DOI:
https://doi.org/10.14483/23448393.1886Published:
2003-11-30Issue:
Vol. 9 No. 2 (2004): July - DecemberSection:
Science, research, academia and developmentSistema de detección y reconocimiento de falla en un tipo de tarjeta electrónica de celulares motorola
Detection and pattern recognition of failure systems in motorola cellular telephones
Keywords:
Visión, Matemática Morfológica, Corrosión, Celulares, Reconocimiento de patrones (es).Downloads
References
MINCOMUNICACIONES-ETB, «Prospecto de Colocación de Acciones Privilegiadas del Programa Acciones ETB- Colombia», Febrero 2003.
Publicado por STANDARD & POOR'S, «Perspectivas de la industria de las telecomunicaciones de América Latina para el 2004», División de The McGraw-Hill Companies, Inc., enero de 2004
MARR,D; HILDRETH, E.: «Theory of Edge Detection», Proc. Roy. Soc. London, vol. B 207: (187-217), 1980.
KUSTURI R. y JAIN R., «Computer Vision: Advances & Applications». IEEE Computer Society Press, 1991.
BROWN M. ET AL, «Advances in Computational Stereo», IEEE Transactions on Pattern Analysis and Machine Intelligence, vol 25, N.8, 2003.
NOZAL, L. "Arquitectura para procesamiento de imágenes: criterios estructurales de diseño". Mundo electrónico. No. 236 Marzo 199 342-48.
GONZALES R. , WOODS R. "Digital Image Processing", Addison-Wesley Publish.Company, 1992.
DIAZ, A.. "Visión y procesamiento de imágenes para control de calidad". Proyecto de Investigación. Revista Universidad Eafit (Medellín) No. 103 Julio 1996.
MURPHEY Y., CHEN T., ZHANG J., ZHOU Y., «A Smart Machine Vision System for PCB Inspection»,. Department of Electrical and Computer Engineering University of Michigan-Dearborn. Noviembre, 2000.
LEE, D., "A computerized automatic inspection system for complex printed thick film patterns" , SPIEAppl. Electron .Imaging Syst. 143,1978.
HARA Y., H. Doi , K.Karasaki, T.lida, "A system for PCB automated inspection using fluorescent light", IEEE Trans. Pattern Anal. Mach. Intell. 10(1), 1988.
PRATT, W., "Image detection and registration, Digital Image Processing", pp.551-566;Wiley- Interscience, New York,1978.
AHMED M. .DARWISH Y, JAIN K., "A Rule Based Approach for Visual Pattern Inspection", IEEE Transactions on Pattern Analysis and Machine Intelligence, vol. 10,No 1,Enero 1988.
HOGUZ S., ONURAL L., " An automated system for design-rule based visual inspection of printed circuit boards", in Proceedings of the 1991 IEEE International Conference on Robotics and Automation, Sacremento, CA, Abril 1991.
ROSENFELD A. ,KAK A.," Digital Picture Processing" , Vol. I, Academic Press, Orlando, FL.
CASTLEMAN, K, "Digital Image Processing". Prentice Hall, 1996
SPRAGUE A., DONAHUE M., y ROKHLIN S., "A method for automatic inspection of Printed Circuit Boards", CVGIP:Image Understanding 54(3), 1991.
CANNY, J. "Computational Approach to Edge Detection", IEEE Transactions on Pattern Analysis and Machine Intelligence, vol. Pami-8,No. 6,Noviembre 1986.
DEKKER, M. «Mathematical morphology in image processing» .Edited by Edward Dougherty, Rochester Institute of technology.Rochester, New York. 1993
SERRA. J. "Image Analysis and Mathematical Morphology ". Academic Press, 1982.
DOUGHERTY E., " An Introduction to Morphological Image Processing", SPIE Optical Engeenering Press, 1992.
NATIONAL INSTRUMENTS, "IMAQ Vision concept manual", National Instruments Corporation. Octubre 2000
ROJAS A., DÍAZ S. «Sistema de detección de falla en un tipo de tarjeta electrónica de celulares tipo Motorola». Trabajo de Grado. Universidad Distrital, Facultad de Ingeniería, Agosto de 2004.
How to Cite
APA
ACM
ACS
ABNT
Chicago
Harvard
IEEE
MLA
Turabian
Vancouver
Download Citation
Ingeniería, 2004-00-00 vol:9 nro:2 pág:48-57
Sistema de detección y reconocimiento de falla en un tipo de tarjeta electrónica de celulares motorola
Detection and pattern recognition of failure systems in motorola cellular telephones
Alexander Rojas
Ingeniero Electrónico Universidad Distrital Francisco José de Caldas.
Sergio Díaz
Ingeniero Electrónico Universidad Distrital Francisco José de Caldas.
Alvaro Betancourt U.
Director Grupo de Investigación LAMIC, Universidad Distrital Francisco José de Caldas.
Resumen
El artículo describe un prototipo para la detec- ción y reconocimiento de corrosión en una tarjeta electrónica de celulares Motorola© modelo V120t, usando un sistema de visión artificial o asistida por computador. Se detecta la corrosión causada por exposición o contacto con agentes líquidos mediante la ionización acelerada por flujos de corriente. La corrosión conlleva a una degradación automática de las soldaduras y pistas internas de la tarjeta ocasionando múltiples fallas. Ante la ausencia de herramientas que permitan un análisis e inspección más detallada de la tarjeta, el daño muchas veces pasa desapercibido. Con el sistema desarrollado se contribuye a solucionar dicha problemática.
Palabras Clave:
Visión, Matemática Morfológica, Corrosión, Celulares, Reconocimiento de patrones.
Abstract
This paper describes a system for detection and pattern recognition of corrosion using the artificial vision computation in motorola cellular telephones. The corrosion produces an automatic degradation of internal joints of the circuit board causing multiple failures. Due to the absence of tools to permit the perfect analysis and inspection of the circuit board, the failure is not always detected. This developed system corrects this problem.
Key words:
Vision, Morfologic mathematica, corrosion, pattern recognition
I. INTRODUCCIÓN
La industria de la telefonía celular en Colombia como en América Latina ha tenido un gran desarrollo en la última década, haciendo que los teléfonos móviles sean hoy más que un lujo una necesidad. El número de usuarios de teléfonos celulares y de centros de servicio es cada vez mayor. Los centros de servicio de teléfonos móviles reciben, centenares de teléfonos para su reparación en razón a estar cubierta por la garantía que expide el fabricante [1],[2]. La inspección visual automática cobra gran importancia en la industria, debido a la necesidad de aplicar herramientas de análisis para la detección y corrección de fallas en los productos terminados. La inspección visual consiste en la verificación de ciertos parámetros técnicos en cuanto a la forma, el color, el acabado, entre otros. El artículo describe un prototipo para la detección y reconocimiento de corrosión en una tarjeta electrónica de celulares Motorola© modelo V120t, usando un sistema de visión artificial o asistida por computador y su organización es como sigue: en la segunda sección se describen los antecedentes, la problemática y la morfología matemática. En la sección III se lleva a cabo el diseño del sistema. En la sección IV se presenta la programación y los resultados y finalmente las conclusiones.
II. ANTECEDENTES Y METODOLOGIA
A. Antecedentes
Durante la década de los ochenta las técnicas de análisis de imágenes presentan un gran avance como consecuencia del número de aplicaciones y la madurez en el diseño de arquitecturas de computadores. Desarrollos teóricos siguen las pautas de Marr, línea marcada por el MIT (Massachussetts Institute of Technology). Las mayores contribuciones se centran en el desarrollo de algoritmos para la detección de características (bordes, líneas, texturas) que ayudan a definir lo que Marr denominó el esbozo primitivo, así como en el desarrollo de técnicas globales de segmentación de una imagen en regiones [3].
De especial significación son también los numerosos trabajos que utilizan las técnicas de representación del conocimiento para problemas de interpretación de imágenes en aplicaciones del entorno industrial, como producto de una fuerte hibridación entre las técnicas de la inteligencia artificial para la representación del conocimiento y las técnicas de interpretación de escenas a partir de imágenes digitales [4][5].
Posteriormente, se presente un creciente interés hacia el desarrollo de nuevas teorías y algoritmos para la interpretación de la imagen 2D como proyecciones de escenas 3D. En particular, cabe mencionar los problemas asociados a la reconstrucción de escenas a partir de distintas proyecciones, el estudio del flujo óptico y sus múltiples aplicaciones a la caracterización de superficies 3D, la caracterización de superficies a partir del estudio del movimiento, el estudio de las formas a partir de las sombras, las técnicas de representación y búsqueda de objetos, el estudio de la orientación a partir de texturas. De manera simultánea en el tiempo, al desarrollo de las técnicas y métodos matemáticos mencionados, se avanza en diferentes arquitecturas de computadores específicas para el procesamiento de datos en imágenes digitales. [6][7]. El procesamiento en paralelo con SIMD (del inglés Single Instruction Multiple Data) se usa en este tipo de aplicaciones. Los conceptos de procesadores con segmentación y procesadores vectoriales son de amplia utilización[8].
La totalidad de los métodos de inspección desarrollados son específicos al producto que se desea examinar. De esta manera, un método diseñado para reconocer las fallas en un producto, no siempre sirve para detectar las fallas en otro que tenga otra forma o color.
Para detectar fallas tanto en las materias primas como en las tarjetas electrónicas se han desarrollado algoritmos de detección que utilizan diferentes técnicas, las cuales se diferencian en su tiempo de respuesta y en la capacidad de adaptación y precisión [4].
La necesidad de incrementar la confiabilidad y exactitud en los sistemas de inspección visual lleva al uso de tarjetas con la tecnología SMT (Surface Mount Technology), en el que el ensamblaje de las mismas pasa por tres procesos: soldamiento de pistas en la tarjeta, posicionamiento de componentes y resoldamiento de los mismos. El sistema de visión desarrollado cumple con las tareas de: inspección de soldaduras, inspección de posición de componentes y de resoldamiento de componentes.[9]
El propósito de los sistemas automáticos de inspección es detectar fallas en las tarjetas electrónicas y para tal fin se han desarrollado varias técnicas de procesamiento de imágenes tales como sustracción de imágenes [10][11] y aproximaciones basadas en características [12]. Algunas de las técnicas usan operaciones morfológicas [13] [14]. Otras se basan en el acople de modelos [15]. En este tipo de sistema se obtiene una semántica gráfica que representa el circuito mediante la operación morfológica de "thinning", de mezcla y un borrado de segmentos[16]. En el sistema desarrollado por [17], un segmento de gráfica que representa el esqueleto del alambrado del circuito se compara con una librería modelo para inspeccionar el grosor de la pista eléctrica, la separación y el modelo del circuito deseado.
Otra técnica consiste en extraer el mínimo número de características diferenciadoras de un modelo de PCB (Printed Circuit Board) para detectar el máximo número de errores. El objetivo es detectar la falta de conectividad eléctrica y para tal efecto se focaliza en la posición de círculos (puntos) y de las trayectorias de conexión [17]. La limitación de esta última técnica es que solo aplica a tarjetas que no tienen componentes, solo detecta las pistas y sus conexiones. El modelo se basa en coordenadas y análisis de conectividad de los círculos mediante una nueva aproximación al enlace de bordes y una fusión de algunos algoritmos basados en regiones y bordes. Se utiliza el detector de bordes modificado de Canny [18] y un algoritmo no supervisado para diferenciar las regiones de la tarjeta electrónica.
La técnica de detección que involucra a elementos superficiales (SMD) para la inspección de tarjetas de circuito impreso (PCB), tiene la ventaja sobre los sistemas de inspección manual en su alta eficiencia y exactitud. El sistema consiste de dos módulos, el primero encargado del aprendizaje de las características de inspección, y el segundo de inspección en línea, el cual revisa las tarjetas usando un sensor 2-D de alta resolución y el conocimiento provisto por el modulo de aprendizaje. El programa de aprendizaje hace uso de algoritmos que extraen las características de inspección de la entrada, procesan la imagen y computan estadísticas. El módulo de inspección en línea consiste de algoritmos para el registro de imagen, el procesamiento y la comparación de características en la imagen de entrada con las características aprendidas en el modulo de aprendizaje. La salida del módulo de inspección indica si el producto falla o pasa la prueba. Las técnicas que se utilizan en este sistema comprenden detección de bordes y medición de áreas. Los pasos que se siguen son: encontrar marcas o señales en la tarjeta, binarizar la imagen, detectar y corregir el ángulo de la tarjeta, mapear los componentes basados en la información del módulo de aprendizaje y detectar el área de cada componente en la imagen. [9].
En general se puede decir que la diferencia entre la gran variedad de sistemas desarrollados con propósitos de investigación y/o comerciales radica en la aplicación de diversas técnicas que permiten la adaptación a cambios de iluminación, posición y en algunos casos color.
B. Problemática
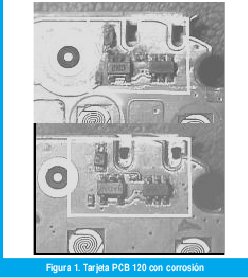
La manipulación, identificación y análisis de tarjetas electrónicas de celulares es un proceso cotidiano en los centros de servicio técnico celular. A partir de una simple inspección visual por parte del técnico, se puede establecer un análisis preliminar del posible estado de operabilidad de una tarjeta celular. En la figura 1 se aprecia una tarjeta celular afectada por la corrosión. Su identificación es puramente visual y manual, en ocasiones es difícil detectar el tipo de sombras a través del ojo humano.
La corrosión que se detecta es de tipo anódica y es debida el espaciamiento entre componentes de circuitos integrados cuando un voltaje es aplicado a un dispositivo. Los gradientes de voltaje del orden de 105 a 106 V/cm pueden existir a través de la superficie, acelerando las reacciones de corrosión electroquímica y migración iónica. Los circuitos integrados con metalizaciones de aluminio son susceptibles a la corrosión. La combinación de los campos eléctricos y humedad atmosférica lleva a la corrosión a atacar al aluminio. Las metalizaciones de oro y cobre también están sujetas a la corrosión bajo estas condiciones.
Lo anterior, motiva el abordar la problemática desde un punto de vista formal, mediante el procesamiento de imágenes y reconocimiento de patrones, que en nuestro caso se lleva a cabo a través del método de morfología matemática [19].
C. Morfología Matemática
La palabra morfología usualmente denota la rama de la Biología que se dedica al estudio de la forma y estructura de los animales y plantas. Usaremos aquí la misma palabra en el contexto de morfología matemática. La morfología matemática en el análisis de imágenes tiene como principales protagonistas a Matheron y Serra [20]. La aproximación no morfológica al procesamiento de imágenes está próxima al cálculo y se basa en conceptos de delta de Dirac y transformaciones lineales como la convolución [21]. La morfología matemática se basa en geometría y forma; las operaciones morfológicas simplifican imágenes y conservan las principales características de formas de los objetos [21] [22]. Un sistema de operadores como los de la morfología matemática es útil porque pueden formarse composiciones de sus operadores, que cuando actúan sobre formas complejas son capaces de descomponerlas en aquellas partes que tienen sentido y separarlas de las que le son extrañas. Un sistema de operadores de este tipo y su composición permite que las formas subyacentes se identifiquen y se reconstruyan de forma óptima a partir de sus formas distorsionadas y ruidosas. Además, permite que cada forma se entienda en función de una descomposición, siendo cada entidad de esa descomposición una forma simple apropiada [22].
Lo que el álgebra de convolución hace con los sistemas lineales, lo hace la morfología matemática con las formas. Puesto que las formas contienen mucha información en la visión artificial, su importancia es evidente. Las operaciones morfológicas pueden simplificar los datos de la imagen, preservar las características esenciales y eliminar aspectos irrelevantes. Teniendo en cuenta que la identificación y descomposición de objetos, la extracción de rasgos, la localización de defectos e incluso los defectos en líneas de ensamblaje están sumamente relacionados con las formas, es obvio el papel que juega la morfología en visión artificial. Las transformaciones morfológicas, constituyen usualmente una parte intermedia de la secuencia del procesamiento de imágenes. En una primera fase, la imagen se digitaliza y se preprocesa usando operadores de convolución locales y luego se segmenta para obtener una imagen binaria en la que se separan los objetos del fondo. Las operaciones morfológicas pueden formar una segunda fase que opera sobre la forma de esos objetos. El último paso del procesamiento evalúa los resultados de la morfología usando descriptores numéricos o sintácticos [22]. La morfología matemática se puede usar, entre otros, en el pre-procesamiento de imágenes (supresión de ruido, simplificación de formas), en destacar la estructura de los objetos (extraer el esqueleto, marcado de objetos, envolvente convexa, ampliación, reducción), y en la descripción cualitativa de objetos (área, perímetro, etc).
Análisis morfológico. Las transformaciones morfológicas extraen y alteran la estructura de los objetos en una imagen. Se pueden usar estas trans- formaciones para preparar los objetos a un análisis cuantitativo, observar la geometría de las regiones, extraer las formas más simples para propósitos de modelación e identificación, etc. Las transformaciones morfológicas se usan para expandir o reducir objetos, rellenar hoyos, cerrar inclusiones, suavizar bordes, remover dendritas, entre otras. Se pueden dividir en dos categorías: funciones morfológicas a nivel de gris, las cuales aplican a imágenes en nivel de gris y funciones morfológicas binarias, las cuales aplican a imágenes binarias. Una imagen binaria es una imagen segmentada dentro de una región objeto (píxeles iguales a uno) y una región fondo (píxeles iguales a cero).
Funciones morfológicas binarias primarias. El lenguaje de la morfología matemática binaria es el de la teoría de conjuntos. Los conjuntos en morfología matemática representan las formas presentes en imágenes binarias o de niveles de gris. El conjunto de todos los píxeles blancos en una imagen en blanco y negro (binaria) constituye una descripción completa de la imagen. Las operaciones primarias morfológicas son la erosión y la dilatación. A partir de ellas podemos componer las operaciones de apertura y clausura. Son estas dos operaciones las que tienen mucha relación con la representación de formas, la descomposición y la extracción de primitivas. Las funciones morfológicas binarias aplican a imágenes binarias en las cuales las partículas están puestas a 1 y el fondo a 0. Las más representativas son: erosión, dilatación, apertura, cierre, gradiente interno, gradiente externo. [16],[21].
Erosión binaria. La erosión elimina los píxeles aislados en el fondo y erosiona el contorno de los objetos con respecto al modelo definido por el elemento estructural. Se usa para simplificar la estructura de un objeto descomponiéndolo en partes más simples. Se define matemáticamente para un píxel Po, el elemento estructural está centrado en Po. Los píxeles con máscara con un coeficiente de elemento estructural igual a 1 son entonces referidos como Pi. En el caso de un elemento estructural 3 x 3, el Pi puede estar en el rango desde el mismo Po hasta P8..Si el valor de un píxel Pi es igual a 0, entonces Po es puesto a 0, de lo contrario Po es puesto a 1.

Dilatación binaria. La dilatación tiene el efecto inverso de la erosión debido a que dilatar objetos equivale a erosionar el fondo. Esta función elimina pequeños hoyos aislados en objetos y expande el contorno de los objetos con respecto al modelo definido por el elemento estructural [9]. Se define matemáticamente para un píxel dado Po, donde el elemento estructural está centrado en Po. Los píxeles con máscara de coeficiente estructural igual a 1 son referidos como Pi. En el caso de un elemento estructural de 3 x 3, el rango que puede tomar Pi vadesde el mismo Po hasta P8. Si el valor de un píxel Pi es igual a 1, entonces Po es puesto a 1, de otro modo Po es puesto a 0. Si
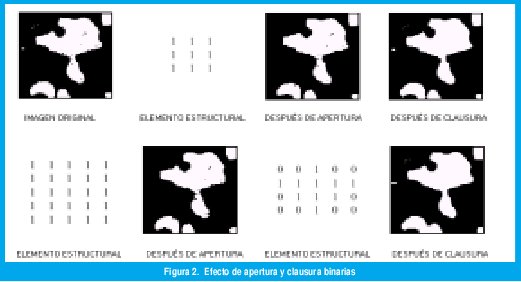

Apertura binaria. La función de apertura es una erosión seguida por una dilatación. Esta función remueve objetos pequeños y suaviza bordes. SI I es una imagen entonces

Esta operación no altera el área y la forma de los objetos significativamente ya que la dilatación y la erosión son transformaciones duales. Los bordes removidos por la erosión son restaurados por la dilatación. Sin embargo, los objetos pequeños que se desvanecen durante la erosión no reaparecen después de la dilatación.
Clausura binaria. La función de clausura es una dilatación seguida de una erosión. Rellena hoyos pequeños y suaviza bordes. SI I es una imagen entonces

Los bordes expandidos durante la dilatación son reducidos por la erosión. Sin embargo, los hoyos pequeños rellenados durante la dilatación no reaparecen después de la erosión. La figura No. 2 muestra el proceso.
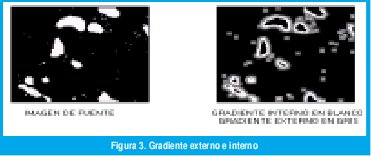
Gradiente Externo. El gradiente externo substrae la imagen fuente de la imagen dilatada. Los píxeles remanentes corresponden a los adicionados por la dilatación. Si I es la imagen entonces

Gradiente interno.
El gradiente interno substrae la imagen erosionada de su imagen fuente. Los píxeles remanentes corresponden a aquellos eliminados por la erosión. SI I es la imagen entonces

En la siguiente figura se aprecia el gradiante externo e interno:
III. DISEÑO DEL SISTEMA
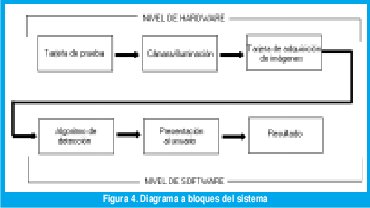
El desarrollo del prototipo incluye tanto hardware como software. El siguiente diagrama de bloques ilustra su concepción.
A. Desarrollo de Hardware
La confiabilidad del sistema implica cumplir con estándares, de tal forma que, las condiciones de la adquisición de la imagen sean idealmente las mismas y las perturbaciones del sistema sean mínimas. Dos factores importantes a considerar son la iluminación y la posición de los elementos que componen la adquisición (cámara y tarjeta).
Modulo de Adquisición: Para la estandarización de la adquisición de la imagen, el primer paso es la construcción de un módulo que aisle la PCB (del inglés Printed circuit board ) celular de los parámetros externos ajenos como son la iluminación externa, estandarización del foco, el ángulo de enfoque sobre el PCB y el posicionamiento de la tarjeta para su análisis.
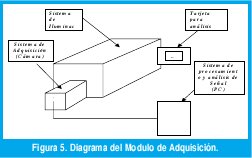
En su interior el módulo tiene los sistemas de iluminación, soporte de inserción de tarjetas, sistema mecánico deslizable de foco (lente) y sistema de fijación de cámara. La figura 5 muestra el módulo.
Sistema de iluminación: Su propósito es la separación del objeto a inspeccionar en fracciones o partes de acuerdo con los fondos circundantes en tantos niveles de gris como sea posible. El máximo contraste entre las partes de la imagen, permite distinguir los puntos realmente importantes. Se debe considerar la sensibilidad mínima del objeto a la iluminación, la posición y la orientación de la luz (factores claves en la calidad de la imagen), la cámara, los lentes y la técnica de procesamiento de la imagen.
Sistema de lente de resolución: La aplicación exige una muy buena resolución para detectar pequeñas partículas. Se empleó un lente de foco básico, soportado sobre un sistema deslizable ubicado en la parte superior del módulo mediante el cual se puede interactuar con la posición del lente y su distancia focal. Para el análisis de la tarjeta se dividió en cuatro tomas diferentes con el fin de no perder resolución en la misma teniendo en cuenta la reducida dimensión de los componentes de la PCB.
Sistema de Cámara y Tarjeta de Adquisición de imágenes IMA: La cámara empleada es análoga marca SONY Handycam DCR TRV130. Su fijación debe evitar, el ruido que pueda ser introducido a la señal por distorsiones ocasionadas por movimiento. La digitalización de la imagen se realiza mediante la tarjeta de adquisición de imágenes Imaq Vision PCI1411 de National Instruments, que adicionalmente nos permite interactuar directamente con el programa LabVIEW. Por medio de la tarjeta y la cámara se controla el sistema de captura de imagen y se acondiciona la señal de entrada para ser procesada por el algoritmo de programación.
B. Desarrollo de Software
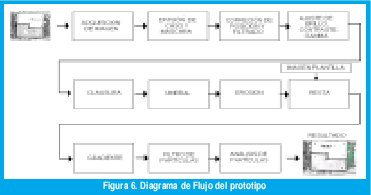
La primera etapa del proceso consiste en la adquisición de la imagen y el ajuste de la misma. Se captura una imagen de 8 bits, en formato de luminancia. El algoritmo se basa principalmente en la comparación de dos imágenes usando técnicas de morfología matemática y binaria. La primera imagen es una plantilla, que proviene de la imagen procesada de tarjetas en perfecto estado. La segunda imagen es la adquirida en el módulo y procesada del mismo modo que la plantilla. En la plantilla, el algoritmo resalta los componentes metálicos, aquellos susceptibles a la corrosión anódica. Cuando este mismo algoritmo se aplica a la tarjeta en prueba, se detectan las formas que no corresponden y se resaltan los elementos extraños a la tarjeta, causados por la sulfatación. De no ser encontrado algún elemento extraño, la tarjeta pasa la prueba, es decir, se encuentra en buen estado físicamente. A continuación se describen las etapas fundamentales del algoritmo de detección de corrosión.
Descripción de la imagen implementada. A partir de la captura inicial de la imagen, se optó por una imagen de muestra de Luminancia de 8 bits. La imagen en este formato compone los tres planos permitiéndonos de este modo incluir las características de cada uno (verde, azul y rojo).
Resolución y Tomas de Captura. Teniendo en cuenta el tamaño de la PCB (127mm x 43mm x 28mm) en razón a la distancia focal que se requiere para una resolución adecuada que facilite detectar la falla, se divide el sistema en cuatro tomas diferentes lo que facilita obtener una resolución de 640 x 470 píxeles. La imagen dividida en cuatro tomas diferentes se muestra en la siguiente figura.

División de los Casos. Se definen cuatro casos fundamentales para el análisis de la PCB. Cada caso incluye cada una de las tomas del sistema de modo que se analizan los componentes que emplean voltajes de control elevados para el análisis de la corrosión por sulfatación a través de una máscara.
Corrección y calibración de la Imagen. A través de la implementación de un sistema de coordenadas referencial para la imagen adquirida, se estandariza su posición y se elimina al máximo el error introducido por el posicionamiento de la PCB.
El sistema de coordenadas se basa en la ubicación de una ROI (Región de interés) sobre la imagen y se toma como referencia. Para cada una de las capturas se toma una ROI diferente. El sistema se ajusta a la ubicación espacial de las ROI en la imagen.

Como se puede apreciar en la figura No. 8, cada imagen toma un elemento de referencia y a partir de él se genera el sistema de coordenadas.
Filtrado de Imagen. En el filtrado, el objetivo es mejorar las condiciones de la imagen mediante la aplicación de un filtro de entrada, que busca reducir al máximo los valores indeseados de la imagen que ocasionarían un desempeño ineficiente del sistema. El principio para el filtrado utiliza la metodología de convolución con "kernels" definidos para efectos específicos y la posibilidad de ajustar ganancias y valores "offset" para niveles de gris en el rango permitido antes de registrar la imagen en memoria. Los operadores de contornos, kernels, llamados gradientes detectores, son unas plantillas adecuadas que usan patrones con pesos positivos y negativos para realzar el contraste en los píxeles donde hay cambio en los niveles de brillo. Naturalmente que, el nuevo valor de un pixel depende de los valores del "kernel" y de los valores vecinos cubiertos por la plantilla. Se probó el filtro de media pero se pierde resolución en los límites entre un pixel y otro. Por las características de la imagen se opta por probar otros dos tipos diferentes de filtros.
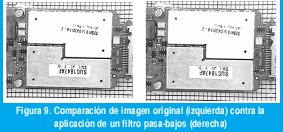
Filtros pasa bajo: El filtro atenúa las variaciones de la intensidad de luz. Tiene la tendencia a delimitar la imagen, eliminando detalles y limpiando bordes. En nuestro caso ayuda a eliminar pequeños detalles de fallas por ruido de iluminación y a limpiar los pequeños detalles de brillo en las esquinas, en la figura 9 se muestra una comparación de la imagen original contra la aplicación del filtro pasa-bajo.
Estandarización en características de Brillo, Contraste y Gama (BCG). Para la aplicación es de vital importancia un valor adecuado de estos parámetros con el fin de obtener una imagen que resalte las características de corrosión y se pueda diferenciar los píxeles teniendo en cuenta los valores en escala de grises típicos de dicha imagen. A continuación se muestra una imagen en la que se aprecia la aplicación de los valores BCG después de aplicar la máscara a la región de interés (ROI).

Aplicación de Morfología de escala de grises Clausura. Una vez obtenida la imagen se aplica la operación morfológica a escala de grises de Clausura o cierre. Esta operación remueve los puntos oscuros y ayuda a definir los contornos y formas de la imagen suavizando los bordes. Un cierre es una dilatación seguida por una erosión que no altera significativamente el área o forma de objetos.
Operación de Umbral. Es uno de los pasos fundamentales del algoritmo. Se extraen las características principales que permiten los análisis de partículas necesarias. Mediante un muestreo aleatorio a las PCB se determina el intervalo del umbral para la binarización de la imagen y la detección de formas irregulares generadas por la corrosión.
Aplicación de Morfología Binaria Erosión.Con la aplicación nuevamente de operaciones de morfología matemática se logra acondicionar de nuevo la imagen de procesamiento con el fin de resaltar las características de los pixeles que se están analizando. El elemento estructural del cual se obtiene el mejor resultado es el tamaño 3x3.
Imagen plantilla. En esta etapa del algoritmo se extraen las características principales de la tarjetaplantilla, es decir, la tarjeta que no contiene ningún tipo de elemento extraño. Se toman varias tarjetas a las cuales se les aplica el mismo proceso, se obtiene una plantilla estándar que resalta los elementos metálicos, y se compara con los obtenidos en la tarjeta en prueba. Se procesan la imagen plantilla con la imagen obtenida en el módulo de adquisición. Posteriormente se realiza la resta de estas imágenes binarias en donde se destacan las diferencias entre una y otra, evidenciando la presencia de sustancias extrañas como se muestra en la figura No. 11.

Gradiente interno. Comprende otro tópico de las operaciones morfológicas. Afecta la forma de píxeles en las imágenes binarias. Se emplean estas funciones para las tareas como extender o reducir los objetos, llenando los agujeros, cerrando las partículas, y suavizando los bordes para delinear los objetos y preparar las imágenes para el análisis cuantitativo. En este caso se emplea un arreglo 2D como una máscara binaria para definir a los vecinos de un píxel. Si una celda es negra, tiene un valor de uno. Si una celda es blanca (vacío), tiene un valor de 0. Si negra, se considera que el píxel correspondiente es un vecino y su valor se usa durante el funcionamiento de la morfología. Con el gradiente interno se extrae el contorno interior de una partícula.
La siguiente gráfica ilustra el funcionamiento del gradiente interno aplicado en la cuantización para el análisis de resultados.

Filtro de Partículas: Una vez obtenida la imagen con las partículas de corrosión se procede a un filtrado de partículas, mediante el cual se remueven los elementos que pudieron haber sido introducidos en pasos anteriores. Para este filtrado se tienen en cuenta varios aspectos como el área de las partículas, el posicionamiento XY, las regiones convexas, entre otros
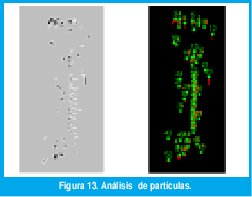
Análisis de partículas: Ejecutadas las etapas del algoritmo, se efectúa un análisis cuantitativo de aquellas partículas halladas, que corresponden a la corrosión. En este análisis se detalla la ubicación y mediciones de área de cada uno de los puntos encontrados, como se aprecia en la figura No. 13.
IV. Programación en LabVIEW y Resultados
El desarrollo del programa se lleva a cabo sobre LabVIEW. Esta plataforma de programación gráfica posibilita la realización de una interfaz sencilla al usuario y brinda además las herramientas necesarias para facilitar la generación de reportes y análisis gráficos. Una extensión del trabajo de investigación y desarrollo que es la base del presente artículo está descrito en [ 23].
Estructuración del Programa. El programa se estructura sobre cuatro tópicos básicos: configuración, adquisición, análisis y resultados. Cada uno de ellos está representado en ventanas del software las cuales permiten interactuar con el usuario.
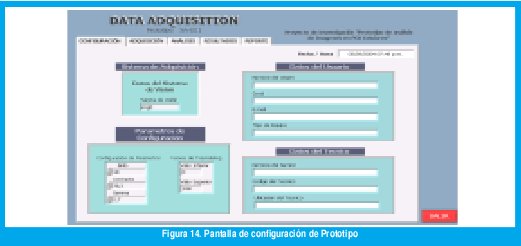
Configuración. Incluye una interfaz de usuario que maneja básicamente los valores de configuración del sistema, las entradas, la generación del reporte de salida, los datos de configuración de la tarjeta de adquisición de Imágenes IMAQ 1411, los parámetros generales de adquisición de la imagen como umbral, brillo, control y gama, entre otros. La figura No. 14 muestra la pantalla de configuración desarrollada que incluye los datos de usuario así como los del equipo
Adquisición.Una vez configurada la tarjeta y el sistema, el programa procede a la captura de la imagen. La pantalla de adquisición se muestra a continuación.

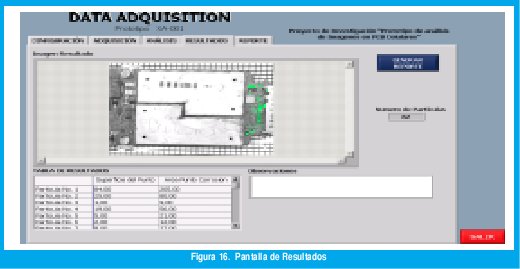
Análisis y Resultados. El procedimiento de análisis se encarga de procesar la imagen obtenida. En el procedimiento de resultado se toman todos los valores generados en la configuración, la adquisición y el análisis de la PCB, y se presenta una tabla de resultados con el número de partículas de corrosión encontradas durante el análisis. Los datos son alma cenados en un registro histórico del equipo. A continuación se muestra la interfaz de resultados y de reporte. En la figura No. 16 se aprecia la imagen con los puntos de corrosión superpuestos así como la tabla de resultados con los reportes en formato html. El prototipo ha sido probado a nivel empresarial con resultados satisfactorios.
V. CONCLUSIONES
En el desarrollo del prototipo se confirmó que el sistema de iluminación y posición de las tarjetas a probar es fundamental, pues un ligero cambio produce un efecto indeseado en la respuesta del sistema. El sistema de posicionamiento de la tarjeta debe ser estándar para todas las tomas. Mediante ajustes de posición a nivel de software se corrige el posible desfase producido por la variación de posición.
La utilización de morfología matemática en el algoritmo de detección comprobó ser un método sencillo y eficaz, que lleva a los resultados deseados. La combinación de las técnicas de matemática morfológica usadas para erosión, dilatación, gradiente interno y externo, así como las funciones básicas y operadores de tratamiento de imágenes resultaron ser de gran utilidad y sencillez; primero, en la etapa de adaptación y estandarización de las imágenes digitales capturadas, y luego en la etapa de detección de la falla propuesta. En las operaciones morfológicas se usaron elementos estructurantes de tamaño 3x3 que permitieron resaltar los errores detectados. Se escogió ese elemento estructurante porque delineaba mejor los objetos encontrados. Las pruebas iniciales en el análisis de la imagen previo a los resultados indicaron la necesidad de efectuar pequeños ajustes y la utilización de un equipo de cómputo con mayor capacidad de memoria para el funcionamiento normal del sistema. Efectuados dichos ajustes, el sistema y prototipo desarrollado se ha probado a nivel empresarial con resultados satisfactorios y aceptación del mismo.
Conviene mencionar que el presente trabajo de investigación y desarrollo no habría podido realizarse sin la participación del medio externo empresarial dada la infraestructura y equipamiento necesario para las pruebas permanentes de funcionamiento. Es entonces un muy buen acercamiento de la academia y el medio externo. Adicionalmente, el sistema con ligeras modificaciones puede ser usado para otro tipo de celulares.
VI. REFERENCIAS BIBLIOGRÁFICAS
[1] MINCOMUNICACIONES-ETB, «Prospecto de Colocación de Acciones Privilegiadas del Programa Acciones ETB- Colombia», Febrero 2003.
[2] Publicado por STANDARD & POOR'S, «Perspectivas de la industria de las telecomunicaciones de América Latina para el 2004», División de The McGraw-Hill Companies, Inc., enero de 2004
[3] MARR,D; HILDRETH, E.: «Theory of Edge Detection», Proc. Roy. Soc. London, vol. B 207: (187-217), 1980.
[4] KUSTURI R. y JAIN R., «Computer Vision: Advances & Applications». IEEE Computer Society Press, 1991.
[5] BROWN M. ET AL, «Advances in Computational Stereo», IEEE Transactions on Pattern Analysis and Machine Intelligence, vol 25, N.8, 2003.
[6] NOZAL, L. "Arquitectura para procesamiento de imágenes: criterios estructurales de diseño". Mundo electrónico. No. 236 Marzo 199 342-48.
[7] GONZALES R. , WOODS R. "Digital Image Processing", Addison-Wesley Publish.Company, 1992.
[8] DIAZ, A.. "Visión y procesamiento de imágenes para control de calidad". Proyecto de Investigación. Revista Universidad Eafit (Medellín) No. 103 Julio 1996.
[9] MURPHEY Y., CHEN T., ZHANG J., ZHOU Y., «A Smart Machine Vision System for PCB Inspection»,. Department of Electrical and Computer Engineering University of Michigan-Dearborn. Noviembre, 2000.
[10] LEE, D., "A computerized automatic inspection system for complex printed thick film patterns" , SPIEAppl. Electron .Imaging Syst. 143,1978.
[11] HARA Y., H. Doi , K.Karasaki, T.lida, "A system for PCB automated inspection using fluorescent light", IEEE Trans. Pattern Anal. Mach. Intell. 10(1), 1988.
[12] PRATT, W., "Image detection and registration, Digital Image Processing", pp.551-566;Wiley- Interscience, New York,1978.
[13] AHMED M. .DARWISH Y, JAIN K., "A Rule Based Approach for Visual Pattern Inspection", IEEE Transactions on Pattern Analysis and Machine Intelligence, vol. 10,No 1,Enero 1988.
[14] HOGUZ S., ONURAL L., " An automated system for design-rule based visual inspection of printed circuit boards", in Proceedings of the 1991 IEEE International Conference on Robotics and Automation, Sacremento, CA, Abril 1991.
[15] ROSENFELD A. ,KAK A.," Digital Picture Processing" , Vol. I, Academic Press, Orlando, FL.
[16] CASTLEMAN, K, "Digital Image Processing". Prentice Hall, 1996
[17] SPRAGUE A., DONAHUE M., y ROKHLIN S., "A method for automatic inspection of Printed Circuit Boards", CVGIP:Image Understanding 54(3), 1991.
[18] CANNY, J. "Computational Approach to Edge Detection", IEEE Transactions on Pattern Analysis and Machine Intelligence, vol. Pami-8,No. 6,Noviembre 1986.
[19] DEKKER, M. «Mathematical morphology in image processing» .Edited by Edward Dougherty, Rochester Institute of technology.Rochester, New York. 1993
[20] SERRA. J. "Image Analysis and Mathematical Morphology ". Academic Press, 1982.
[21] DOUGHERTY E., " An Introduction to Morphological Image Processing", SPIE Optical Engeenering Press, 1992.
[22] NATIONAL INSTRUMENTS, "IMAQ Vision concept manual", National Instruments Corporation. Octubre 2000
[23] ROJAS A., DÍAZ S. «Sistema de detección de falla en un tipo de tarjeta electrónica de celulares tipo Motorola». Trabajo de Grado. Universidad Distrital, Facultad de Ingeniería, Agosto de 2004.
Alvaro Betancourt Uscátegui
Ingeniero Electrónico, Universidad Distrital Especialista en Telecomunicaciones Móviles, Universidad Distrital, Msc. Ciencias Financieras y de Sistemas, Universidad Central, Magister en Ingeniería, Informatique Appliquée, Ecole Polytechnique Université de Montreal, Canada, Profesor Facultad de Ingeniería, Universidad Distrital, Director del Grupo de Investigación LAMIC - U. Distrital. abetancourt@udistrital.edu.co
Alexander Rojas y Sergio Díaz
Ingenieros Electrónicos Universidad Distrital Francisco José de Caldas. Funcionarios de la Empresa Motorola. joxander@hotmail.com sergiodiaz80@hotmail.com
Creation date:
License
![]()
From the edition of the V23N3 of year 2018 forward, the Creative Commons License "Attribution-Non-Commercial - No Derivative Works " is changed to the following:
Attribution - Non-Commercial - Share the same: this license allows others to distribute, remix, retouch, and create from your work in a non-commercial way, as long as they give you credit and license their new creations under the same conditions.

2.jpg)



