DOI:
https://doi.org/10.14483/23448393.2690Published:
2002-11-30Issue:
Vol. 8 No. 2 (2003): July - DecemberSection:
Science, research, academia and developmentProcesamiento Difuso de Imágenes: Filtro Difuso para Eliminar el Ruido Impulsivo
Keywords:
procesamiento difuso de señales, ruido impulsivo, ruido gaussiano, filtros lineales, filtro difuso (es).Downloads
References
KLI George J., Yuan Bo., "FUZZY SETS AND FUZZY LOGIC". Theory and applications. Prentice Hall, 1995.
Wang, Li-Xin. "ADAPTATIVE FUZZY SYSTEMS AND CONTROL". Prentice Hall, 1994.
Elsevier Science. FUZZY SETS AND SYSTEM, Special issue on Fuzzy Signal Processing. Vol. 77, issue 1,15, Enero 1996.
Chen C.H. , "FUZZY LOGIC AND NEURAL NETWORK HANDBOOK ", McGRAW-Hill, Inc.1996.
IEEE "A FUZZY APPROACH TO 2-D SHAPE RECOGNITION", IEEE Transaction on fuzzy systems, Vol 9, No 1, 2001.
Tizhoosh, Hamid R. "FUZZY IMAGE PROCESSING: INTRODUCTION TO THEORY AND PRACTICE " . SprinngerVerlang.,Octubre 1997.
Gonzales R., Woods R., " DIGITAL IMAGE PROCESSING ", Addison - Weslwy Co. , 1993.
Cadzow J., Martens H. " DISCRETE TIME AND COMPUTER CONTROL SYSTEMS ", Prentice Hall, 1970.
Furui S. "DIGITAL SPEECH PROCESSING, SYNTESIS AND RECOGNITION ", Marcel Decker, 1989.
Oppenheim Alan V., Schafer Ronald W, " DIGITAL SIGNAL PROCESSING ". Prentice Hall Inc. 1989, USA.
Yang, X and S.Toh, P , "Adaptive Fuzzy Multilevel Median Filter", IEEE Transactions Image Processing,vol. 4, no. 5, 1995.
Russo, F., Ramponi, G. SPLetters(3), "A FUZZY FILTER FOR IMAGES CORRUPTED BY IMPULSIVE NOISE". No. 6, June 1996, pp. 168- 170.
Wang. X, "ADAPTATIVE MULTILEVEL MEDIAN FILTER", IEEE Trans. Signal Processing, Vol 4, No 4, April 1992
Mujica Ballesteros A.E., " Eliminación del Ruido Aleatorio en Imágenes 2D utilizando Lógica Difusa ", Trabajo de Grado, Universidad Distrital, 2002.
How to Cite
APA
ACM
ACS
ABNT
Chicago
Harvard
IEEE
MLA
Turabian
Vancouver
Download Citation
Ciencia, Investigación, Academia y Desarrollo
Ingeniería, 2003-00-00 vol:8 nro:2 pág:40-46
Procesamiento difuso de imágenes: filtro difuso para eliminar el ruido impulsivo
Álvaro Betancourt Uscátegui
Director del Grupo LAMIC, Universidad Distrital Francisco José de Caldas.
Andrés Edwin Mujica Ballesteros
Ingeniero de Sistemas, Universidad Distrital Francisco José de Caldas.
Hernán Darío Tapias
Profesor Ingeniería de Sistemas, Universidad Distrital Francisco José de Caldas.
Resumen
En el presente artículo se describen los fundamentos sobre la lógica difusa aplicada al procesamiento de imágenes, el modelamiento de diferentes estadísticas de ruido (impulsivo, y gaussiano) , los filtros clásicos para la eliminación del ruido aleatorio y finalmente el filtro multipaso para la eliminación del ruido implementado por los autores.
Palabras Clave: procesamiento difuso de señales, ruido impulsivo, ruido gaussiano, filtros lineales, filtro difuso.
Abstract
This paper describes the fundamentals on fuzzy logic signal processing, modelling of differents statistical noise distribution ( impulsive, gaussian), clasical filters and multipass filter implemented by the authors.
Key words: Fuzzy Signal Processing, Impulsive Noise, Gaussian Noise, Lineal Filter, Fuzzy Filter.
I. INTRODUCCIÓN
Son múltiples las aplicaciones que hoy en día utilizan la lógica difusa para obtener resultados aceptables en distintas áreas de la ciencia. Cada vez es más frecuente su uso en la predicción de fenómenos naturales, caos en sistemas, ciclos complejos de mercado así como en la mayoría de actividades que tienen una variación inesperada de resultados. Un sistema difuso puede ayudar a modelar y controlar cualquier sistema lineal o nó lineal cuando no se dispone de un modelo matemático. Basándose en el comportamiento de las salidas que a su vez dependen de las entradas, este sistema difuso usa comúnmente reglas en lugar de modelos matemáticos. Estas reglas construyen un puente entre el espacio ingreso y salida [1,2,3,4].
El procesamiento difuso de señales abarca un extenso conjunto de procedimientos y aplicaciones para el tratamiento de los fenómenos; los datos relacionados se convierten en datos comprensibles para los equipos computaciones que a su vez se convierten en señales.
Las imágenes representan cada vez más una muy importante clase de datos medidos. De hecho, la instrumentación basada en imágenes, encuentra un creciente número de áreas de investigación como astronomía, fotometría, física de partículas, biología, ciencias médicas, geología, ciencia de materiales, entre otros. Mediciones basadas en imágenes también tienen una gran importancia en el control de calidad y la automatización.
En el tratamiento de imágenes la utilización de la lógica difusa, tiene también una amplia gama de aplicaciones desde la medicina hasta las telecomunicaciones, pasando por el arte, las ciencias sociales y los hallazgos espaciales. Ambitos de aplicación en el tratamiento de imágenes, son los de la aproximación difusa al reconocimiento de formas en 2-D y los modelos de predicción de consumidores basado en rasgos digitales, los cuales son ampliamente tratados en [5].
La presencia de ruido puede afectar significativamente la exactitud del proceso de medición basada en imágenes. De hecho, muchos de los métodos más comúnmente empleados para la abstracción de características, reconocimiento de objetos y estimación de parámetros son muy sensibles al ruido.
El ruido se encuentra permanentemente en la práctica y en general ocasiona pérdidas en la calidad de la imagen. La reducción de ruido es entonces uno de los principales desafíos y de las más importantes aplicaciones en el campo de procesamiento de imágenes.
El estudio del ruido como modificación de la imagen original depende de las principales técnicas para el procesamiento de este tipo de fenómeno que se presenta en las imágenes. La lógica difusa con sus características de modelamiento por medio de reglas de inferencia permite acercarnos a métodos sofisticados para eliminar esta clase de ruidos aleatorios tan comúnmente presentados en la naturaleza.
El artículo se organiza como sigue: en la segunda sección se presenta el procesamiento difuso en imágenes; en la tercera sección se muestran los diferentes tipos de ruido; a continuación, se expone una breve teoría sobre filtros digitales haciendo énfasis en el filtro multipaso. En la quinta sección se presentan los resultados vía simulación y finalmente las conclusiones.
II. PROCESAMIENTO DIFUSO DE IMÁGENES
El procesamiento difuso de imágenes no es una teoría por sí sola; es más bien un conjunto de diferentes aproximaciones difusas al procesamiento de imágenes. Una definición al respecto es la propuesta por Tizhoosh [6]:
"El procesamiento difuso de imágenes es el conjunto de aproximaciones que entienden, representan y procesan las imágenes, sus segmentos y características como conjuntos difusos. La representación y procesamiento dependen de la técnica difusa seleccionada y en el problema a resolver."
El procesamiento difuso de imágenes tiene tres fases principales: difusión de la imagen, modificación de los valores de membresía el procesamiento en la máquina de inferencia y, si es necesario, concreción de la imagen. En la figura No. 1.a se muestra la estructura general del procesamiento difuso de imágenes.
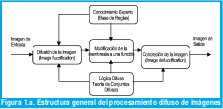
Cuando no se hace uso del hardware difuso, es necesario realizar procesos de difusión ( codificación de la imagen en términos difusos) y de concreción (decodificación de los términos difusos en imagen). Dichos procesos permiten aplicar técnicas difusas en el procesamiento de la imagen.
Entre las principales razones para utilizar la lógica difusa en el procesamiento de las imágenes es que las técnicas difusas son herramientas poderosas para la representación y procesamiento del conocimiento y que además las técnicas difusas pueden manejar eficientemente la vaguedad y la ambigüedad.
La incertidumbre, sin embargo, no siempre es debida a la aleatoriedad sino a también a la ambigüedad y a la vaguedad. Además de la aleatoriedad (representada con la teoría de la probabilidad) se pueden distinguir otras tres formas de incertidumbre en el procesamiento de imágenes: Ambigüedad en niveles de gris, la geometría difusa y el conocimiento incierto [6]. Como se muestra en la figura 1.b.

El cuestionamiento sobre si un píxel debe ser más oscuro o más brillante de lo que es actualmente, o la inquietud sobre el límite entre dos segmentos de imagen, o la pregunta sobre la ubicación del árbol en un análisis de escena son problemas difusos. Se trata de ejemplos de situaciones en las que una aproximación difusa puede ajustarse más a la forma correcta de manejar la incertidumbre.
En muchas aplicaciones de procesamiento de imágenes, es necesario utilizar el conocimiento experto para resolver las dificultades, por ejemplo, en el reconocimiento de objetos, análisis de escenas y análisis de imágenes médicas.
III. RUIDOS EN LA NATURALEZA
Se puede definir el ruido como cambios que presentan los píxeles en una imagen. De alguna forma modifican las características de dicha imagen (bordes, nitidez, brillo, contraste, etc) . En las imágenes mismas se encuentran principalmente dos tipos de ruido : uniforme e impulsivo. Una clasificación de los ruidos en las imágenes se presenta en la figura No. 2 y la comparación de los tipos de ruido gaussiano e impulsivo afectando una imagen se muestra en la figura No. 3.


A. RUIDO UNIFORME
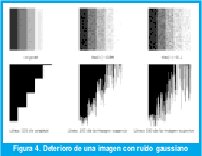
El ruido uniforme se representa por cambios en la imagen en los niveles de gris aunque sin saturar la intensidad de los píxeles. Es el más sencillo de representar dada la aproximación de distribución que utiliza el cual sigue la forma de una campana gaussiana [7]. Esta aproximación gaussiana tiene cola exponencial ancha, momento y varianza finitos y permite minimizar el efecto del ruido al obtener una imagen lo más cercana a la realidad. La mejor manera de representar los tipos de ruido en una imagen es por medio de las distribuciones alpha-estable. La fórmula para generar este tipo de valores es la siguiente:

En donde u1 y u2 son números aleatorios y los valores en la curva α= 2, β=0
El deterioro de una imagen con ruido gaussiano se observa en la figura No. 4
B. RUIDO IMPULSIVO
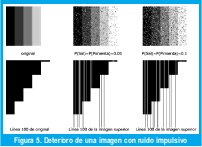
El ruido impulsivo (también denominado de sal y pimienta) se puede definir como picos estrechos de intensidades altas, observadas como puntos oscuros que ocultan bien una parte de una imagen y en ocasiones su totalidad [7].
Este tipo de fenómeno es útil cuando la imagen presenta un marcado acento de luminosidad ya que reduce la borrosidad de la imagen. El ruido impulsivo es representado con un caso de la distribución particular del tipo alpha - estable (α- estable) en donde 0 < α <2, conocida como la distribución Cauchy. Por su modelo simétrico y picos de magnitudes altas reproduce con alta eficiencia esta clase de fenómeno. La función utilizada para representar este ruido es:

En donde u es un número aleatorio entre 0 y 1 Para un α= 1 , β=0
El deterioro de una imagen con ruido impulsivo se observa en la figura No. 5
IV. FILTROS
A. FILTROS DIGITALES
Los filtros digitales se pueden usar para propósito general. De una parte, para la separación de dos señales que han sido generadas y de otra para la restauración de señales que se han distorsionado [8,9]
Los filtros digitales son importantes en el procesamiento de señales debido a su excelente desempeño. Se usan para la separación de señales cuando una señal ha sido contaminada con interferencia de ruido o con otras señales. Así, un filtro se puede usar para separar estas señales y poder estudiarlas individualmente [10]. En la figura No. 6 se muestra la imagen Lenna original, luego con ruidos gaussiano e impulsivo y finalmente al ser tratada con un filtro de media.

B. FILTROS DE MOVIMIENTO PROMEDIADO DE MÚLTIPLE PASE
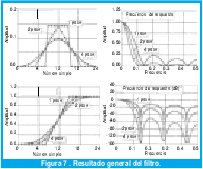
Estos filtros [11] involucran el paso de la señal de entrada a través de un filtro de movimiento promediado dos o más veces; la figura No. 7 muestra el resultado general del filtro de 1, 2 y 4 pasadas. Dos pasadas son equivalentes a usar un filtro triangular. Después de cuatro o más pasadas el núcleo del filtro equivalente se asimila a una gaussiana. Se muestra como múltiples pasadas producen una respuesta en escalón en forma de (S) comparada con la línea recta de una única pasada. Las respuestas en frecuencia están dadas por la ecuación (3) multiplicada por sí misma para cada pasada, esto es, cada convolución en el dominio del tiempo resulta de una multiplicación del espectro de la frecuencia.

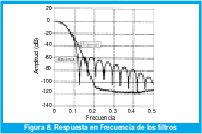
La figura No. 8 muestra la respuesta en frecuencia de otros dos filtros similares ( Blackman y Gaussiano) al movimiento promediado. Cuando se usa como núcleo del filtro una gaussiana pura la respuesta es también una gaussiana. Esta forma gaussiana es importante porque es la respuesta al impulso de muchos sistemas naturales y otros fabricados por el hombre.
Así por ejemplo, un breve pulso de luz que entra a una línea larga de transmisión de fibra óptica saldrá como un pulso gaussiano debido a los diferentes tipos de caminos tomados por los fotones dentro de la fibra. El núcleo de filtrado gaussiano es usado extensivamente en procesamiento de imágenes en razón a sus propiedades únicas que permiten la rápida convolución en dos dimensiones. La segunda respuesta en frecuencia de la figura No. 8 corresponde al uso de una ventana Blackman como núcleo del filtro. Este tipo de núcleo es similar a una gaussiana.
C. FILTRO DIFUSO MULTIPASO
La gran mayoría de los filtros difusos son modificaciones de los filtros existentes a nivel de extensiones, generalizaciones y refinamiento a filtros clásicos. Dichas modificaciones se realizan mediante el uso de reglas difusas. Puede decirse que, este tipo de filtros está dividido en aquellos cuya salida del filtro difuso depende de la salida de uno o más filtros clásicos en donde el peso o ponderación de los valores se determina usando reglas difusas o cuando la salida del filtro difuso se obtiene mediante una fórmula clásica. También se presenta otro tipo de filtros puros difusos, en estos la salida es determinada exclusivamente por reglas difusas independiente de cualquier filtro clásico.
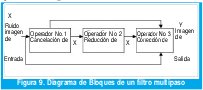
El filtro difuso multipaso es una aproximación directa para el filtrado de imágenes, usa un sistema complejo difuso dividido en tres operadores diferentes representados por tres bloques de procesamiento [12,13]. Estos bloques procesan la imagen para calcular el término de corrección necesario para eliminar el ruido aleatorio.
Siendo X una imagen de entrada digitalizada en el rango [0,L-1] (donde L es Luminancia) que se encuentra contaminada por ruido mixto (impulsivo y gaussiano); el primer operador calcula los impulsos de ruido dando como resultado la imagen X`. Esta imagen intermedia es procesada por un segundo operador diseñado para el filtrado de ruido no impulsivo. La imagen resultante de este proceso es X`` y puede ser considerada como una buena estimación de la imagen original (o datos). Sin embargo, para mejorar la exactitud de la imagen de salida Y se implementa un tercer generador de corrección de error. El diagrama de bloques del filtro multipaso se aprecia en la figura No. 9.
1. PRIMER OPERADOR: RUIDO IMPULSIVO
En el primer operador se eliminan los impulsos de ruido por medio de una serie de patrones aplicados con la ventana de procesamiento y una máquina de inferencia con composición min-max. Este operador difuso es un filtro no lineal recursivo FIRE.
Siendo X la imagen de entrada contaminada con filtro gaussiano e impulsivo, x(n) corresponde a la luminancia en el píxel de la imagen ubicado en n = (n1,n2) y W(n) = {xj(n); = 1,.....,8} la ventana de 3x3 centrada en x(n).
Las entradas para el sistema difuso son las diferencias de luminacia entre el píxel tratado y los píxeles de la ventana 3x3 correspondientes al patrón específico. La ecuación 4 señala el cálculo de las diferencias de luminancia por píxel.

El término de corrección Δ x´(n), se obtiene al pasar las diferencias de luminancia por el operador

Para detectar correctamente los impulsos de ruido (pixeles saturados) se toman los siguientes patrones que se muestran en la figura No. 10.

La idea fundamental de estos patrones es poder detectar verdaderos impulsos de ruido sobre áreas complejas, como son las fronteras entre objetos de la imagen, detalles menudos, características específicas de la imagen, entre otros. La salida Δx´(n) es evaluada numéricamente por un esquema de inferencia tipo min - max. En la ecuación ( 8 ) se señala la inferencia difusa para el cálculo del término de corrección del primer operador
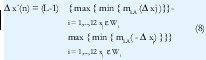
Donde mLA corresponde a la función de membresía del conjunto difuso GRANDE (LA) y se muestra en la ecuación ( 9 ).
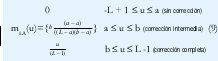
El conjunto difuso LA busca suprimir pulsos de ruidos sin arruinar los detalles finos de la imagen. La acción resultante de este operador varía gradualmente entre corrección cero hasta corrección total, dependiendo de la saturación estimada del píxel tratado. Cuando esta saturación es muy baja, no existe certeza de si efectivamente es ruido impulsivo. Por ello, se introduce un nuevo conjunto difuso MD (Medio) que permite mejorar la interpretación de los pixeles y reducir el efecto suavizante ( borroso) en los bordes. En la ecuación ( 9 ), a = b mMD(x). Este conjunto MD tiene la propiedad de permitir adaptar la preservación de los detalles de acuerdo con las características propias de la imagen tratada. Si la luminancia del píxel procesado es media, se obtiene la máxima preservación del detalle.
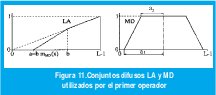
En la figura No. 11, se presentan los conjuntos difusos utilizados por el primer operador.
La función de membresía del conjunto MD es:
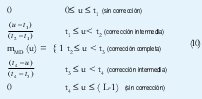
La ecuación anterior muestra el conjunto difuso de entrada MD ( Medio) y sus parámetros son:
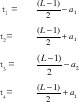
De aquí se obtiene X` que corresponde a la imagen resultante del primer operador. Nótese que la cantidad p(n) = | Δx´(n) | se puede interpretar como un estimado de la amplitud del posible impulso de ruido en la ubicación n=(n1,n2) Esta información se almacena para ser retomada en el último operador.
2. SEGUNDO OPERADOR RUIDO NO IMPULSIVO
En el segundo operador se cancela el ruido no impulsivo (ruido gaussiano o ruido uniforme ). Para ello se usa una ventana 5x5 en forma de cruz. No se usan patrones direccionales y la máquina de inferencia o regla de composición utilizada es diferente.
Este operador se encarga de manejar distribuciones de ruido de cola corta (ruido unifor me, gaussiano); su estructura se basa en el filtro WFMF (filtro difuso ponderado). Este filtro opera en una ventana de 5x5 en cruz W0(n) ={ x´j(n); = 1,...,20} que incluye los veinte pixeles vecinos. Las variables de entrada a este operador son las diferencias de luminancia Δxj´(n)=xj´(n) - x´ (n). La variable de salida Δx´´(n) lleva hacia el siguiente valor de luminancia: x´´(n) = x´(n) + Δx´´(n). La salida Δx´´(n) es evaluada numéricamente por la ecuación de membresía del conjunto difuso de entrada MD (Medio) (11).

De esta manera se disminuye el denominado ruido uniforme o Gaussiano existente en la imagen. Para ello, utiliza un conjunto "small" con un parámetro de control c que representa la longitud del conjunto difuso utilizado. En la figura No. 12 se muestra el conjunto difuso SM (pequeño).
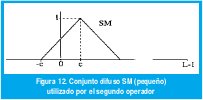
Debe notarse que este operador no utiliza patrones sobre las ventanas para disparar las reglas de inferencia, al contrario su operación es muy simple puesto que opera una gran vecindad y toma la media aritmética como operador de agregación difusa en vez de usar el mínimo como es usual. Su diseño triangular tiene que ver básicamente con el tipo de ruido que maneja. La preservación del detalle en este filtro se ajusta con el parámetro c.
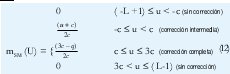
La ecuación anterior (12) muestra la función de membresía del conjunto difuso de entrada SM (Pequeño)
3. TERCER OPERADOR CORRECCIÓN DE ERRORES
El tercer operador trabaja de forma similar al primero. Explota la información generada en este primer paso correspondiente a la amplitud de los pulsos de ruido. La idea principal de este operador es trabajar sobre una imagen libre de ruido gaussiano de tal forma que corrija el error ocasionado en el primer operador al calcular los pulsos de ruido sobre una imagen contaminada de este ruido uniforme.
Debido a que el segundo operador entrega una imagen libre de ruido gaussiano, el operador de corrección de errores realiza el proceso explicado para el primer operador sobre esta imagen. Elimina así los impulsos de ruido y luego haciendo uso del mapa de impulsos obtenido (p(n)) repite la corrección de los impulsos donde haya existido saturación ( p(n) > 0). Las variables de entrada son las diferencias de luminancia Δxj ´´(n) = xj ´´(n) - x(n). La variable de salida es el término de corrección ΔΨ(v) que adicionado a x(n) permite obtener el resultado final y(n).
Es decir, este operador, cumple con el objetivo de eliminar lo que aun se identifique como ruido impulsivo.
La ecuación (13) representa la salida del tercer operador.
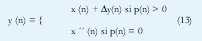
Donde la x(n) es la imagen original con ruido, Δy(n) es la corrección de la imagen, si la primera corrección es superior a cero y x"(n) es la segunda corrección.
V. SIMULACIÓN Y RESULTADOS
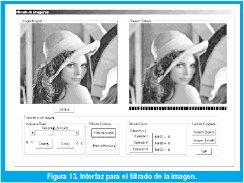
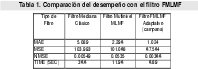
Se llevaron a cabo varias simulaciones con el objeto de comprobar los diferentes aspectos visuales del uso de las técnicas de filtrado difuso usando un programa FuzzySPdiseñado para tal fin [14]. Para ello se toma una serie de fotografías Lenna, con el objeto de verificar la funcionalidad del filtro y sus diferentes variaciones de acuerdo al uso de las diversas técnicas. La figura No. 13 muestra la interfaz para el filtrado de la imagen. En la Tabla No. 1 se presenta el análisis del desempeño del filtro. El programa implementado permite observar claramente la utilización de métodos orientados a la corrección de ruido aleatorio sobre imágenes 2D.
El procedimiento de análisis aplicado al programa es la subdivisión de sus funcionalidades jerárquicas para la reutilización de funciones y se resume en: Capturar la imagen digitalizada y convertirla en patrones de RGB, construir la matriz de valores RGB, convertir la matriz en valores YIQ, aplicación de métodos de corrección de ruido para la imagen capturada, ajustar los operadores para el método seleccionado con el fin de iterar el resultado de la imagen, observar en tiempo corto de iteracción los resultados de la aplicabilidad de cada uno de los métodos implementados, comparar la imagen original con la imagen tratada y finalmente aplicar técnicas.
Tres tipos de filtros para suprimir el ruido se comparan: el filtro mediana clásico, de baja complejidad dada su sencilla implementación; el filtro multinivel de mediana convencional MLMF; y el filtro multinivel de mediana basado en decisión difusa FMLMF. La imagen restaurada por el filtro mediana clásico aunque elimina el ruido impulsivo presenta la imagen borrosa. La imagen reconstruída mediante el filtro multinivel de mediana MLMF deja bastantes píxeles de ruido que no puede ser removido. La imagen restaurada por el filtro multinivel de mediana basado en decisión difusa FMLMF es bastante mejor que las restauradas por los dos filtros anteriores. El algoritmo utilizado en este último filtro suprime casi en su totalidad el ruido. De la tabla No. 1 se aprecia que con este algoritmo mejorado FMLMF adaptativo con forma de campana, el desempeño es mejor al presentarse valores menores a nivel de errores y su tiempo de tratamiento ser más corto.
Para obtener los errores en el análisis de los otros filtros se toman los siguientes tipos de error.
(a) (MAE) (mean average error), error de media promedio.
(b) (MSE) (mean square error), error cuadrático medio
(c) (NMSE) (normalized mean square error), error cuadrático de media normalizado.
cuyas ecuaciones se muestran en (12), (13) y (14) respectivamente.
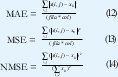
Donde Xo (i,j) es la imagen original y X(i,j) es la imagen filtrada.
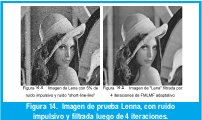
En la figura No. 14 se aprecia la imagen tanto de prueba como la filtrada mediante el filtro FMLMF adaptativo luego de cuatro iteraciones, mostrando que su restauración es bastante mejor a los filtros anteriores.
VI. CONCLUSIONES
La aplicabilidad de la lógica difusa en el campo de procesamiento de señales es inmensa. El desarrollo dado hasta hoy día es incipiente y apenas permite vislumbrar el futuro de esta rama de la ciencia.
En la selección del filtro difuso se tuvo en cuenta el tipo de algoritmo, iterativo o recursivo. En el primer caso se tiene un impacto en el tiempo computacional invertido en su procesamiento lo que no ocurre con el segundo. Así mismo, la complejidad está en relación directa con el tipo de algoritmo.
La lógica difusa demuestra así su versatilidad al ser aplicada exitosamente en el filtro implementado. Se puede ver el resultado del primer operador en donde se reduce drásticamente el nivel del ruido impulsivo y descubre detalles que no eran visibles en la imagen ruidosa así como las funciones desarrolladas por los operadores 2 y 3. La complejidad de estos operadores radica en su implementación en razón a que los costos computacionales son altos.
Los resultados obtenidos muestran que la utilización de los filtros difusos para la eliminación del ruido presenta ventajas tanto a nivel de desempeño como en la restauración de la imagen con respecto a los filtros tradicionales.
Adicionalmente, software de este tipo está limitado al rendimiento de los equipos de cómputo utilizado y determina la restricción de varias características en la imagen con el fin de conservar tiempos rápidos de respuesta y una observación más acertada sobre las pruebas efectuadas.
REFERENCIAS BIBLIOGRÁFICAS
[1] KLI George J., Yuan Bo., "FUZZY SETS AND FUZZY LOGIC". Theory and applications. Prentice Hall, 1995.
[2] Wang, Li-Xin. "ADAPTATIVE FUZZY SYSTEMS AND CONTROL". Prentice Hall, 1994.
[3] Elsevier Science. FUZZY SETS AND SYSTEM, Special issue on Fuzzy Signal Processing. Vol. 77, issue 1,15, Enero 1996.
[4] Chen C.H. , "FUZZY LOGIC AND NEURAL NETWORK HANDBOOK ", McGRAW-Hill, Inc.1996.
[5] IEEE "A FUZZY APPROACH TO 2-D SHAPE RECOGNITION", IEEE Transaction on fuzzy systems, Vol 9, No 1, 2001.
[6] Tizhoosh, Hamid R. "FUZZY IMAGE PROCESSING: INTRODUCTION TO THEORY AND PRACTICE " . SprinngerVerlang.,Octubre 1997.
[7] Gonzales R., Woods R., " DIGITAL IMAGE PROCESSING ", Addison - Weslwy Co. , 1993.
[8] Cadzow J., Martens H. " DISCRETE TIME AND COMPUTER CONTROL SYSTEMS ", Prentice Hall, 1970.
[9] Furui S. "DIGITAL SPEECH PROCESSING, SYNTESIS AND RECOGNITION ", Marcel Decker, 1989.
[10] Oppenheim Alan V., Schafer Ronald W, " DIGITAL SIGNAL PROCESSING ". Prentice Hall Inc. 1989, USA.
[11] Yang, X and S.Toh, P , "Adaptive Fuzzy Multilevel Median Filter", IEEE Transactions Image Processing,vol. 4, no. 5, 1995.
[12] Russo, F., Ramponi, G. SPLetters(3), "A FUZZY FILTER FOR IMAGES CORRUPTED BY IMPULSIVE NOISE". No. 6, June 1996, pp. 168- 170.
[13] Wang. X, "ADAPTATIVE MULTILEVEL MEDIAN FILTER", IEEE Trans. Signal Processing, Vol 4, No 4, April 1992
[14] Mujica Ballesteros A.E., " Eliminación del Ruido Aleatorio en Imágenes 2D utilizando Lógica Difusa ", Trabajo de Grado, Universidad Distrital, 2002.
Álvaro Betancourt Uscátegui
Ingeniero Electrónico, Universidad Distrital. Especialista en Telecomunicaciones Móviles, Universidad Distrital. Msc. Ciencias Financieras y de Sistemas, Universidad Central. Magister en Ingeniería, Informatique Appliquée, Ecole Polytechnique Université de Montreal, Canadá. Profesor Facultad de Ingeniería, Universidad Distrital. Coordinador de la Especialización en Telecomunicaciones Móviles Director Grupo Investigación LAMIC, abetancourt@udistrital.edu.co
Andrés Edwin Mujica Ballesteros
Ingeniero de Sistemas, Universidad Distrital Francisco José de Caldas.
Hernán Tapias
Ingeniero de Sistemas, Universidad Distrital Francisco José de Caldas. Profesor Ingeniería de Sistemas, Universidad Distrital Francisco José de Caldas.
Creation date:
License
![]()
From the edition of the V23N3 of year 2018 forward, the Creative Commons License "Attribution-Non-Commercial - No Derivative Works " is changed to the following:
Attribution - Non-Commercial - Share the same: this license allows others to distribute, remix, retouch, and create from your work in a non-commercial way, as long as they give you credit and license their new creations under the same conditions.

2.jpg)





