DOI:
https://doi.org/10.14483/23448393.2852Published:
2008-11-30Issue:
Vol. 8 No. 1 (2003): January - JuneSection:
Science, research, academia and developmentDiseño y construcción económica de sensores, un aporte a la industria y a la academia
Sensor's economical design and construction contribution to the industry and the academy
Keywords:
Instrumentación, sensores análogos, sensores ópticos, sensores de nivel. (es).Downloads
References
PALLAS A. R. "Sensores y Acondicionadores de Señal". Tercera edición. Barcelona España, Marcombo S.A. 1998
COUGLIN R. F. "Amplificadores operacionales y circuitos integrados lineales". México, Prentice-Hall Hispanoamérica S.A. 1993
CREUS A. "Instrumentación industrial". Alfaomega-Marcombo
MARSTON R. M. "Circuitos de optoelectrónica". Ediciones Ceac
http://www.cucei.udg.mx/~eburiel/practicas/practica_2.html
http://quidel.inele.ufro.cl/~jhuircan/PDF_CTOSII/AmpOpApp.pdf
CHETELAT O. "Sustentation magnetique, synthèse d'un régulateur". En: http://iawww.epfl.ch/laboratoies/levitaion/ levitaionFrame.html
How to Cite
APA
ACM
ACS
ABNT
Chicago
Harvard
IEEE
MLA
Turabian
Vancouver
Download Citation
Ciencia, Investigación, Academia y Desarrollo
Ingeniería, 2003-00-00 vol:8 nro:1 pág:50-57
Diseño y construcción económica de sensores, un aporte a la industria y a la academia
Sensor's economical design and construction contribution to the industry and the academy
Danilo Rairán Antolines
Director del Grupo de Investigación en Levitación Magnética.
Yovanny Olarte
Laboratista para el programa de Tecnología en Electricidad.
César Peñuela
Auxiliar de ingeniería en Roy Alpha.
Resumen
En este artículo se presenta el desarrollo de cuatro sensores análogos para la conversión de nivel, posición y temperatura a voltaje. Cada uno de estos dispositivos tiene dos finalidades fundamentales; por un lado colaborar en el adelanto y cumplimiento de algunos objetivos del grupo de investigación en levitación magnética, y por otro, presentar a la industria colombiana alternativas para la implementación económica de dispositivos para el monitoreo de procesos. Al final del artículo, y como resultado importante de la experiencia en el diseño y construcción de los dispositivos, se propone una metodología para el desarrollo de estos o de similares, siempre que la comunidad académica o industrial los requiera.
Palabras Clave: Instrumentación, sensores análogos, sensores ópticos, sensores de nivel.
Abstract
In this paper we present the construction process of four analog sensors used in converting level, position, and temperature to voltage. Each device serves two primary purposes: first, to promote the magnetic levitation research group's goals, and secondly, to offer the Colombian industrial community alternatives for economical implementation of process monitoring devices. In the article's conclusion, as an important result of the experience acquired designing and building these devices a methodology is proposed for developing these or similar devices as needed by the academic or industrial community.
Key Words: Instrumentation, analog sensor, optic sensor, level sensor.
INTRODUCCIÓN
Una labor de la Universidad, entre otras, es el acercarse a la industria para ofrecerle soluciones tecnológicas que la hacen más competitiva y eficiente. Ha sido esta la motivación fundamental al interior del grupo de investigación en levitación magnética para presentar el desarrollo de sensores análogos para la medición de algunas de las variables físicas corrientes, como es la temperatura, posición y nivel. Se construyeron cuatro sensores con un criterio importante, se trata de la absoluta sencillez y lo económico que debe resultar la implementación de cada uno de ellos, sin dejar de lado, por supuesto, la rigurosidad técnica que el diseño de los mismos amerita.
A lo largo del artículo se verá cómo es importante el estudio y análisis de la variable física a medir, luego el estudio de alternativas, el desarrollo del algunos prototipos iniciales, la simulación, la construcción y, por último, el patronamiento de los sensores. Se construyó uno de temperatura, por medio de un termistor; otro de posición, mediante un dispositivo óptico; otro de posición mediante la variación de reluctancia en un circuito magnético y, finalmente, uno capacitivo, útil para la medición de la altura del agua en un tanque. Como resultado a resaltar, al final del artículo se presenta una propuesta de metodología para la construcción de sensores similares, la cual se espera sea probada, discutida y mejorada por los interesados en el tema.
DESARROLLO
Ahora se especificará la manera en que se construyó cada sensor, comentando, en cada caso, los problemas relevantes y las soluciones que se dieron.
I. SENSOR DE TEMPERATURA
Se decidió usar el termistor ntc por la curva experimental resistencia vs temperatura que presenta, la cual se muestra en la figura 1. Esta tiene menos alinealidades que los demás opciones económicas presentes en el mercado.
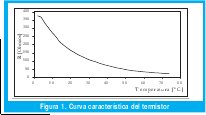
Como se observa, el termistor presenta un comportamiento no lineal, por tal razón se debe emplear un método de linealización con el fin de conseguir una salida proporcional a la temperatura y que esté entre 0 y 10 V. Éste consistió en agregar una resistencia "R" en paralelo al termistor [1]; para hallar el valor adecuado se hizo un programa en MatLab, en el que se emplearon los valores de la curva en la figura 1. Después, se colocó la resistencia calculada (50Ω) en paralelo al termistor y se obtuvo nuevamente la curva experimental, con el fin de confirmar la linealidad del transductor.
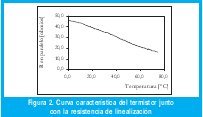
Como se observa en la figura 2, luego de agregar la resistencia, se logra conseguir un comportamiento aproximadamente lineal; sin embargo, se pierde sensibilidad, de 350Ω se pasa a cerca de 50Ω.
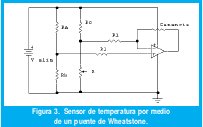
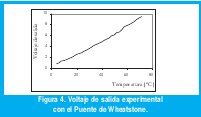
Para la construcción del transductor se emplearon tres topologías diferentes: un divisor resistivo, la utilización de un amplificador operacional y, finalmente, un puente de Wheatstone. Para la primera topología y luego de realizar las pruebas experimentales se encontró que el consumo de corriente era elevado, lo que hacía que el termistor se auto calentara, generándose así errores en la medida. La segunda opción fue utilizar un amplificador operacional como elemento conversor de temperatura a voltaje [2]. Finalmente, para ajustar con facilidad el valor de ganancia del sensor se recurrió a utilizar un puente de Wheatstone [1]. El funcionamiento se basó en la variación del voltaje de entrada entre los terminales del operacional, la cual depende del valor de resistencia en el termistor, y por lo tanto de la temperatura.
La figura 4 indica que la señal de salida se comporta en forma aproximadamente lineal, con una salida que está entre 0 y 10 V, como se esperaba.
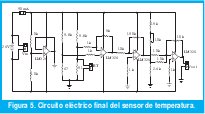
Finalmente se desarrolló el circuito eléctrico para construir el modelo definitivo del transductor, en éste ya se involucran la etapa de linealización y el ajuste de ganancia.
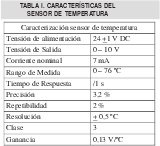
Después de la construcción se realizó el patronamiento, los resultados obtenidos en esta etapa se muestran a continuación:
II. SENSOR CAPACITIVO PARA NIVEL
Su aplicación es la medición del nivel de un líquido, en este caso agua. Inicialmente se hizo una consulta acerca del funcionamiento y las posibles formas de construirlo, entre ellas estuvo el emplear la variación de capacidad de un condensador, por esta razón se construyó un condensador de placas paralelas en el que se emplearía al agua como material dieléctrico.
Para llegar a la construcción final de este sensor se analizó el comportamiento eléctrico del condensador construido y se fabricó un tanque de 50 cm de alto. El condensador está constituido por placas de cobre de 2 cm de ancho, separadas inicialmente 2 mm; estas se colocaron dentro del tanque y se lleno en su totalidad, agregando agua cada centímetro para obtener la curva de reactancia y admitancia, las cuales describen el comportamiento del condensador.

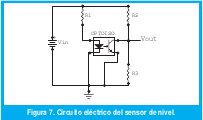
En la figura 6 se puede ver cómo la admitancia se comporta linealmente, por esta razón se decidió emplearla para realizar los cálculos teóricos que definieron los parámetros del sensor. Al igual que en la construcción del sensor de temperatura, se desarrollaron programas en MatLab que permitieron calcular las características deseadas. El primer prototipo del circuito eléctrico desarrollado se muestra en la figura 7.
La distancia de separación de las placas en el primer prototipo fue de 2 mm, encontrando con esto errores en la medida, inestabilidad y excesivo tiempo de respuesta. Los errores en la medida son causados por la presencia de sólidos o líquidos conductores suspendidos en el agua, con lo que puede resultar hasta un 3% de error [3]; por la que se decidió ampliar la distancia de separación entre placas a 3 mm, con lo que se solucionaron los problemas presentados. Se continuó con la construcción de los circuitos impresos finales y el patronamiento del sensor llegando a la construcción del modelo final del sensor, el cual arrojó la curva de voltaje de salida que se encuentra en la figura 8.

III. SENSOR ÓPTICO
Este sensor se basa en el uso de dispositivos emisores de luz conocidos comúnmente como LED (Light Emision Diode) y elementos receptores o detectores luminosos, comercialmente conocidos como fotodiodos o fototransistores. La sensibilidad de un fototransistor es generalmente cien veces mayor que la de un fotodiodo, pero su frecuencia operativa máxima útil es proporcionalmente inferior a la del fotodiodo [4] por lo que se decidió por trabajar con este último. Dos características a tener en cuenta en el circuito usado son: la corriente de salida es controlada por la corriente la entrada (si la intensidad que circula por el led es mayor, habrá aumento en la distancia de detección); la segunda es que la entrada está aislada eléctricamente del circuito de salida, esto se debe a que la entrada controla la salida mediante una conexión óptica.
En este caso fue necesario hacer un estudio del comportamiento que presentaría el optoacoplador, así como se hizo con el termistor, por lo que se obtuvo la curva característica del mismo.

En la figura 9 se observa el circuito que se empleó para obtener la curva característica del transductor [4], este deja ver el funcionamiento de un optoacoplador. R1 se emplea como limitador de corriente, con el fin de proteger el diodo emisor de luz, R2 se utiliza para polarizar el transistor y R3 para medir el voltaje de salida.
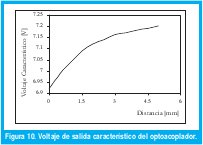
La figura 10 muestra la curva que describe el comportamiento del voltaje de salida del circuito optoacoplador, la cual es una señal exponencial creciente que se asemeja con la carga de un condensador. Para linealizarla se utilizó un circuito conocido como amplificador logarítmico [5]; posteriormente esta señal tendrá que ser acondicionada, con el fin de obtener el voltaje de salida en el rango deseado.
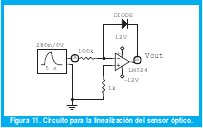
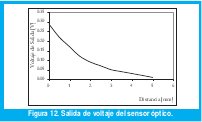
Si al circuito de la figura 11 se aplica un voltaje de entrada exponencial decreciente, la salida será lineal. Por tal motivo fue necesario realizar un preacondicionamiento a la señal. En la figura 12 se observa la señal de voltaje del transductor óptico después de la etapa de preacondicionamiento. La ecuación que describe el comportamiento característico del diodo es:

Donde: Is = corriente de saturación inversa [6], q = carga del electrón, VD = voltaje del diodo, K = constante de Boltzman (1.38 x 10-23 joule/ºK), T = temperatura absoluta en grados kelvin. Usualmente KT/q ≈ 26 mV a 25 ºC e Is = 50 µA (para un diodo 1N4004) [6].
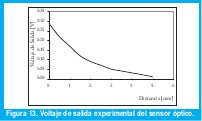
La figura 13 muestra la señal de voltaje que fue medido sobre el diodo del circuito de linealización. Como se observa, los valores de voltaje de la curva de salida son bastante pequeños pero aproximadamente lineales, por esta razón fue necesario amplificar esta señal para conseguir el rango deseado.
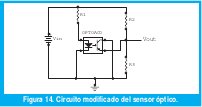
A pesar de conseguir la linealidad y el rango de salida, se presentó dificultad con el tiempo de respuesta, el cual osciló entre 800 ms y 900 ms, que es muy grande para ser un dispositivo óptico, por otro lado, la señal presentó contaminación de ruido de 1 V aproximadamente, esto genera errores en la medida, lo que hace que el sensor pierda precisión y confiabilidad. Por estas razones se decidió realizar otro montaje, el cual se analiza a continuación. Para iniciar es importante tener en cuenta que el fototransistor de un optoacoplador se puede polarizar como un transistor con emisor a tierra, como se hizo anteriormente, o polarizarlo como se muestra en la figura 14 [4].
La curva obtenida con el circuito de la figura 14 muestra un comportamiento lineal, como se ve en la figura 15, por lo cual se asumió como montaje para el sensor.

Todas las mediciones hasta ahora mostradas se realizaron en un ambiente con luz fluorescente. Al garantizarle un medio con una amplia intensidad lumínica incandescente se presentó una distancia de detección, inclusive hasta 2 cm, manteniendo aún su linealidad. Al ver que esta intensidad produce variaciones en el voltaje de salida del sensor, se realizó una prueba que describe este comportamiento (voltaje de salida vs intensidad lumínica), la cual se muestra a continuación.
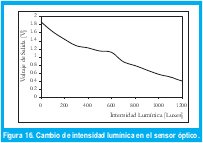
Las mediciones se tomaron con un objeto a 3 mm del sensor, dejando fijo éste y variando la intensidad lumínica. Como se puede analizar, existe una proporcionalidad entre la intensidad de luz y el voltaje de salida, por lo que se puede pensar que al adicionarle un acondicionamiento de señal adecuado, puede ser utilizado como medidor de intensidad de luz (Luxómetro), y así ampliar sus posibles aplicaciones.
Además de esta prueba realizada al sensor óptico se hizo una denominada prueba de colores, en donde el objeto a detectar fue una hoja de diferente color y algunas de diferente material, para así encontrar un curva característica con cada cambio y observar cómo afecta esto al sensor, resultando una variación considerable, por lo que es importante ajustar la ganancia del sensor dependiendo del material a medir. Finalmente se construyó el circuito definitivo, como muestra la figura a continuación.
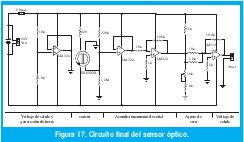
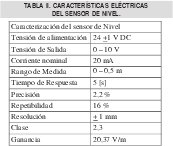
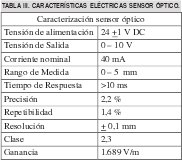
La figura 17 muestra el circuito final del sensor óptico, en ella se observa el optoacoplador, seguidamente los amplificadores operacionales, con los cuales se acondiciona la señal emitida por el circuito óptico y se obtiene la ganancia final. Para el patronamiento se presentan los parámetros que caracterizan el comportamiento y precisión del sensor en la tabla III.
IV. SENSOR INDUCTIVO
El principio de funcionamiento de este sensor se basa en la variación de inductancia, y por ende de las características electromagnéticas y geométricas del mismo. Algunas formas de variación empleadas para realizar mediciones o detecciones con este sistema son: variación del número de espiras de la bobina [1], desplazamiento del núcleo y, cambio de reluctancia debido al cambio del entrehierro. En este caso se utilizó el cambio de reluctancia, ya que permite lograr la finalidad para la cual se construyó este sensor, es decir, medir la posición, sin contacto [1].
El cambio de inductancia debido a la variación de reluctancia se define por medio de la ecuación:

En la ecuación 2 "L" es la inductancia, "N" el número de vueltas y "ℜ " la reluctancia. Para lograr las variaciones de reluctancia se debe construir un transformador convencional con dos devanados, en el cual el núcleo debe ser de un material ferromagnético, además, uno de los extremos del núcleo debe ser móvil para lograr los cambios de reluctancia debido a la variación del entrehierro. Esta movilidad es la que permite detectar la posición de un objeto determinado.
Una de las principales ventajas de estos sensores, es que les afecta poco la humedad ambiental y otros contaminantes como el polvo y partículas sólidas que se encuentren suspendidas en el aire, lo que es de gran utilidad en ámbitos industriales. El uso de una inductancia variable en la transducción presenta inconvenientes debido a que los campos magnéticos externos afectan la inductancia, por lo que puede ser necesario emplear un apantallamiento magnético para que los cambios presentados sean debidos únicamente al fenómeno a detectar [1].
Para realizar su modelo fue necesario definir el núcleo que se usaría, igualmente fue importante tener en cuenta la forma y disposición de las bobinas. Se empleó un núcleo de ferrita, la cual es una aleación de materiales ferromagnéticos y por sus características físicas presenta alta permeabilidad, ésta indica que es mucho más fácil hacer circular campo magnético por este material, que lo que se haría por el aire, de esta manera se logra aprovechar al máximo el flujo magnético, que finalmente es utilizado para la detección.
Después de tener claramente definida la forma de las bobinas, se efectuaron algoritmos que describieran el comportamiento eléctrico de las mismas, teniendo en cuenta la mayor cantidad de variables, para así tener un valor más aproximado a la realidad. Se realizaron programas en MatLab para calcular la cantidad de alambre necesario para la construcción de las bobinas, en este se tuvo en cuenta el calibre del conductor y la resistencia del mismo, en otro algoritmo se calculó la reluctancia, teniendo en cuenta la reluctancia del circuito, finalmente se diseño un programa en el que se calculó la corriente del devanado primario, el flujo magnético, y el voltaje inducido o de salida.
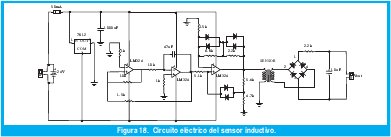
Luego del modelamiento y análisis, se construyó el circuito eléctrico que se muestra a continuación, del que se tomó la curva característica.
Finalmente, después de realizar la construcción del sensor se tomaron datos de voltaje de salida contra distancia para graficarlos posteriormente; obteniéndose como resultado la señal mostrada en la figura 19.

Como se ve, la señal de salida de voltaje muestra un comportamiento no lineal, por esta razón, fue necesario analizar otra topología de construcción que permitiera cumplir con el objetivo de linealidad del sensor de posición inductivo. Consultando los métodos de linealización se encontró que las variaciones de inductancia que presenta una bobina tienen un comportamiento exponencial [7]. Para verificar el comportamiento exponencial que tiene la bobina, se tomaron datos experimentales para ser graficados y analizados posteriormente, la figura que se ve a continuación muestra este comportamiento.

La figura 20 permite ver el comportamiento de la bobina del sensor. Como se esperaba, la señal del voltaje de salida tiene un comportamiento exponencial decreciente, que puede linealizarse de la misma de la misma forma como se linealizó el sensor óptico, es decir, utilizando un operacional configurado como amplificador logarítmico.
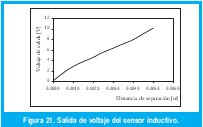
La figura 21 muestra la señal que describe el comportamiento del voltaje de salida que presentó el sensor inductivo, después de hacer las correcciones necesarias. Como se observa, la salida de voltaje es lineal y cumple con los parámetros establecidos para los otros sensores analizados anteriormente, además de la linealidad que caracteriza al sensor, el rango de voltaje también es el requerido.
Después de obtener el voltaje de salida deseado y corregir los inconvenientes presentados con el prototipo anterior, se realizó el montaje del circuito eléctrico final, en el que se incluyen las etapas de acondicionamiento de señal y linealización de la misma.
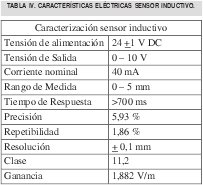
En la tabla IV se presentan las características de funcionamiento que presentó el sensor inductivo después de realizar el patronamiento del mismo.

V. PROPUESTA DE METODOLOGÍA
Cercano al momento de conclusión de este artículo se recopila en una serie de pasos una metodología de diseño; esta se constituye en la secuencia con la que, se propone, se debe construir cualquier sensor con características y propósitos similares a los ya expuestos. Nace de la experiencia en la fabricación de los sensores, y por lo tanto, puede ser discutida, probada y refutada creando otras posibles o, en el mejor de los casos, mejorando y la complementando la aquí dada, como esperan los autores.
Inicialmente se define, claramente, la variable física que se quiere medir y la forma que tendrá la señal de salida a obtener, siendo las más comunes el voltaje y corriente. A continuación se hace la consulta y recopilación de información acerca del funcionamiento y posibles formas constructivas que se puedan emplear. Se continua con el estudio del comportamiento que presenta el transductor; dependiendo de la curva que se obtenga será necesario emplear un sistema de linealización o no. Posteriormente, se realizan los cálculos teóricos que definen el comportamiento del sensor; con estos, se grafican las curvas que indican la conducta del mismo, ésta etapa se denomina modelamiento matemático, en la misma se obtienen las ecuaciones de los transductores y la función de transferencia del circuito eléctrico o ganancia.
Una vez que se ha obtenido el modelo matemático del sensor, y de conocer las curvas que describen su comportamiento, se construyen prototipos experimentales sobre los que se hace un análisis de resultados. En esta etapa se observan los problemas que se puedan presentar y se generan las posibles soluciones a los mismos; en otros casos es necesario analizar otras formas constructivas que ofrezcan mejores resultados, en cuyo caso, es necesario realizar nuevamente los cálculos teóricos que ratifiquen el funcionamiento deseado, ahora con una nueva topología.
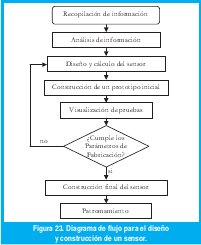
Luego de construir circuitos y verificar que los inconvenientes que se presentaron fueron corregidos, se continúa con la construcción final del circuito impreso que conforma el sensor (etapa de linealización, acondicionamiento de señal, etc.), con estos se construye el modelo definitivo del sensor, de este se obtienen nuevamente las curvas que confirman que se han cumplido los parámetros deseados que se dieron en la etapa de diseño. Finalmente, se debe hacer el patronamiento del dispositivo, en este se obtienen datos que infor man las características de confiabilidad del instrumento y las condiciones eléctricas mínimas para su adecuado funcionamiento. Todo este proceso se ve resumido en la figura 23 donde se da el diagrama de flujo para el diseño de un sensor análogo.
CONCLUSIONES
Antes de decidir cual es la configuración final de un sensor, se deben hacer varios prototipos que permitan corregir errores, los cuales se presentan, casi siempre, por no tener en cuenta la influencia de una variable física dentro del programa de cálculo, o por la dificultad de llevar al laboratorio alguna apreciación teórica.
Para la caracterización de un sensor, no basta con conocer su ganancia o sensibilidad, sino que se deben medir muchos otros parámetros que permitan conocer cuáles son los límites de funcionamiento del dispositivo, así como los puntos y condiciones físicas en que este funciona mejor. Algunos de los parámetros son: fidelidad, tiempo de respuesta, entre otros.
La construcción de un sensor es un proceso iterativo que intercala el cálculo teórico con la fabricación de prototipos, de manera que el cálculo inicial conlleva a un dispositivo inicial, este a su vez mejora y da luces con respecto al proceso de simulación que siga y así sucesivamente hasta un punto en que se cumplan con las características de diseño. No se recomienda el diseño de un sensor a partir únicamente de simulaciones, como tampoco solamente experimental. La combinación de estas dos es la que conlleva, en todos los casos probados, a un mejor resultado.
La medición de nivel se puede realizar teniendo en cuenta las características eléctricas del líquido a medir, como se mencionó anteriormente, el sensor desarrollado permite la medición del nivel de agua, si ésta es limpia y no posee partículas en suspensión el comportamiento y fiabilidad del mismo serán mejores, lo que garantiza mayor precisión en la medida. Fluidos viscosos como aceites no permiten que el sensor funcione debidamente por consiguiente los resultados de la medida serán erróneos. Por su construcción sencilla estos sensores son de fácil mantenimiento, lo cual es una característica importante para un sensor que puede trabajar en un ambiente industrial.
El sensor inductivo que se diseño y desarrollo además de emplearse para la medida de posición puede ser empleado para la detección de diferentes materiales, especialmente si estos presentan características ferromagnéticas. El objeto a detectar, en lo posible debe cubrir la mayor parte del área superior del cilindro del sensor, con el fin de evitar flujos magnéticos dispersos que puedan afectar la medida y las características de fiabilidad.
REFERENCIAS BIBLIOGRÁFICAS
[1] PALLAS A. R. "Sensores y Acondicionadores de Señal". Tercera edición. Barcelona España, Marcombo S.A. 1998
[2] COUGLIN R. F. "Amplificadores operacionales y circuitos integrados lineales". México, Prentice-Hall Hispanoamérica S.A. 1993
[3] CREUS A. "Instrumentación industrial". Alfaomega-Marcombo
[4] MARSTON R. M. "Circuitos de optoelectrónica". Ediciones Ceac
[5] http://www.cucei.udg.mx/~eburiel/practicas/practica_2.html
[6] http://quidel.inele.ufro.cl/~jhuircan/PDF_CTOSII/AmpOpApp.pdf
[7] CHETELAT O. "Sustentation magnetique, synthèse d'un régulateur". En: http://iawww.epfl.ch/laboratoies/levitaion/ levitaionFrame.html
Danilo Rairán Antolines
Ingeniero Electricista de la Universidad Nacional de Colombia y Magíster en Automatización Industrial de la misma. Docente de Tecnología en Electricidad de la Universidad Distrital a partir de 1996. Director del grupo de investigación en Levitación Magnética. drairan@udistrital.edu.co
Yovanny Olarte Novoa
Tecnólogo Electricista, egresado de la Facultad Tecnológica de la Universidad Distrital. Actualmente es laboratorista para el programa de tecnología en electricidad. Estudiante de Ingeniería en distribución y redes eléctricas. onyx_yova@hotmail.com
César Peñuela Méndez
Tecnólogo Electricista, egresado de la Facultad Tecnológica de la Universidad Distrital. Actualmente se desempeña como auxiliar de Ingeniería en Roy Alpha S.A. Estudiante de Ingeniería en distribución y redes eléctricas. cepenuela@royalpha.com
Creation date:
License
![]()
From the edition of the V23N3 of year 2018 forward, the Creative Commons License "Attribution-Non-Commercial - No Derivative Works " is changed to the following:
Attribution - Non-Commercial - Share the same: this license allows others to distribute, remix, retouch, and create from your work in a non-commercial way, as long as they give you credit and license their new creations under the same conditions.

2.jpg)



