
DOI:
https://doi.org/10.14483/23448393.16220Published:
2020-10-05Issue:
Vol. 25 No. 3 (2020): September - DecemberSection:
Electrical and Electronic EngineeringEstudio comparativo de un sistema de freno regenerativo y regeneración con energía cinética constante en vehículos eléctricos de batería
Comparative Study of a Regenerative Braking System and Regeneration with Constant Kinetic Energy in Battery-based Electric Vehicles
Keywords:
Efficiency, electric vehicle, kinetic energy, regenerative brake, state of charge (en).Keywords:
Eficiencia, Energía cinética, Estado de carga, Frenado regenerativo, Vehículo eléctrico (es).Downloads
References
International Energy Agency. “Global EV Outlook 2019”. Technical report, International Energy Agency, 2019. https://www.iea.org/reports/global-ev-outlook-2019.
F. Un-Noor, S. Padmanaban, L. Mihet-Popa, and M. N. Mollah y E. Hossain. “A Comprehensive Study of Key Electric Vehicle (EV) Components, Technologies, Challenges, Impacts, and Future Direction of Development”. Energies, vol. 10, 2017. https://doi.org/10.3390/en10081217
E. Silvas¸, T. Hofman, and M. Steinbuch. “Review of Optimal Design Strategies for Hybrid Electric Vehicles”. IFAC Proceedings Volumes, vol. 45(30):57–64, 2012. https://doi.org/10.3182/20121023-3-FR-4025.00054
P. G. Anselma, A. Biswas, G. Belingardi, and A. Emadi. “Rapid assessment of the fuel economy capability of parallel and series-parallel hybrid electric vehicles”. Applied Energy, vol. 275:1–11, 2020. https://doi.org/10.1016/j.apenergy.2020.115319
M. F. M. Sabri, K.A. Danapalasingam, and M.F. Rahmat. “A review on hybrid electric vehicles architecture and energy management strategies”. Renewable and Sustainable Energy Reviews, vol. 53(C):1433-1442, 2016. https://doi.org/10.1016/j.rser.2015.09.036
A. M. Andwari, A. Pesiridis, R. Srithar, R. Martinez-Botas, and V. Esfahanian. “A review of Battery Electric Vehicle technology and readiness levels”. Renewable and Sustainable Energy Reviews, vol. 78(C):414–430, 2017. https://doi.org/10.1016/j.rser.2017.03.138
A. Beltrán, J. Rumbo, H. Azcaray, K. Santiago, M. Calixto, and E. Sarmiento. “Simulación y control de la velocidad y par electromagnético de un motor de inducción trifásico: Un enfoque a vehículos eléctricos”. Revista Iberoamericana de Automática e Informática industrial, vol. 16(3):308–320, 2019. https://doi.org/10.4995/riai.2019.10452
A. Cruz-Rojas, J. Rumbo-Morales, J. de la Cruz-Soto, J. Brizuela-Mendoza, F. Sorcia-Vázquez, and M. Martínez-García. “Simulation and Control of Reactants Supply and Regulation of Air Temperature in a PEM Fuel Cells System with Capacity of 50 kW”. Revista Mexicana De Ingeniería Química, vol. 18(1): 349–360, 2019. https://doi.org/10.24275/uam/izt/dcbi/revmexingquim/2019v18n1/Martinez
A. F. Pacheco, M. E. S. Martins, and H. Zhao. “New European Drive Cycle (NEDC) simulation of a passenger car with a HCCI engine: Emissions and fuel consumption results”. Fuel, vol. 111:733–739, 2013. https://doi.org/10.1016/j.fuel.2013.03.060
R. C. Redondo, M. Redondo, N. R. Melchor, F. R. Quintela, and J. M. García. “Carga de una batería y electricidad, dos términos de utilización confusa”. Técnica Industrial, N/A (257):34–39, 2005
M. K. Yoong, Y. H. Gan, G. D. Gan, C. K. Leong, Z. Y. Phuan, B. K. Cheah, and K. W. Chew. “Studies of regenerative braking in electric vehicle. In 2010 IEEE Conference on Sustainable Utilization and Development in Engineering and Technology”, pages 40–45, 2010. https://doi.org/10.1109/STUDENT.2010.5686984
W. Yu, R. Wang, and R. Zhou. “A Comparative Research on the Energy Recovery Potential of Different Vehicle Energy Regeneration Technologies”. Energy Procedia, vol. 158:2543–2548, 2019. https://doi.org/10.1016/j.egypro.2019.02.001
N. L. Hinov, D. N. Penev, and G. I. Vacheva. “Ultra Capacitors Charging by Regenerative Braking in Electric Vehicles”. Proceedings 2016 XXV International Scientific Conference Electronics (ET), pages 1–4, 2016. https://doi.org/10.1109/ET.2016.7753484
J. Hamid, R. Sheeba , and S. Sofiya. “Energy Harvesting through Regenerative Braking using Hybrid Storage System in Electric Vehicles”. Proceedings 2019 IEEE International Conference on Intelligent Techniques in Control, Optimization and Signal Processing (INCOS), pages 1–6, 2019. https://doi.org/10.1109/INCOS45849.2019.8951323
A. P. Budijono, I. N. Sutantra , and A. S. Pramono. “Development of Flywheel Regenerative Capture System to Improve Electric Vehicle Energy Captured System”. Proceedings 2019 International Conference on Information and Communications Technology (ICOIACT), pages 845–850, 2019. https://doi.org/10.1109/ICOIACT46704.2019.8938552
S. Heydari, P. Fajri, R. Sabzehgar, and A. Asrari. “Optimal Blending of Regenerative and Friction Braking at Low Speeds for Maximizing Energy Extraction in Electric Vehicles”. Proceedings 2019 IEEE Energy Conversion Congress and Exposition (ECCE), pages 6815–6819, 2019. https://doi.org/10.1109/ECCE.2019.8913117
C. Fiori, K. Ahn, and H. A. Rakha. “Power-based electric vehicle energy consumption model: Model development and validation”. Applied Energy, vol. 168:257 – 268, 2016. https://doi.org/10.1016/j.apenergy.2016.01.097
Organizacion Unece. “Worldwide harmonized Motorcycle Emissions Certification/Test procedure (WMTC) informalgroup”. Technical report, Organizacion Unece, 2011. http://www.unece.org/trans/main/wp29/wp29wgs/wp29grpe/wmtc.html
U. N. E. Comission. “Draft global technical regulation”. Technical report, United Nations, 2003. https://www.unece.org/fileadmin/DAM/trans/doc/2003/wp29grpe/TRANS-WP29-GRPE-46-inf15e.pdf
W. Saleh, R. Kumar, H. Kirby, and P. Kumar. “Real world driving cycle for motorcycles in Edinburgh”. Transportation Research Part D: Transport and Environment, vol. 14, no. 5, 326–333, 2009. https://doi.org/10.1016/j.trd.2009.03.003
U. S. E. P. Agency. “Dynamometer drive schedules”. Technical report, EPA, 2017. https://www.epa.gov/vehicle-and-fuel-emissions-testing/dynamometer-drive-schedules
The Car Connection. “Characteristics Nissan leaf the car connection 2015”. Technical report, The Car Connection, 2015. https://www.thecarconnection.com/specifications/nissan_leaf_2015_base
How to Cite
APA
ACM
ACS
ABNT
Chicago
Harvard
IEEE
MLA
Turabian
Vancouver
Download Citation
Recibido: 30 de abril de 2020; Revisión recibida: 6 de agosto de 2020; Aceptado: 18 de agosto de 2020
Resumen
Contexto:
El incremento constante en el uso de vehículos eléctricos a nivel mundial ha motivado investigaciones para mejorar la autonomía de los mismos frente vehículos de combustión tradicionales.
Este artículo presenta el estudio de un sistema de carga de batería para vehículos eléctricos basado en el movimiento constante del sistema de tracción.
Método:
Se realiza una evaluación sobre un sistema de regeneración de energía cinética constante para aumentar la autonomía de vehículos eléctricos. Esto se logra mediante la validación de un modelo matemático de consumo de energía de un vehículo eléctrico de batería con sistema de freno regenerativo, comparando mediante simulaciones los estados de consumo y carga entre los dos sistemas de recuperación de energía.
Resultados:
El vehículo con un sistema de regeneración por movimiento constante consumió 42,9% más de potencia que utilizando freno regenerativo, debido a que el nuevo sistema aumentó la masa total en el vehículo. Dicho aumento de masa, hace que se deba consumir mayor potencia por parte del sistema de tracción para mover el vehículo.
Conclusiones:
El sistema convencional de freno regenerativo resulta más favorable respecto al sistema de regeneración por energía cinética propuesto, excepto en tramos de velocidad constante y aceleración cero.
Palabras clave:
Eficiencia, energía cinética, estado de carga, frenado regenerativo, vehículo eléctrico.Abstract
Context:
The constant increase in the use of electric vehicles worldwide has motivated research to improve their autonomy compared to traditional combustion vehicles. This article presents the study of a battery charging system for electric vehicles based on the constant movement of the traction system.
Method:
An evaluation is carried out on a constant kinetic energy regeneration system to increase the autonomy of electric vehicles. This is achieved through the validation of a mathematical energy consumption model of a battery-based electric vehicle with a regenerative brake system, comparing the results of consumption and load states between the two energy recovery systems by means of simulations.
Results:
The vehicle with constant motion regeneration system consumed 42,9% more power than the one using a regenerative brake because the new system increased the total mass in the vehicle. This increase in mass means that more power must be consumed by the traction system to move the vehicle.
Conclusions:
The conventional regenerative brake system is more favorable with respect to the proposed regeneration system for kinetic energy, except in constant speed and zero acceleration sections.
Keywords:
Efficiency, electric vehicle, kinetic energy, regenerative brake, state of charge.Introducción
En los últimos años, la movilidad eléctrica se ha convertido en un área de interés tanto para la industria automotor como para la investigación. La Agencia Internacional de Energía (IEA, por sus siglas en inglés), en su informe Global EV Outlook 2019 [1], señala que durante el año 2018, el parque de vehículos eléctricos (EVs) a nivel mundial, sin considerar transporte público, llegó a 5,1 millones de unidades, un aumento del 63% respecto al año 2017. Este porcentaje es similar a la tasa de crecimiento interanual del 57% obtenido en 2017 y del 60% en 2016. De acuerdo con la IEA, los vehículos eléctricos puros representan el 64% de la flota mundial de automóviles eléctricos. Durante el año 2018, el 45% de la flota mundial de vehículos eléctricos se encontraban en la República Popular de China, el 24% en Europa, el 22% en los Estados Unidos. El resto de los países representa alrededor del 9% de los vehículos eléctricos.
Estos vehículos se clasifican principalmente en cuatro categorías [2]. El primero es el vehículo eléctrico de baterías (BEV, por sus siglas en inglés), el cual se caracteriza por emplear únicamente motor eléctrico para tracción mecánica. Está alimentado por un banco de baterías recargables, y su autonomía depende de la capacidad de las baterías instaladas; pueden dar autonomías de 100 km, en modelos económicos, y hasta 600 km en los modelos de alta gama. En segundo lugar, se tiene al vehículo eléctrico híbrido (HEV, por sus siglas en inglés), el cual mezcla la motorización con motores de dos tecnologías, uno de combustión interna y otro eléctrico. La forma de operaci ón de ambos motores depende de la configuración del vehículo (serie, paralelo y serie-paralelo); sin embargo, el motor de combustión interna opera principalmente como método de carga de baterías [3], [4], mientras que el motor eléctrico se encarga de la tracción mecánica. En tercer lugar, se tiene al vehículo eléctrico híbrido enchufable (PHEV, por sus siglas en inglés), el cual es similar al HEV, con un sistema de baterías de mayor capacidad, estas se cargan mediante conexión a la red y frenado regenerativo. Finalmente, se tiene el vehículo eléctrico con celdas de combustible (FCEV, por sus siglas en inglés), el cual es un vehículo eléctrico que tiene como principal fuente de energía, celdas de combustible de hidrógeno a alta presión. La gran diferencia de este último vehículo respecto a los anteriores, es la alta velocidad de recarga de las celdas, las cuales en ocasiones son comparables con la carga de gasolina en vehículos de combustión interna [5]- [8].
Todo este panorama ha motivado diferentes avances tecnológicos en cuanto a los sistemas de propulsión y sistemas de baterías, sus materiales y posibles configuraciones en los equipos para lograr, desde la perspectiva técnica, una mejora en la entrega de potencia y la autonomía del vehículo [9].
La autonomía es considerada una parte crítica en cualquier vehículo. Es la distancia máxima que este puede lograr con una sola recarga, por lo cual es un parámetro de mucha importancia a la hora de escoger el tipo de vehículo a comprar. Ahora, esta autonomía normalmente se ve afectada por las características del recorrido y especificaciones del EV, lo que ha hecho indispensable el desarrollo de sistemas que permitan recarga de las baterías con el auto en movimiento, sin depender de puntos de recarga en las vías [10].
Los vehículos eléctricos actuales emplean el freno regenerativo (FR), el cual es un sistema de recuperación de energía cinética que permite a partir de la acción de frenado, transformar parte de su energía cinética en energía eléctrica. Dicha energía eléctrica es almacenada en bancos de baterías o capacitores para su uso posterior [11]. Sin embargo, además de los sistemas de freno regenerativo, también ha existido otro sistema para la carga de baterías durante el movimiento. Este sistema es el alternador, el cual es una máquina eléctrica capaz de transformar energía mecánica en energía eléctrica, generando una corriente alterna mediante inducción electromagnética, y que es utilizado en vehículos convencionales de combustión interna y los vehículos híbridos para la carga de baterías en momentos de aceleración o desaceleración [11]. Como se explicó previamente, los HEV emplean este sistema para aumentar la autonomía del vehículo recargando las baterías.
Por otra parte, en la literatura especializada se reportan diferentes investigaciones en el área de regeneración de energía para vehículos eléctricos entre las que se encuentran el aprovechamiento de la energía potencial que puede ser recuperada incluyendo sistemas de almacenamiento de energía como baterías o supercapacitores [12]- [16]. Sin embargo, no existen referencias donde se reporten aplicaciones de alternadores en BEVs como sistema de regeneración independiente de la energía potencial que sea posible recuperar. Esto motiva a presentar un nuevo modelo de regeneración de energía cinética, el cual es comparado con el sistema de frenado regenerativo para una posible implementación en conjunto con este último sistema.
Modelos de sistemas de regeneración de energía en BEV
Para el planteamiento de un modelo de regeneración de energía basado en movimiento constante se deben tener en cuenta los modos de regeneración existentes y cuáles operan actualmente en los BEV. Dichos modelos se describen a continuación.
Freno regenerativo (FR)
En la actualidad, los modelos de los sistemas de regeneración de energía en los vehículos eléctricos están enfocados al empleo del FR [11]. Este sistema convierte la energía cinética del motor durante el proceso de frenado en energía eléctrica. La energía eléctrica convertida por el FR es normalmente utilizada para cargar una batería, empleando el mismo principio del alternador.
El funcionamiento del FR consiste en la utilización del motor para reducir la velocidad del automóvil al aplicar fuerza al pedal del freno. En este instante, el motor eléctrico funciona en dirección inversa, lo que reduce la velocidad del automóvil. Cuando el motor cambia de sentido de giro, empieza a actuar como generador, (Figura 1a) produciendo energía que puede emplearse en sistemas eléctricos, como la recarga de batería. Por el contrario, cuando el BEV está en condiciones de aceleración el motor gira en el otro sentido tomando energía de la batería, tal como se ilustra en la (Figura 1b).
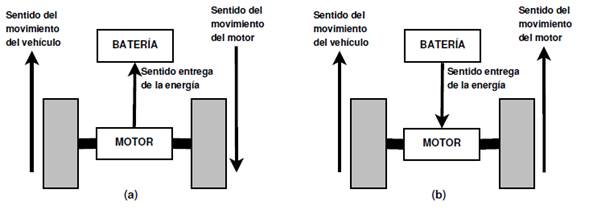
Figura 1: Diagrama de flujo de potencia en el BEV
Modelo de consumo de potencia de BEV con FR
El modelamiento de consumo de energía de un BEV consta de una serie de variables como lo son: potencia en la rueda, peso, aceleración, resistencia aerodinámica, resistencia a la rodadura, densidad del aire que depende de la humedad y temperatura del ambiente que golpea el frente del BEV, eficiencia de la transmisión y eficiencia del motor eléctrico. Este modelamiento se lleva a cabo a partir de un análisis de la potencia en la rueda a través de los diferentes elementos del ciclo de potencia, hasta llegar a la potencia que entrega la batería, la cual es mayor debido a las eficiencias de los equipos como inversores y cajas de transmisión.
La Figura 2 muestra el sentido de análisis del flujo de potencia, donde la potencia auxiliar corresponde al valor de la energía consumida por los diferentes elementos adicionales del vehículo como: aire acondicionado, iluminación exterior e interior, computadora abordo, etc. La potencia en las llantas [17] hace referencia a la potencia instantánea que requiere el vehículo para moverse a determinada velocidad, esta potencia se rige por la ecuación (1).
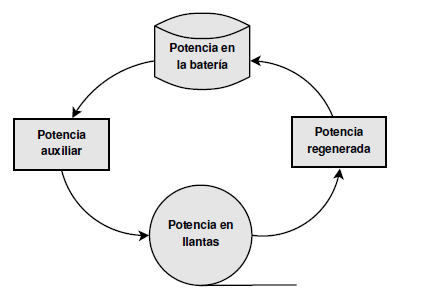
Figura 2: Diagrama de flujo de potencia en el BEV

Donde m es la masa del vehículo, a(t) es la aceleración del vehículo, g es la aceleración de la gravedad, Ө es la inclinación de la vía, c1 es un parámetro adimensional que depende de las condiciones o estado de la vía, c2 es un parámetro adimensional que depende del tipo de neumático del vehículo, Cr es un parámetro adimensional que depende del tipo de superficie de la vía, v(t) es la velocidad del vehículo, ρair es la densidad del aire, Af es el área frontal de contacto con el aire del vehículo y CD es el coeficiente aerodinámico del vehículo.
A partir de la potencia que necesitan las llantas para iniciar el movimiento, se determina la potencia eléctrica suministrada por la batería (ecuación 2), la cual contempla variables como eficiencia de transmisión ηtrans, la eficiencia de la batería ηba y la eficiencia de motor ηmotor. Cuando la aceleración es positiva, el suministro de potencia va desde la batería hacia las ruedas, y cuando la aceleración es negativa el flujo de potencia es desde las ruedas hacia la batería ello debido al FR.

En [10], se plantea la ecuación (3) de eficiencia del freno regenerativo ηrb, la cual se aplica para todo valor de aceleración a(t) negativa o frenado en el vehículo. Esta ecuación ha sido validada con datos suministrados para el Chevy Volt, donde se emplea el procedimiento federal de prueba (FTP, por sus siglas en inglés) del ciclo de conducción de la ciudad de la Agencia de Protección Ambiental para calificar el rango eléctrico total (AER, por sus siglas en inglés) del Volt con una desaceleración regenerativa máxima de 0,315 g y una eficiencia del sistema de frenado regenerativo de menos del 75 %.

La potencia del freno regenerativo (ecuación 4), es producto de la potencia de las llantas, la eficiencia del freno regenerativo y las eficiencias del sistema de transmisión y las baterías.

Con las ecuaciones anteriores, se construye el ciclo de potencia representado en la Figura 2, obteniendo así la potencia en la batería del BEV con la ecuación (5).

Modelo de SoC de BEV con freno regenerativo
El estado de carga (SoC, por sus siglas en inglés), corresponde al porcentaje de la capacidad de almacenamiento nominal de la batería, indicador principal para calcular la autonomía restante en los BEVs. Este indicador depende directamente de la potencia entregada al motor eléctrico y los sistemas auxiliares. Dicha potencia, que se toma como un valor positivo, hace que disminuya el valor de potencia en la batería durante la regeneración de energía del BEV, dado a que la potencia regenerada por los diferentes sistemas se toma como potencia negativa. El estado de carga final, (ecuación (6)) se obtiene como la diferencia entre el estado de carga inicial SoC0, tomado como el 95 %, y la sumatoria de todos los _SoCi(t) que se obtienen en cada instante de tiempo. Este cambio es la diferencia en el SoC anterior y el consumo de potencia eléctrica Pelec(i)(t) inmediato respecto a la capacidad de la batería, (ecuación (7)).


La ecuación de consumo de energía (ecuación (8)), dado en kWh/km, es el indicador más relevante para la comparación de sistemas de regeneración de energía, se obtiene al integrar la potencia que suministró la batería durante un recorrido respecto al tiempo y, dividido en los kilómetros del recorrido.

Con la ecuación (8), se realizará la comparación entre el FR y el sistema de recuperación de energía por energía cinética, para determinar cuál sistema de regeneración de energía logra tener el consumo más bajo.
Metodología de recuperación de energía en BEVs con energía cinética
La metodología propone el reemplazo del freno regenerativo en los modelos presentados en la sección anterior, por un sistema de alternador que aproveche la energía mecánica del vehículo en velocidad constante para la carga de una batería secundaria para ser utilizada como alimentación Figura 3. Metodología de comparación de sistemas de regeneración en BEV del sistema de tracción o motorización principal. La carga de la batería será monitoreada por medio del SoC en cada sistema, como se observa en la Figura 3.
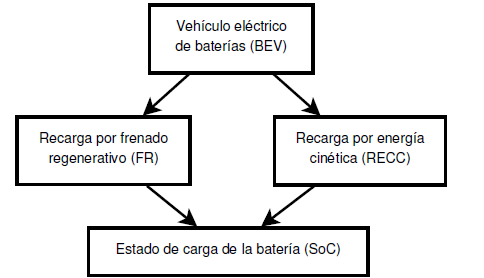
Figura 3: Metodología de comparación de sistemas de regeneración en BEV
Esta metodología busca comparar un BEV con FR con uno acondicionado a un sistema de regeneración de energía cinética constante (RECC), para así poder encontrar las condiciones que puedan ser favorables para el sistema RECC.
Modelo de recuperación de energía cinética constante
El sentido de flujo de potencia de la batería es único dependiendo de si se está entregando potencia al sistema motriz del BEV (potencia positiva), o recibiendo por un sistema de recarga o regeneración (potencia negativa). Por esta razón, no es posible que la batería entregue energía al sistema motriz al tiempo que se esté recargando por el sistema RECC. Debido a esto, se opta por la ubicación de una batería secundaria (BS), la cual será la encargada de almacenar toda la energía recuperada por el movimiento del BEV. Por tal razón, se toman a consideración tres casos diferentes donde el sistema aprovecha la regeneración de energía, es decir, tres casos diferentes donde la batería principal (BP) del sistema común de tracción del vehículo podrá aprovechar la energía almacenada de la BS o trabajar en conjunto.
Primer caso, paralelo a la entrega de potencia del sistema de FR
Debe darse una aceleración negativa (freno) suficiente para que haya un flujo de potencia negativo hacia la BP debido a la energía adquirida por los frenos regenerativos y, paralelo a ese flujo de potencia, adicionar la energía almacenada por la BS. Este caso puede ser considerado no eficiente para el sistema RECC debido a que él puede regenerar energía, aun cuando el vehículo está en desaceleración y ocasionaría un desaprovechamiento del movimiento que lleva.
Segundo caso, Energía cinética igual a cero (Ek = 0)
Corresponde a los momentos en los que el vehículo tiene una velocidad igual a cero (v(t) = 0), es decir, no existe un flujo de potencia de la BP hacia el motor y la BS tampoco tiene un flujo de potencia desde los generadores, momento preciso para una transferencia de energía eléctrica de la BS a la BP, aumentando la autonomía del vehículo sin estar conectado a un punto de carga o sometido a una regeneración de los frenos. Caso práctico en la espera de un semáforo o estacionamiento sin punto de carga de EV, pero con desventaja de una situación de un recorrido donde no incluye paradas momentáneas, desaprovechando la energía almacenada de la BS y más si se encuentra en su SoC del 100 %.
Tercer caso, Intercambio de banco de baterías
El sistema RECC es aprovechado en todo momento cuando el vehículo tiene movimiento debido a que almacena energía en la BS. Este es un caso de intercambio de batería de motorización dependiendo del SoC, como se observa en la Figura 4.
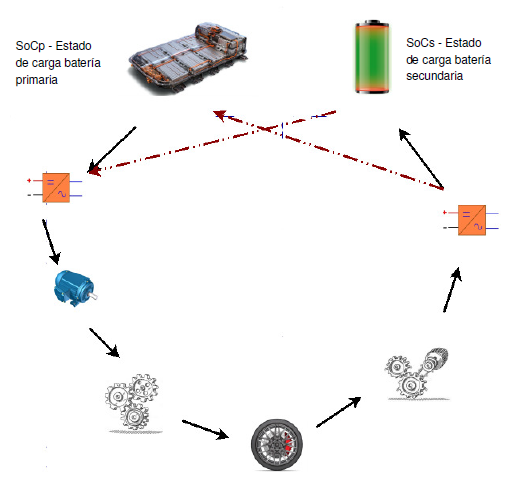
Figura 4: Ciclo de entrega de potencia según condiciones del SoCp y SoCs
El cambio entre baterías se da de la siguiente manera:
-
SoC 100% de la BS: Si el banco de baterías secundario se encuentra en su totalidad cargado, sería eficiente para el uso de la energía almacenada, hacer un cambio de posición entre la BP y la BS, dejando a la batería principal encargada de almacenar la energía del sistema RECC hasta que la batería secundaria llegue al 10% del SoC durante su uso.
-
SoC 10% de la BP: Presentada la situación de que la batería principal del BEV llegue a un nivel muy bajo, se hace el intercambio con la batería secundaria, al igual que en la situación anterior precisamente la BS se encargaría de aumentar la autonomía del vehículo gracias a la energía almacenada con anterioridad.
Para este trabajo se opta por el tercer caso para el modelamiento del sistema de regeneración de energía cinética constante en el BEV, ya que corresponde al aprovechamiento y uso más eficiente de la recarga de energía para aumentar la autonomía del BEV en un recorrido.
Energía cinética constante recuperada
La energía que alimenta al sistema RECC proviene del movimiento constante del eje del motor, el cual está alimentado por la batería, como se observa en la Figura 4. Se puede inferir que en los momentos donde se deja de acelerar, es decir, en los que el BEV va a una velocidad constante, la energía se puede expresar como la inercia del BEV donde se mantiene la cantidad de momento que lleva, pero que se va reduciendo por la interacción del vehículo con el ambiente (fricción del aire, suelo, etc.).
Para conocer cuánta energía en forma de inercia se puede aprovechar en el sistema RECC, se requiere saber la potencia en las llantas para mover el vehículo y la potencia que consume el BEV. Para esto se plantea la la ecuación (9).

Donde wEV es la energía del BEV y Peje es la energía instantánea del eje del sistema motriz del BEV aprovechable para el sistema RECC. Ahora, se calcula la potencia del eje (Peje) que puede ser aprovechada para el sistema RECC con la ecuación (10).

Por ecuaciones de energía cinética, la energía wBEV puede expresarse de la siguiente manera (ecuación 11):

La sumatoria de (12) corresponde a I = mr2, siendo m la masa del BEV y r el radio de la llanta y la velocidad angular ω es igual a v(t)/r. Por lo tanto, la energía aprovechable para el sistema RECC en forma de inercia se puede expresar de manera simple con la ecuación de energía cinética de velocidad lineal v(t). Finalmente, se tiene que:

La ecuación (13) describe cuál es la energía que sí es aprovechable cumpliendo con el balance energético, en los instantes de Pelect = 0 y que será la potencia a la entrada del generador.

Caso de estudio
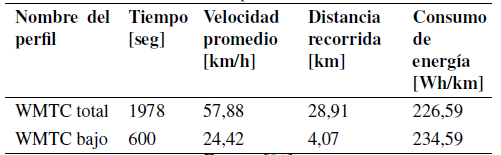
El caso de estudio aplicado para la comparación de los modelos del BEV con FR y con RECC, será un perfil de velocidad conocido como el World Motorcycle Test Cycle (WMTC) [18], [19]. Este perfil está referenciado en varios artículos como prueba de modelos [20] debido a que representa un recorrido tanto urbano como de carretera, es decir, tiene aceleraciones y desaceleraciones. Los parámetros básicos de dicho perfil se muestran en la Tabla I. El perfil de velocidad completo se muestra en la Figura 5, mientras que la Figura 6 presenta la sección de menor velocidad del perfil completo, la cual también será simulada.
Fuente: [21]
Tabla I.: Parámetros del perfil de velocidad WMTC
![Perfil completo de velocidad WMTC [21]](https://revistas.udistrital.edu.co/index.php/reving/article/download/16220/version/12123/17272/105042/0121-750X-inge-25-03-305-gf5.jpg)
Figura 5: Perfil completo de velocidad WMTC [21]
![Perfil de velocidad WMTC de baja velocidad [21]](https://revistas.udistrital.edu.co/index.php/reving/article/download/16220/version/12123/17272/105043/0121-750X-inge-25-03-305-gf6.jpg)
Figura 6: Perfil de velocidad WMTC de baja velocidad [21]
Con los perfiles descritos anteriormente, consta de dos simulaciones, las cuales se realizan en un algoritmo implementado en el paquete matemático MATLAB para el modelo del vehículo eléctrico con FR y RECC. El diagrama de flujo del algoritmo se observa en la Figura 7.
El algoritmo toma los parámetros del vehículo y el perfil de velocidad para calcular la potencia en llantas. Se calcula la aceleración y potencia en el eje dependiendo de la velocidad. La potencia del eje define si el vehículo se encuentra realmente en movimiento. Cuando se tiene aceleración mayor o igual a cero, el algoritmo calcula la potencia entregada por la batería. Cuando presenta desaceleración baja, el algoritmo calcula la energía regenerada y el SoC para el sistema RECC. Cuando el vehículo frena, es decir una desaceleración alta, el algoritmo calcula la energía regenerada y el SoC para sistema de FR. Una vez calculadas las potencias en cada sistema, se procede a obtener los resultados comparativos de energía de ambos sistemas.
Los párametros aplicados en el modelo son de un BEV Nissan LEAF modelo 2015, alimentado por una batería de Ion-Litio, los cuales se presentan en la Tabla II[22].
Fuente: Characteristics Nissan leaf the car connection 2015 [22]
Tabla II: Parámetros del perfil de velocidad WMTC
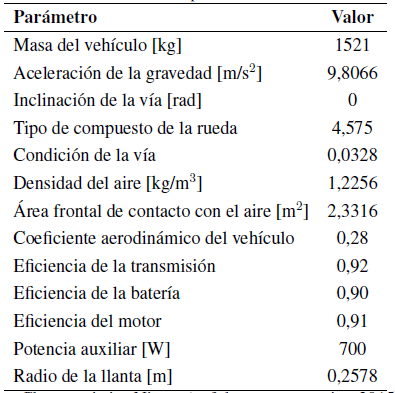
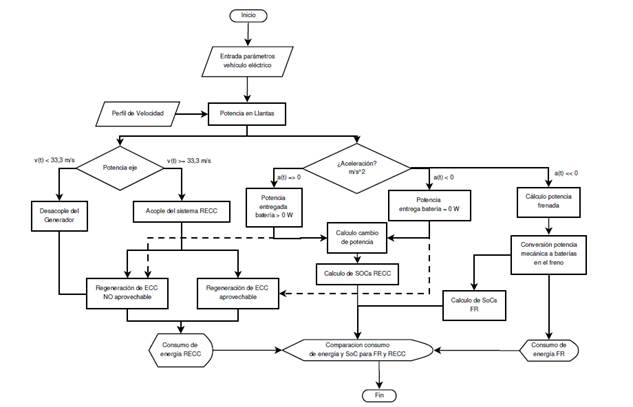
Figura 7: Diagrama de Flujo del algoritmo de cálculo del consumo de energía para el sistema RECC
Para la simulación comparativa se tienen en cuenta las siguientes consideraciones:
-
Se toma una velocidad nominal del generador estandarizada de 3600 rpm, dado que no se cuentan con datos experimentales de un generador apropiado para el sistema RECC.
-
Se asume una eficiencia común de un generador. El valor asumido es de 85% y será la eficiencia máxima de un generador, la cual depende de la velocidad mecánica aplicada en su eje.
-
La ecuación (14) es la eficiencia _ del generador será de comportamiento de curva inversa exponencial con argumento fraccionado en términos de la velocidad n, como se observa en la Figura 8.

-
Con una velocidad del generador de 3600 rpm y una máxima velocidad permitida en carretera en Colombia de 120 km/h, el valor de la relación de transformación de velocidad lineal es de r1/r2 = 2;78.
-
El BEV debe aumentar su consumo de energía por unidad de distancia, debido a un peso agregado de varios elementos necesarios para un sistema de regeneración de energía, lo que implica un aumento de 1521 kg a 2000 kg para el Nissan Leaf 2015.
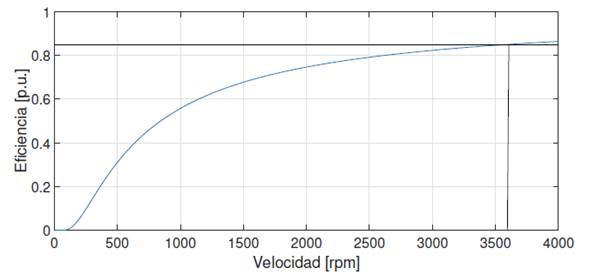
Figura 8: Curva teórica de la eficiencia del generador en función de la velocidad angular
Con el perfil WMTC se podrá visualizar el comportamiento del sistema de regeneración en recorridos de aceleración-desaceleración constante (urbano) y recorridos con altas velocidades (autopistas y similares).
Resultados
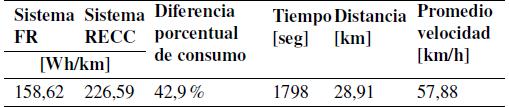
El perfil de caso de estudio (WMTC) es simulado con el sistema de regeneración constante con los siguientes resultados. La Tabla III muestra los resultados comparativos entre los dos sistemas de regeneración en las simulaciones. Se puede observar que la energía consumida por el sistema RECC aumenta en 42,9% respecto al sistema FR, debido a la masa adicional que ahora aparece en el vehículo eléctrico.
Tabla III: Resultados comparación entre FR y RECC
En la Figura 9, se puede apreciar la existencia de poca generación en la primera parte de la simulación, es decir, en la parte urbana del perfil WMTC. Sin embargo, la BS está incrementando su nivel de SoC, tal como se muestra en la Figura 10. Aproximadamente en 900 segundos, hay un incremento de la velocidad, por lo cual se evidencia aumento en la potencia generada. En este instante, el SoC de la BS llega a su valor máximo (100 %), realizando el respectivo intercambio para empezar a cargar la BP (Figura 10). En este instante, se aprecia un aumento progresivo en la generación. Con el aumento de la potencia regenerada desde el segundo 900 hasta el final del recorrido, también se observa aumento en la descarga de la BS. Hay que tener en cuenta que en estos resultados, las pérdidas eléctricas y mecánicas a la salida del generador están incluidas en la eficiencia máxima asumida para el mismo en el caso de estudio.
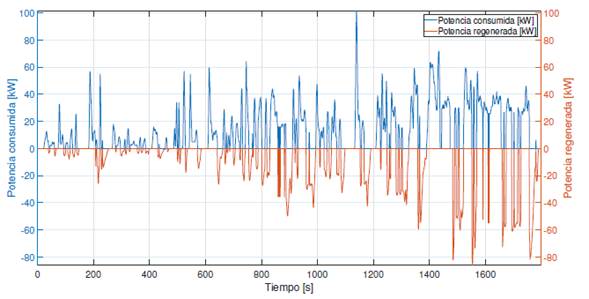
Figura 9: Consumo de potencia con regeneración por energía cinética para el perfil WMTC completo
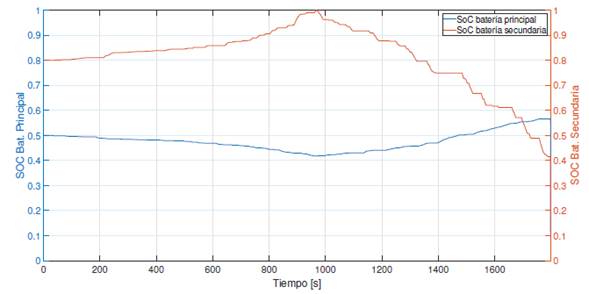
Figura 10: SoC del sistema de regeneración por energía cinética para el perfil WMTC completo
Debido a la necesidad de intercambio de baterías, se encuentra un aumento del consumo de energía del BEV con el sistema RECC, al igual que con un sistema de FR. Esto representa una poca viabilidad al sistema de generación propuesto en virtud de que el sistema de recuperación de energía busca, para un mismo perfil de velocidad, menores consumos de Wh/km, obligando a un dimensionamiento de baterías de menor capacidad para no sacrificar la autonomía del vehículo.
Los resultados de los valores máximos de la potencia entregada por la batería primaria son mayores a los encontrados en las simulaciones con el sistema FR. Esto se debe a que, cuando el BEV se encuentra acelerando, la energía entregada por la BP se debe suplir con la carga solicitada por el BEV para su movimiento y también para hacer un intercambio de energía a la batería secundaria. Es decir, no es aprovechable la energía del BEV cuando el conductor está presionando el acelerador por que su ciclo va desde la batería de suministro de potencia al motor, pasando por los diferentes elementos de los sistemas con sus correspondientes eficiencias, hasta la batería de almacenamiento de potencia convertida del generador.
El análisis del balance energético observado en la Figura 11 muestra que solo es aprovechable la inercia del BEV debida al impulso del motor eléctrico, justo en momento que deja de acelerar, por conservación del momentum, donde trasforma una velocidad angular al eje del generador como energía útil para ser almacenada en la batería primaria o secundaria (según sea el caso del intercambio de las mismas).
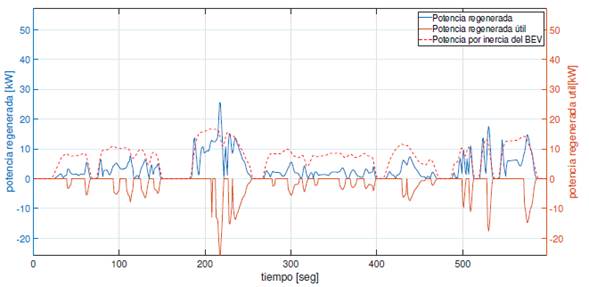
Figura 11: Gráfica de potencia en batería primaria/secundaria con perfil de velocidad traslapado
Conclusiones
En este trabajo se presenta una comparación entre un sistema de regeneración por energía cinética constante con respecto a un sistema de freno regenerativo, donde los resultados obtenidos muestran poca viabilidad en la implementación del sistema de regeneración por energía cinética constante si el recorrido empleado no tiene momentos de aprovechamiento de la inercia en el vehículo.
Cuando el recorrido presenta largos tramos, es decir, distancias con pocos cambios de velocidad como se observa en el perfil WMTC total después de los 900 segundos, donde el vehículo se mueve por inercia adquirida por el impulso del motor eléctrico, el sistema RECC puede lograr la viabilidad en la implementación. En este punto, la Figura 9 mostró una potencia regenerada mayor a la potencia consumida.
Se encontró que el sistema de regeneración de energía cinética constante aumenta en 42,9% en el consumo promedio de la energía en las baterías, debido a que el BEV tiene que recurrir a más potencia de entrega de la batería debido al aumento de peso del vehículo por la batería secundaria y el propio sistema RECC.
Los análisis realizados en este trabajo se pueden extender a otros tipos de batería utilizados en vehículos eléctricos e incluir la electrónica de potencia para tomar en cuenta la eficiencia del sistema, además de incluir información más detallada sobre las especificaciones del sistema de regeneración propuesto.
Referencias
License
Copyright (c) 2020 Ivan Camilo Duran Tovar, Agustín Rafael Marulanda Guerra, Cristian Camilo Monroy Laverde, Cristian Alejandro Siachoque Ardila

This work is licensed under a Creative Commons Attribution-NonCommercial-ShareAlike 4.0 International License.
![]()
From the edition of the V23N3 of year 2018 forward, the Creative Commons License "Attribution-Non-Commercial - No Derivative Works " is changed to the following:
Attribution - Non-Commercial - Share the same: this license allows others to distribute, remix, retouch, and create from your work in a non-commercial way, as long as they give you credit and license their new creations under the same conditions.

2.jpg)





