica de recepción, que podría denominarse ángulo de divergencia para el campo visual del telescopio, y se define como

donde F es la longitud focal efectiva del telescopio. Con lo anterior, el factor de cruce se escribe como

donde A representa la función de área de cruce. La separación de los ejes del telescopio y el láser en el plano del objetivo es

donde d0 es la separación de los ejes en el LIDAR y δ representa el ángulo de inclinación entre los ejes. Se introducen los siguientes parámetros adimensionales para realizar el cálculo
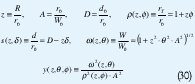
entonces el factor de cruce puede representarse

donde


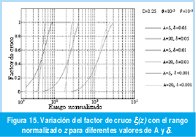
De acuerdo a lo anterior, el factor de cruce ξ(z) depende del rango z, de los valores de los parámetros angulares θ, Φ, y λ de parámetros de escala A y D.
La figura 15 indica el comportamiento del factor de cruce en un rango normalizado para un sistema LIDAR biaxial que presenta un ángulo de inclinación entre los ejes ópticos del láser y el telescopio [9].
4.8 Tubo fotomultiplicador (PMT)
El circuito asociado con el tubo fotomultiplicador debe ser el que permita aprovechar mejor las características de alta sensibilidad y bajo ruido. De acuerdo a esto, el fabricante sugiere el uso de un circuito divisor progresivo al comienzo y al final del PMT. También se utilizan condensadores de desacople en las tres últimas etapas, una resistencia y un condensador que constituyen un circuito pasabajo en la línea de alto voltaje. Se muestra en la figura 16 este tipo de circuito progresivo.

En el diseño del circuito se elige un valor de la fuente de alto voltaje que no exceda el máximo recomendado por la hoja de especificaciones, y se realiza la sumatoria de las relaciones de voltaje entre etapas

Dicho valor se usa para determinar el voltaje en cada etapa. También, de acuerdo al fabricante, se tiene el valor de la corriente promedio en la salida del PMT (IP), con la cual puede determinarse la corriente a través de la fuente de alto voltaje y el divisor.
Con lo anterior, es posible calcular el valor de las resistencias en cada etapa del divisor. Con valores de voltaje y resistencia de carga sugeridos por el fabricante, se procede a calcular la carga en la salida del PMT

Teniendo en cuenta que Q3100Q0, se determina el valor del condensador de la última etapa

Se realiza el mismo procedimiento para los condensadores de las etapas anteriores con la consideración de,[17], [18].

5. SIMULACIÓN DE LAS SEÑALES RECIBIDAS POR EL SISTEMA
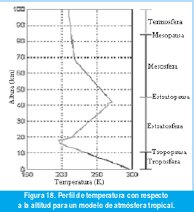
Se inicia generando un vector que aproxima el perfil de temperatura en función de la altura para un modelo de atmósfera tropical, que resulta ser el más adecuado a las condiciones colombianas. Se identifican además las capas atmosféricas. La figura 18 muestra los resultados.
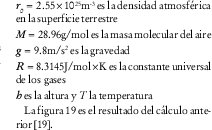
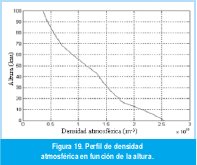
Utilizando este perfil de temperatura se halla el perfil de densidad atmosférica en función de la altura. La ecuación que describe la densidad atmosférica es:

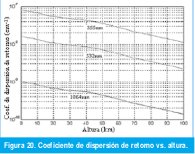
Para la mezcla de gases atmosféricos que ocurre en alturas inferiores a 100km, se ha indicado que la sección de cruce de la dispersión de retorno Rayleigh (a nivel molecular) es:

de manera que el coeficiente de dispersión de retorno es: [9].

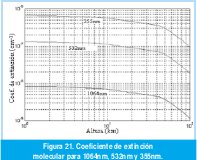
El coeficiente de extinción molecular es determinado por medio de la siguiente ecuación

Las figuras siguientes muestran los perfiles de los coeficientes de dispersión de retorno y extinción Rayleigh respectivamente [5].
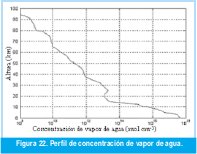
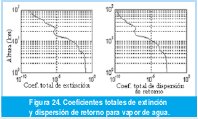
Para la determinación de los coeficientes respectivos a la dispersión Mie (partículas / aerosoles), se traza un perfil de nivel de concentración de vapor de agua.
La ecuación que describe el coeficiente de extinción en la superficie terrestre (que depende de la visibilidad) es [9]

donde


Con las ecuaciones anteriores y teniendo en cuenta el perfil de concentración

donde Np(R=0) es el nivel de concentración en la superficie terrestre.
El coeficiente de dispersión de retorno para partículas en función de la altura está descrito por:

donde k
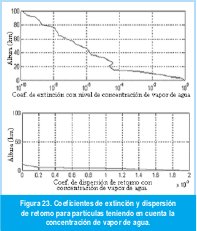
La suma total de coeficientes (Rayleigh y Mie) es [5].

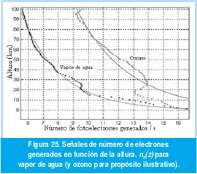
La señal ne(R) de electrones generados en el período de integración del detector, que surgen como consecuencia de la dispersión de retorno elástica de la radiación láser en el rango R se determina por la ecuación

donde se ha introducido el parámetro del sistema LIDAR, también llamado en ocasiones constante instrumental

y el factor de eficiencia del detector ξD(λL), que para un fotomultiplicador es

donde η(λL) representa la eficiencia cuántica del fotocátodo en λL, ξ es la probabilidad de que un electrón liberado desde el fotocátodo alcance el primer dinodo y G es la ganancia dinódica (o interdinódica) del PMT [9].
Para calcular la eficiencia cuántica del tubo fotomultiplicador en la longitud de onda adecuada η(λL)

donde SK es la sensibilidad del cátodo (unidades en mA/W).
La figura 25 ilustra el resultado de la ecuación 41. Debe anotarse que en la constante instrumental no se ha tenido en cuenta el factor de cruce (F(R) = 1), con lo cual la complejidad se reduce considerablemente [18].
Para hallar la corriente en la salida del PMT se deben tener en cuenta las siguientes consideraciones:
- Una distancia de 100km se recorre en aproximadamente 333.33µs
- 1C = 6.25×1018 fotoelectrones.
- Q = I× t
La ecuación para determinar dicha corriente es

donde Qe0 es la energía del haz en la salida del expansor, q es la carga del electrón y µ es la ganancia del PMT.
Finalmente, al tener en cuenta el factor de cruce hallado anteriormente en la ecuación 42, que determina la constante instrumental, se puede hallar la señal sobre el ánodo (salida) en el fotomultiplicador (ecuación 45). El resultado se muestra en la figura 26.
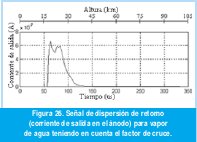
Puede verse que el factor de cruce establecido permite una detección progresiva de la señal a partir de 52µs (aproximadamente 17km) [5].
6. CONCLUSIONES
La detección activa remota es una herramienta importante para estudiar los procesos atmosféricos porque ofrece muchas ventajas sobre los sistemas de detección pasiva remota. Una de las principales es la alta resolución vertical que se puede lograr.
Un sistema LIDAR típico usa un láser pulsado o de onda continua para propagar un haz a través de la atmósfera. El haz se expande para minimizar su divergencia, y se dirige hacia la atmósfera por medio de un espejo inclinado. A medida que viaja a través de la atmósfera, es reflejado o dispersado por objetos sólidos, constituyentes atmosféricos (principalmente nitrógeno) y aerosoles. La luz dispersada se recolecta por el campo de visión de un telescopio y es redirigida hacia el detector por una fibra óptica o cualquier otro mecanismo. La cantidad de luz recibida se mide en función del tiempo (o distancia) usando fotodetectores con la sensibilidad adecuada. La señal proveniente del detector se analiza con la ayuda de electrónica de alta velocidad para obtener la información del objetivo en sí mismo o de la atmósfera entre el objetivo y el receptor.
La ecuación LIDAR que se emplea para calcular teóricamente la señal de retorno para un sistema de objetivos determina la potencia recibida por el dispositivo detector en función de la altura, la potencia inicial del haz emitido hacia la atmósfera, las propiedades ópticas y atmosféricas hacia las que se dirige el haz por medio de la ley de Beer Lambert y las características de los instrumentos utilizados en la transmisión y recepción.
El factor de forma o cruce es una característica de mucha importancia en el sistema LIDAR. Lo determina el conjunto láser transmisor / telescopio receptor. Proporciona la fracción del haz que se cruza con el campo visual del telescopio, y por lo tanto determina la porción de luz que se enfoca sobre el dispositivo detector. En este factor se tienen en cuenta características como el diámetro y la divergencia del haz, la apertura, la distancia focal y el campo visual del telescopio, el ángulo de inclinación entre los ejes ópticos del haz y el telescopio y la separación entre los mismos.
Las simulaciones realizadas permiten aproximar las condiciones atmosféricas de temperatura y concentración de ciertos constituyentes en función de la altura y de acuerdo a estas, al considerarse las características instrumentales, las señales recibidas por un sistema LIDAR.
Un LIDAR es un sistema sofisticado al compararse con los sistemas comunes para realizar estudios atmosféricos, sin embargo, esto se compensa con la mayor profundidad que se obtiene en los estudios que permite realizar.
7. REFERENCIAS BIBLIOGRÁFICAS
[1] KILLINGER, Dennis. CHURNSIDE, James. ROTH, Laurence. Handbook of optics. Vol 1. Chapter 44. Atmospheric Optics. p.44.2,44.4-44.21
[2] TARDIF, Robert. Boundary Layer Aerosol backscattering and its relationship to relative humidity from a combined Raman elastic backscattering LIDAR. Project for ATOC 5235 Remote Sensing of the atmosphere and oceans. Lidar remote sensing. p.4.2002. http://www.rap.ucar.edu/staff/tardif/CUprojects/ATOC5235/
[3] WILCOX, William E. Development and experimental verification of a high resolution, tunable LIDAR computer simulation model for atmospheric laser remote sensing. p.15-17,18-32. 1995
[4] ALPERS. EIXMANN. HÖFFNER. KÖPNICK. SCHNEIDER,VON ZAHN. The Rayleigh/Mie/Raman LIDAR at IAP Kühlungsborn, Germany (54°N, 12°E). http://www.iapkborn.de/optik/aer_trop/_vti_cnf/aer_trop_d.htm
[5] BLANC, Carlos. CUESTA, Juan. GIMENEZ, Pablo. PEREYRA,Gonzalo. Sistema de control electrónico del LIDAR MWLS.Cap. 5. p. 44-47, 76-82. 2001.
[6] PHILIPS SEMICONDUCTORS. 1N4148 1N4448 High speed diodes datasheet. http://www.semiconductors.philips.com.
[7] NATIONAL SEMICONDUCTOR. LMH6702 datasheet. www.national.com
[8] BURR - BROWN. OPA648 datasheet. http://www.datasheetarchive.com
[9] MEASURES, Raymond. Laser Remote Sensing. Fundamentals and applications. Ch. 6. p. 205-219. Ch. 5. p. 173 - 174. Ch 1. 27-34. Ch. 7. p. 255-265. Ch.2. p. 42. Ch. 4. p. 142-145. Ch. 8. p. 296-300. 1992. Ed. Krieger Publishing Company.
[10] SPIRICON INC. Laser Beam Profiling. Chapter 2. Theory of Operation. www.spiricon.com/pdf/ch2a.pdf
[11] GIGAHERTZ-OPTIK. Properties and concepts of light and color. p. 4-8. http://www.gigahertz-optik.de/pdf/catalogue/Tutorials.pdf
[12] NEWPORT CORP. High Energy Nd:YAG Laser Mirrors. www.newport.com/High-Energy_NdYAG_e3534.pdf
[13] MELLES GRIOT. Beam Samplers. www.mellesgriot.com
[14] LASER COMPONENTS Ltd. Diffractive Optics from Holo /Or.www.lasercomponents.com/pdf/holoor/diff_opt.pdf
[15] LAMBDA / TEN OPTIS. Laser Beam Expanders. http://www.mcphersoninc.com/lambdaten/laserbeamexpanders.htm
[16] MEADE INSTRUMENTS CORPORATION. 8", 10", 12", 14", 16" LX200GPS Schmidt-Cassegrain Telescopes. 7" LX200GPS Maksutov-Cassegrain Telescope with Autostar II Hand Controller. Instruction Manual. www.meade.com
[17] HAMAMATSU PHOTONICS. Low Light Level in the NIR. NIR photomultiplier tube R5509-42. http://www.hamamatsu.com
[18] HAMAMATSU PHOTONICS. PMT Handbook. Ch. 1. p.12-18. Ch. 3. p64. Ch 7. p. 158-187. Ch. 3. p. 35. 1996.
[19] BENDER, Jon, WEST, Alan. Atmospheric Absorption of Muons from Cosmic Rays. http://www.mountmichaelhs.com/crop/papers/atmosabsorp.htm
Héctor Hernán González Becerra
Ingeniero electrónico, Universidad Distrital Francisco José de Caldas. Presentó su trabajo de grado, la cual obtuvo calificación de meritoria en el Diseño y Conceptualización teórica de un sistema LIDAR para mediciones atmosféricas. Se desempeñó como asesor de soporte técnico, soporte de segundo nivel, soporte para el convenio REDP y team leader en SITEL de Colombia (internet -ETB) de 2002 a 2003. Posteriormente trabajó como soporte de segundo nivel en Contact Center Americas para internet - ETB de 2003 a 2004. También se desempeñó como torre de control ADSL en SITEL de Colombia para internet - TELECOM de 2004 a 2005. Participó como contratista para el desarrollo de sistemas electrónicos de control y medición de un sistema LIDAR en el Centro Internacional de Física durante 2003. Actualmente es analista de desa- rrollo en Contact Center Ameritas. hectgonb@etb.net.co
Jaime Humberto Angulo Chavarro
Ingeniero Electrónico, Especialista en Bioingeniería. Magister en Teleinformática de la Universidad Distrital Francisco José de Caldas. Docente desde 1977 en instituciones como: Escuela Colombiana de Carreras Industriales, Universidad Antonio Nariño, Uni- versidad Santo Tomas, Universidad de La Salle, Universidad Inca y Universidad Distrital. También ha ejercido diversos cargos en instituciones del área hospitalaria y como coordinador de las especializaciones en Teleinformática, Telecomunicaciones móviles, Bioingeniería y de la Maestría en Teleinformática en la Universidad Distrital. Actualmente se desempeña como profesor en el área de Bioingeniería en la Universidad Distrital, y es Codirector y Coinvestigador del Grupo de Investigación en Telemedicina GITEM. jangulo@udistrital.edu.co
Creation date:
License
![]()
From the edition of the V23N3 of year 2018 forward, the Creative Commons License "Attribution-Non-Commercial - No Derivative Works " is changed to the following:
Attribution - Non-Commercial - Share the same: this license allows others to distribute, remix, retouch, and create from your work in a non-commercial way, as long as they give you credit and license their new creations under the same conditions.

2.jpg)



