DOI:
https://doi.org/10.14483/23448393.18722Published:
2023-04-29Issue:
Vol. 28 No. 2 (2023): May-AugustSection:
Electrical, Electronic and Telecommunications EngineeringControlador de carga MPPT con método de estimación del estado de carga basado en conteo de amperios hora y voltaje a circuito abierto
MPPT Charge Controller with State of Charge Estimation Method based on Ampere-Hour Counting and Open Circuit Voltage
Keywords:
charge controller, maximum power point tracking, off-grid PV systems (en).Keywords:
seguimiento del punto de máxima potencia, controlador de carga, sistemas Fotovoltaicos desconectados (es).Downloads
References
UPME, “Plan indicativo de expansión de cobertura de energía eléctrica 2013 - 2017”, Unidad de Planeación Minero Energética, 2013. [En línea]. Disponible en: https://www1.upme.gov.co/Documents/Libro_PIEC.pdf
A. K. Pandey, V. V. Tyagi, J. A. Selvaraj, N. A. Rahim y S. K. Tyagi, “Recent advances in solar photovoltaic systems for emerging trends and advanced applications”, Renew. Sustain. Energy Rev., vol. 53, pp. 859-884, 2016. https://doi.org/10.1016/j.rser.2015.09.043 DOI: https://doi.org/10.1016/j.rser.2015.09.043
A. Goetzberger y V. U. Hoffmann, Photovoltaic solar energy generation, SSOS, vol. 112, Berlín, Alemania: Springer, 2005.
V. Salas, E. Olías, A. Barrado y A. Lázaro, “Review of the maximum power point tracking algorithms for stand-alone photovoltaic systems”, Sol. Energy Mater. Sol. Cells, vol. 90, no. 11, pp. 1555-1578, 2006. https://doi.org/10.1016/j.solmat.2005.10.023 DOI: https://doi.org/10.1016/j.solmat.2005.10.023
M. Pathare, V. Shetty, D. Datta, R. Valunjkar, A. Sawant y S. Pai, “Designing and implementation of maximum power point tracking solar charge controller”, 2017 Int. Conf. Nascent Technol. Eng. ICNTE 2017 - Proc., 2017, art. 7947928. https://doi.org/10.1109/ICNTE.2017.7947928 DOI: https://doi.org/10.1109/ICNTE.2017.7947928
M. A. Laguado Serrano, E. A. Luna Paipa, L. F. Bustos Márquez y S. B. Sepúlveda Mora, “Performance comparison between PWM and MPPT charge controllers”, Sci. Tech., vol. 24, no. 1, pp. 6-11, 2019. https://doi.org/10.22517/23447214.20681 DOI: https://doi.org/10.22517/23447214.20681
S. Salman, X. Ai y Z. Wu, “Design of a P-&-O algorithm based MPPT charge controller for a stand-alone 200W PV system”, Prot. Control Mod. Power Syst., vol. 3, 2018. https://doi.org/10.1186/s41601-018-0099-8 DOI: https://doi.org/10.1186/s41601-018-0099-8
M. Arsalan, R. Iftikhar, I. Ahmad, A. Hasan, K. Sabahat y A. Javeria, “MPPT for photovoltaic system using nonlinear backstepping controller with integral action”, Sol. Energy, vol. 170, pp. 192-200, 2018. https://doi.org/10.1016/j.solener.2018.04.061 DOI: https://doi.org/10.1016/j.solener.2018.04.061
J. de D. Nguimfack-Ndongmo et al., “Nonlinear neuro-adaptive MPPT controller and voltage stabilization of PV Systems under real environmental conditions”, Energy Rep., vol. 8, pp. 1037-1052, 2022. https://doi.org/10.1016/j.egyr.2022.07.138 DOI: https://doi.org/10.1016/j.egyr.2022.07.138
A. S. Saidi et al., “A novel approach in stand-alone photovoltaic system using MPPT controllers & NNE”, Ain Shams Eng. J., vol. 12, no. 2, pp. 1973-1984, 2021. https://doi.org/10.1016/j.asej.2021.01.006 DOI: https://doi.org/10.1016/j.asej.2021.01.006
M. H. Rashid, Electrónica de potencia, Hoboken, NJ, USA: Prentice Hall, 2001.
D. Choudhary y A. R. Saxena, “DC-DC buck-converter for MPPT of PV System”, Int. J. Emerg. Technol. Adv. Eng., vol. 4, no. 7, 2014. http://read.pudn.com/downloads788/doc/project/3116266/Incremental%20Conductance%20%20MPPT.pdf
A. S. Werulkar y P. S. Kulkarni, “Design of a constant current solar charge controller with microcontroller based soft switching buck converter for solar home lighting system”, 2012 - IEEE Int. Conf. Power Elec. Drives Energy Syst. (PEDES), 2012, art. 6484337. https://doi.org/10.1109/PEDES.2012.6484337 DOI: https://doi.org/10.1109/PEDES.2012.6484337
D. Sera, L. Mathe, T. Kerekes, S. V. Spataru y R. Teodorescu, “On the perturb-and-observe and incremental conductance mppt methods for PV systems”, IEEE J. Photovoltaics, vol. 3, no. 3, pp. 1070-1078, 2013. https://doi.org/10.1109/JPHOTOV.2013.2261118 DOI: https://doi.org/10.1109/JPHOTOV.2013.2261118
R. Garraoui, M. Ben Hamed y L. Sbita, “Comparison of MPPT algorithms for DC-DC boost converters based PV systems using robust control technique and artificial intelligence algorithm”, 2015 IEEE 12th Int. Multi-Conf. Syst. Signals Devices (SSD15), 2015, art. 7348163. https://doi.org/10.1109/SSD.2015.7348163 DOI: https://doi.org/10.1109/SSD.2015.7348163
S. Piller, M. Perrin y A. Jossen, “Methods for state-of-charge determination and their applications”, J. Power Sources, vol. 96, no. 1, pp. 113-120, 2001, https://doi.org/10.1016/S0378-7753(01)00560-2 DOI: https://doi.org/10.1016/S0378-7753(01)00560-2
C. D. Burgos Mellado, “Estimación del estado de carga para un banco de baterías basada en modelación difusa y filtro extendido de Kalman,” tesis de maestría, Univ. de Chile, 2013. https://repositorio.uchile.cl/handle/2250/114516
Schneider Electric, “Schneider electric handbook for solar installers”, 2022. [En línea]. Disponible en: https://download.schneider-electric.com/files?p_Doc_Ref=Solar-Installer-Handbook_UL&p_enDocType=Brochure&p_File_Name=20230120-Solar-Installer-Handbook_UL.pdf
How to Cite
APA
ACM
ACS
ABNT
Chicago
Harvard
IEEE
MLA
Turabian
Vancouver
Download Citation
Recibido: 23 de octubre de 2021; Revisión recibida: 6 de septiembre de 2022; Aceptado: 17 de noviembre de 2022
Resumen
Contexto:
Los sistemas fotovoltaicos desconectados de la red son una de las principales alternativas para suplir la necesidad de electricidad en zonas rurales donde la conexión a los sistemas tradicionales de electrificación no es posible. Entre los componentes del sistema fotovoltaico, el controlador de carga debe adaptar los niveles de corriente y voltaje para almacenar en baterías la energía entregada por los paneles.
Método:
En este trabajo se implementó y evaluó un controlador de carga de seguimiento del punto de máxima potencia (MPPT) basado en la técnica de perturbación y observación (P&O). Adicionalmente, se estimó el estado de carga de la batería combinando los métodos de conteo de amperios-hora y voltaje de circuito abierto. El controlador implementa un algoritmo de carga de dos fases para baterías de ácido-plomo.
Resultados:
El controlador de carga desarrollado obtuvo una eficiencia promedio de 84,7 % y alcanzó un valor máximo de 96,3 %. Adicionalmente, el algoritmo de carga de dos fases y el método de estimación del estado de caga implementados en el controlador permitieron un control adecuado y monitoreo de los procesos de carga y descarga de la batería.
Conclusiones:
El controlador de carga propuesto sigue el punto de máxima potencia del panel solar y permite almacenar energía en baterías de ácido-plomo a la vez que monitorea el estado de carga de estas.
Palabras clave:
controlador de carga, seguimiento del punto de máxima potencia, sistemas Fotovoltaicos desconectados..Abstract
Context:
Off-grid photovoltaic systems are one of the main alternatives to fulfill the need for electricity in rural areas where the connection to traditional electrification systems is not possible. Among the components of a photovoltaic off-grid system, the charge controller must adapt the voltage and current levels to store the energy delivered by the panels in batteries.
Method:
In this work, a maximum power point tracking (MPPT) charge controller based on the Perturbation and Observation (P&O) technique was implemented and evaluated. Additionally, the state of charge of the battery was estimated by combining the ampere-hour counting method and the open-circuit voltage. The controller implements a two-phase charging algorithm for lead-acid batteries.
Results:
The developed charge controller obtained an average efficiency of 84,7% and reached a maximum value of 96,3%. In addition, the two-phase charging algorithm and the state of charge estimation method implemented in the controller allowed for the adequate control and monitoring of the battery charging and discharging processes.
Conclusions:
The proposed charge controller follows the maximum power point of the solar panel and allows storing energy in lead-acid batteries while supervising their state of charge.
Keywords:
charge controller, maximum power point tracking, off-grid PV systems.Introducción
La energía solar fotovoltaica es una de las principales fuentes de energía renovables para la mitigación del cambio climático. Entre sus ventajas se encuentra el hecho de que no requiere ser extraída del suelo como los combustibles fósiles, no debe transportada hasta el lugar de uso, no emite gases de efecto invernadero ni ruido, no precisa de un combustible para su funcionamiento, no necesita grandes estructuras para su implementación y el mantenimiento es mínimo, por lo cual produce un impacto ambiental muy bajo 1, 3.
Los sistemas solares fotovoltaicos se pueden clasificar con base en la forma en la que interactúan con la carga en: desconectados de la red, conectados a la red e híbridos. Los sistemas fotovoltaicos desconectados de la red eléctrica (también llamados autónomos) surgen como alternativa de solución energética para aquellos lugares en los que es inviable técnica y económicamente conectar a los usuarios a redes eléctricas 3, 4. En este sentido, un sistema fotovoltaico autónomo cuenta, a grandes rasgos, con los siguientes componentes: arreglo de paneles solares, banco de baterías, controlador de carga e inversor -este último, cuando se quiere alimentar cargas de corriente alterna.
Por otro lado, el controlador de carga es uno de los principales componentes de los sistemas fotovoltaicos (SFV) autónomos, toda vez que es el encargado de transferir energía desde el panel solar hacia la batería, evitando situaciones de sobrecarga o sub-carga. Los controladores de carga se dividen principalmente en Pulse Width Modulation (PWM) y Maximum Power Point Tracking (MPPT). Los controladores de carga PWM conectan directamente el panel solar con la batería y tienen una eficiencia alrededor del 70 %, mientras que los MPPT buscan extraer la máxima potencia del panel solar mediante algoritmos que lleven a estas condiciones de operación y circuitos de electrónica de potencia de alta eficiencia 4.
En este trabajo se implementó un SFV autónomo conformado por cuatro bloques: arreglo fotovoltaico, controlador de carga, batería y carga 5. El arreglo fotovoltaico corresponde a un panel solar de potencia pico de 30 W y con punto de máxima potencia en 18 V y 1,667 A. El controlador de carga cuenta con un microcontrolador PIC16F887 que permite el seguimiento del punto de máxima potencia mediante el algoritmo de perturbación y observación (P&O). Con respecto a la batería, se utilizó una de ácido plomo Air Glass Mat (AGM) de voltaje nominal de 12 V y con capacidad de 18 Ah. Por otro lado, la carga utilizada es una lámpara led de 6 W. Finalmente, el sistema desarrollado cuenta con una autonomía de dos días, una profundidad de descarga de la batería del 50 % y una eficiencia promedio del 84,7 %. El sistema fotovoltaico desarrollado opera de la siguiente manera: el controlador de carga interactúa con el panel solar para extraer la producción energética, transfiere la energía eléctrica hacia la batería, evitando sobrecargas, y, en condiciones óptimas de operación para la batería (estado de carga suficiente), permite que la carga sea alimentada.
Con respecto a investigaciones similares, en 5 se desarrolló un sistema fotovoltaico autónomo para la alimentación de pequeñas cargas en DC, el sistema tenía una capacidad máxima de 50 W de producción energética y contaba con un convertidor DC-DC tipo reductor para el controlador de carga.
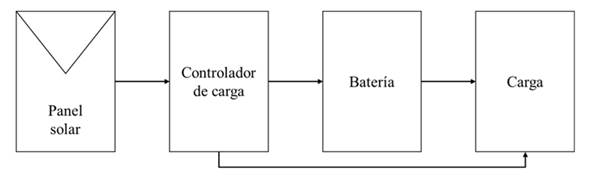
Figura 1: Diagrama de bloques de un sistema fotovoltaico autónomo
Los resultados del presente trabajo con los de 5 se diferencian en la inclusión de la eficiencia promedio del controlador; la estimación del estado de carga para baterías, que en este trabajo consistió en la fusión de dos métodos de estimación de carga (voltaje a circuito abierto y conteo de amperios-horas); y la protección contra sobrecargas y descargas profundas mediante el análisis de variables de corriente y voltaje y no solo mediante dispositivos de protección.
Los resultados del presente trabajo con los de 5 se diferencian en la inclusión de la eficiencia promedio del controlador; la estimación del estado de carga para baterías, que en este trabajo consistió en la fusión de dos métodos de estimación de carga (voltaje a circuito abierto y conteo de amperios-horas); y la protección contra sobrecargas y descargas profundas mediante el análisis de variables de corriente y voltaje y no solo mediante dispositivos de protección.
El controlador de carga MPPT presentado en este estudio fue comparado con un controlador de carga PWM bajo las mismas condiciones de radiación, generador fotovoltaico, batería y carga 6. El controlador MPPT propuesto demostró una mayor eficiencia. Los autores de 7 propusieron el diseño de un controlador MPPT, pero solo con convertidor DC/DC reductor, y también los compararon con un controlador de carga PWM. La eficiencia máxima reportada en el controlador MPPT fue de 92,6 %, mientras que la eficiencia máxima en este estudio fue de 96 %.
En otros estudios se han propuesto algoritmos MPPT más complejos. Por ejemplo, en 8 diseñaron un controlador MPPT no lineal de paso hacia atrás y lo compararon con controladores de lógica difusa y de perturbación y observación. Se propusieron controladores MPPT basados en redes neuronales en 9 y 10. Sin embargo, todos estos algoritmos avanzados han sido reportados como simulaciones en Matlab y no implementados en hardware real como el que se describe en este trabajo.
Metodología
Arquitectura del controlador de carga
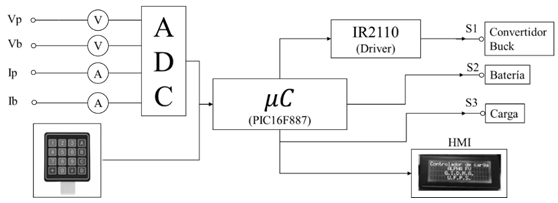
En la Fig. 2 se muestra la arquitectura del controlador de carga que tiene como componente central el microcontrolador PIC16F887. Esta captura los valores de voltaje y corriente del panel solar y la batería a través del convertidor analógico a digital (ADC) que se conecta con los sensores de corriente y voltaje. Se utiliza el circuito integrado IR2110 para lograr la operación del convertidor DC/DC tipo Buck, debido a la baja diferencia de tensión entre el panel solar y la batería. El controlador de carga cuenta con un teclado matricial de 4x4 y una interfaz humano-máquina (HMI, por sus siglas en inglés) compuesta por una pantalla LCD de 4x20. Las salidas S2 y S3 se conectan a dos interruptores, uno para verificar el estado de carga inicial de la batería y otro encargado de conectar o desconectar la carga dependiendo de la energía almacenada en la batería
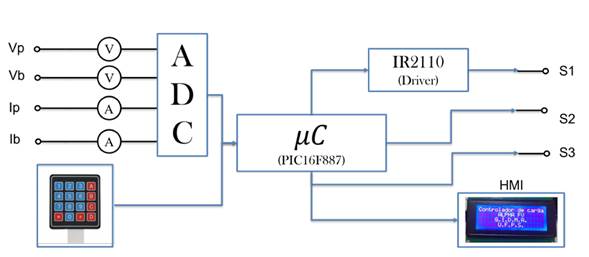
Figura 2: Arquitectura del controlador de carga
El diagrama esquemático del controlador de carga se muestra en la Fig. 3, en la cual se diferencian (de izquierda a derecha) la conexión del arreglo fotovoltaico, el convertidor DC/DC tipo Buck, la conexión de la batería y de la carga. En el diagrama se señalan los interruptores S2 y S3 encargados de la prueba del estado inicial de la batería y la conexión de la carga, los cuales fueron mencionados anteriormente.
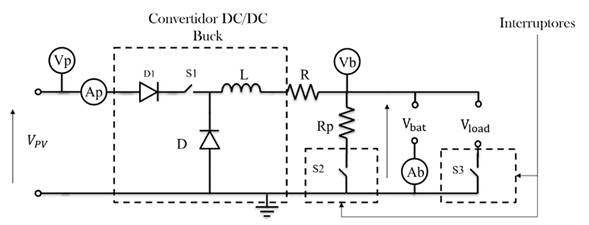
Figura 3: Diagrama esquemático del controlador de carga
Selección del microcontrolador y sensores
Se seleccionó el microcontrolador PIC16F887 de Microchip debido a que cuenta con 26 pines de entrada-salida, dos módulos de CCP (captura, comparación y PWM) y un módulo ADC con 14 canales. Además, tiene la capacidad de almacenar variables flotantes y de caracteres (debido al uso de la pantalla LCD y el teclado) y permite guardar en memoria ROM los datos correspondientes a la contraseña del equipo.
Debido a que la lectura del conversor analógico digital del microcontrolador es una transducción a valores de tensión, se decidió implementar sensores de corriente basados en efecto Hall. Estos operan con bajo consumo de energía y voltajes de 5 V, lo cual facilitó su implementación. En este trabajo se utilizaron dos sensores de corriente: uno para la corriente enviada desde el panel FV y otro para la corriente que circula a través de la batería. Por lo cual se seleccionó un sensor de corriente ACS714x05B y un sensor de corriente ACS714x20A, que son para lecturas de corriente máxima de 5 A y 20 A respectivamente.
El sensor de voltaje se basa en un divisor de tensión y, para retener este valor en la entrada, se utiliza un capacitor en paralelo con la salida. Con respecto a los sensores de corriente, los sensores de efecto Hall miden corriente de manera bidireccional y, en este caso, su salida es un valor de tensión comprendido entre 0 y 5 V, donde 0 A corresponde a una salida de 2,5 V
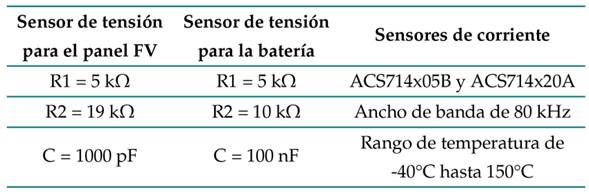
En la Tabla I se resumen los componentes de cada sensor de voltaje y las características principales de los sensores de corriente.
Tabla I: Parámetros de los sensores
Convertidor DC-DC tipo Buck
El convertidor DC/DC reductor tiene como característica la reducción de la tensión de entrada, transportando la potencia desde la fuente hacia la carga con una alta eficiencia. Este convertidor se compone por un diodo, un interruptor conmutado (generalmente un MOSFET o un IGBT) y un filtro LC para adecuar la señal de salida a la requerida por la carga 11, 13.
En la Fig. 4 se muestra el convertidor DC/DC propuesto, el cual consta de un diodo D1 que evita el flujo de corriente desde la batería hacia el panel solar en horas de baja radiación, un interruptor conmutado S, un diodo D2 como interruptor fijo, un filtro de corriente L y una resistencia R encargada de limitar la corriente de salida del convertidor. Nótese que no se utiliza un capacitor a la salida del convertidor DC/DC debido a que la carga es una batería y esta mantendrá una tensión de salida en DC aproximadamente fija que aumentará a medida que la batería cargue, por lo cual este se hace innecesario.
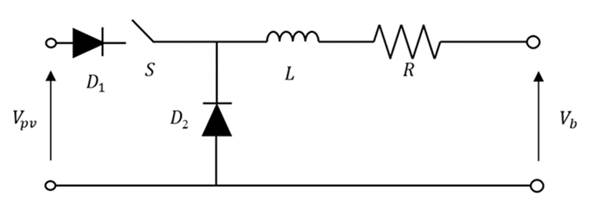
Figura 4: Convertidor DC/DC reductor propuesto
Diseño del convertidor DC-DC
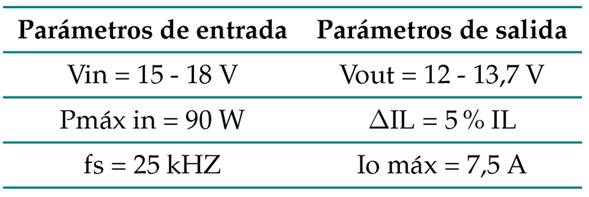
Para la fase de diseño, se establecieron los parámetros de entrada y salida del convertidor (ver Tabla II). Estos están definidos por la potencia máxima que debe transportar el convertidor, la variación de la tensión de entrada entre el valor mínimo permitido y la tensión en el MPP. La frecuencia de los interruptores se seleccionó en 25 kHz para dar un tiempo de respuesta óptimo al algoritmo. El filtro de salida se diseñó con base en la tensión que presentará la batería entre las fases de carga, desde un nivel de descarga del 50 % hasta la tensión de flotación.
Tabla II: Parámetros del convertidor DC/DC tipo Buck
El valor de inductancia mínima requerida para el filtro L se define según (Ec. 2) 11. La Ec. (1) determina el valor de la relación de trabajo del interruptor S como la razón entre la tensión de salida y la tensión de entrada. La tensión de entrada será la entregada por el panel solar, mientras que la tensión de salida será la suma de la tensión de salida exigida por la batería y la tensión que cae en el diodo.


Sustituyendo (1) en (2) y reemplazando los valores se obtiene una inductancia mínima de 333,3 µH. Para la construcción del inductor se utilizó un núcleo E-E y conductor de cobre calibre AWG 16.
Selección de dispositivos para el convertidor DC-DC
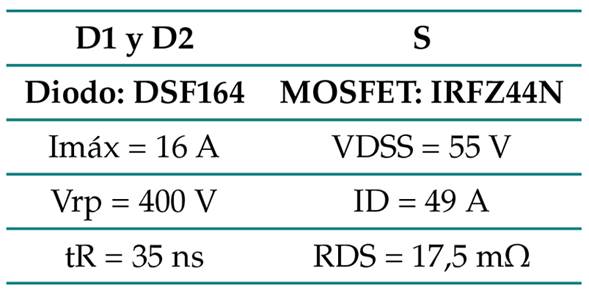
El convertidor reductor está compuesto por dos interruptores, uno controlado y uno no controlado (S y D2, respectivamente). El interruptor S debe presentar una caída de tensión baja, por lo cual su resistencia de activación debe ser de bajo valor. Con base en las características del controlador y la corriente máxima de entrada en este, que es de 5 A conmutando a una frecuencia de 25 kHz, se escogió el MOSFET IFRZ44N.
Para D1 y D2, se debe considerar que D1 es un diodo de bloqueo, el cual debe soportar la corriente máxima de entrada al polarizarse, así como la tensión de polarización en inversa máxima, correspondiente al voltaje a circuito abierto máximo permitido, es decir 24 V. Adicionalmente, debe presentar una baja caída de potencial, comprendida entre 0,5 V y 1 V. Con respecto a D2, se debe tener en cuenta la frecuencia de conmutación del convertidor y la corriente promedio que lo atravesará, la cual es de aproximadamente 8 A. Por ello, D2 debe ser un diodo de conmutación rápida con un corto tiempo de recuperación inversa. Por lo anterior, para ambos interruptores se escogió el diodo SF164.
Tabla III: Interruptores seleccionados
Funcionamiento del controlador de carga
El funcionamiento del controlador de carga se describe en la Fig. 5 y consiste en varias funciones que permiten la carga o descarga de la batería, así como la estimación del estado de carga, las cuales se explicarán a detalle en las siguientes secciones. De manera general, el controlador de carga sigue estos pasos: se debe ingresar la capacidad de la batería de ácido de plomo. Con esto, se estima el estado de carga (State of Charge, SOC) inicial. Luego, se procede a medir los valores de voltaje y corriente en la batería y el panel solar a través de los sensores para determinar si el panel está en capacidad de entregar energía a la batería. Después de esto, se valida si la batería debe ser cargada al comparar el voltaje de la batería con el de absorción (este voltaje corresponde a un SOC aproximado de 80 % y, para baterías de ácido plomo, es de aproximadamente 14,25 V). Se procede a aplicar el método de carga de dos fases o el método de descarga según la respuesta obtenida y, para finalizar, se estima el estado de carga actual con base en el método de conteo de amperios- hora y se reinician las mediciones de voltaje y corriente en batería y panel para monitorizar el estado de carga de la batería y el funcionamiento del sistema.
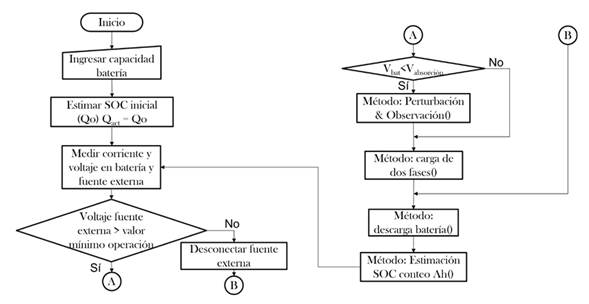
Figura 5: Algoritmo general de funcionamiento del controlador
Método de perturbación y observación para el MPPT
El método de seguimiento del punto de máxima potencia mediante perturbación y observación (Fig. 6) consiste en modificar el voltaje del panel solar variando el ciclo de trabajo del convertidor DC/DC, observar la variación de potencia y decidir si aumentar o disminuir el voltaje, dependiendo de si la variación de potencia fue positiva o negativa. En caso de que la variación sea positiva y se esté a la izquierda del punto de máxima potencia (MPP, por sus siglas en inglés), se debe aumentar el voltaje para moverse a la derecha de la curva de potencia. En caso de estar a la derecha del MPP, se debe disminuir el voltaje y, en caso de que la variación sea negativa y se esté a la derecha del MPP, se debe disminuir el voltaje para moverse a la izquierda de la curva. Finalmente, si está a la izquierda del MPP, se debe aumentar el voltaje. Este proceso se repite de manera continua hasta obtener variaciones mínimas, en la cuales, se considera, está el MPP del panel solar 14, 15.
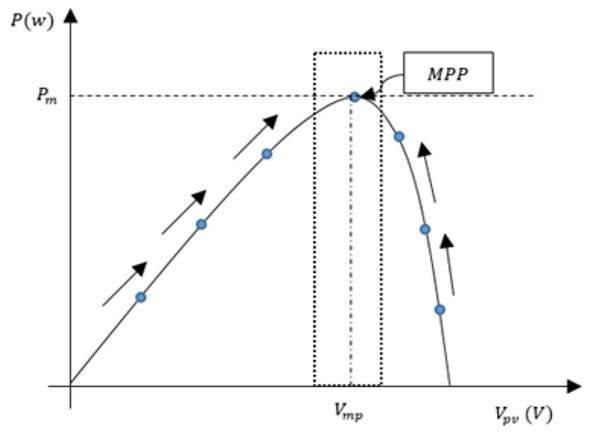
Figura 6: Método de perturbación y observación para el MPPT
El algoritmo de perturbación y observación desarrollado se expone en la Figura 6. Primero, se calcula la potencia del panel solar y se determina el delta de potencia con la potencia anterior y la actual. Este proceso se repite para los valores de voltaje del panel solar. A continuación, se valida que el delta de potencia calculado sea menor a un umbral mínimo y, en caso de ser inferior, se iguala con el valor de potencia y voltaje. En este punto, el algoritmo terminaría, pues se ha encontrado el punto de máxima potencia.
En caso de que la diferencia de potencia anterior y actual (∆P) sea mayor que el umbral mínimo, se valida si el voltaje estaba aumentando o disminuyendo, y si la potencia entregada estaba variando de igual manera sobre la curva de potencia versus voltaje. En caso de requerir mayor voltaje, se aumenta el ciclo de trabajo y, en caso contrario, se disminuye. En ambos casos, se valida que el ciclo de trabajo calculado se encuentre en los límites de operación, igualándose al valor mínimo o máximo según corresponda. Después de estas validaciones, se igualan la potencia y el voltaje anterior a los valores actuales, y se termina el método de perturbación y observación.
Método de estimación del estado de carga
Para estimar el estado de carga de la batería, se combina el método de estimación de voltaje a circuito abierto y el método de conteo de amperios-hora 16, 17. Con el valor de la capacidad nominal de la batería ingresado por el usuario, y conectando una resistencia de prueba en paralelo con la batería, el algoritmo estima un estado de carga inicial, toda vez que exista una relación lineal entre el voltaje a circuito abierto y el estado de carga. El método de conteo de amperios-hora mide la corriente que fluye desde y hacia la batería y la multiplica por un diferencial de tiempo para determinar la carga que ingresa o sale de esta (Figura 7).
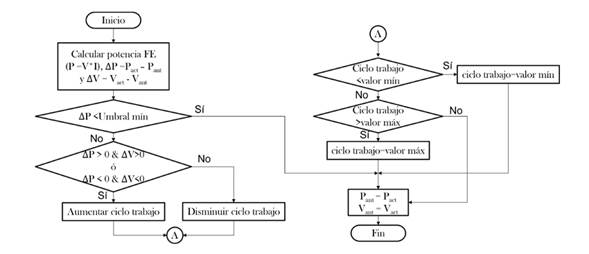
Figura 7: Algoritmo del método de perturbación y observación
Para esto se calcula la corriente en la batería para cada intervalo de tiempo (∆t) y se multiplica por la duración de este. Los valores obtenidos se convierten a unidades de Ah, como se muestra en la Ec. (3).

∆Q es un delta de carga que indicará si entra o sale carga de la batería, dependiendo de la dirección de la corriente. Si la corriente ingresa a la batería, se considera positiva y, en caso contrario, negativa. De esta manera, ∆Q representa un valor positivo o negativo en Ah, dependiendo de si se carga o descarga la batería respectivamente.
Por lo tanto, el estado de carga actual de la batería se calcula como la suma del valor de carga actual más el delta de carga (Qact = Qact ± ∆Q), y el estado de carga será el valor de carga actual en amperios-hora multiplicado por un factor de conversión, lo que lo lleva a un valor porcentual. También se incluye un condicional de este método que permite llevar el estado de carga en memoria a 100 % en caso de que sea calculado por encima de este valor.
Métodos de carga y descarga
El método de carga de la batería consta de dos fases, como se describe en 18. En la primera fase, el voltaje de carga se mantiene constante, mientras que en la batería aumenta hasta llegar al voltaje de absorción (segunda fase). Alcanzado el voltaje de absorción, este valor se mantiene constante mientras que la corriente que ingresa a la batería disminuye de forma exponencial y, finalmente, cuando la corriente que ingresa a la batería es menor al 2 % de la capacidad nominal de esta, se considera que la batería ha cargado por completo.
En la Figura 8 se muestra el algoritmo de carga. Inicialmente se pregunta si el estado de carga es del 100 % o superior (esta pregunta se debe a que al estimar el SOC podría darse un valor mayor que 100 % y el algoritmo debe detener el uso de la fuente externa), o si la corriente de carga es menor al 2 % de la capacidad nominal (carga completa), o si esta es superior al 20 % de la capacidad nominal. Esta última condición evita sobrecargas y, por lo tanto, la reducción del tiempo de vida útil de la batería. Si cualquiera de estas condiciones se cumple, el algoritmo desconecta el panel solar.
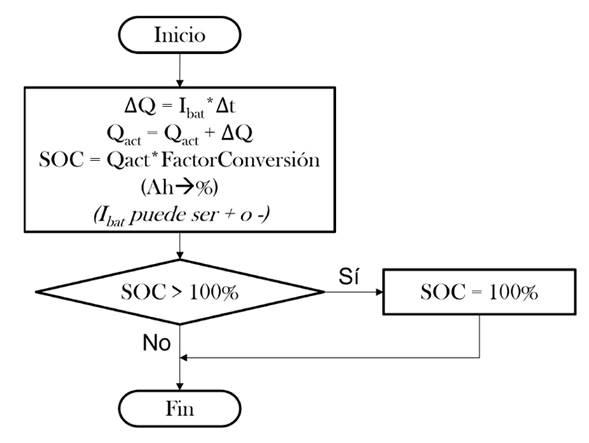
Figura 8: Algoritmo de estimación del SOC
En caso de que se presenten las condiciones permitidas para cargar la batería, el algoritmo evalúa si se alcanzó el voltaje de absorción, pues, de ser el caso, el ciclo de trabajo del convertidor debe disminuirse para mantener este voltaje en la batería y reducir la corriente que ingresa a esta.
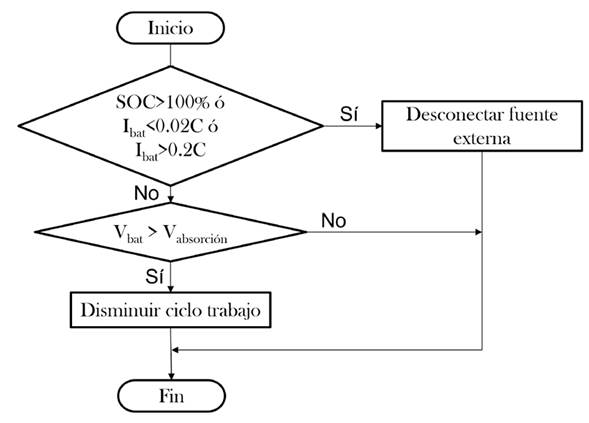
Figura 9: Algoritmo de carga de dos fases de la batería
El algoritmo de descarga (Fig. 10) condiciona la extracción de energía de la batería a los siguientes casos: que el voltaje en la batería sea el mínimo de operación para la carga, que el estado de carga no sea inferior al 50 % o que la corriente exigida por la carga no sea superior al 40 % de la capacidad nominal, pues esto conllevaría a una descarga demasiado rápida y reduciría la vida útil de la batería. Si cualquiera de estas condiciones se cumple, el algoritmo desconecta la carga y, en caso contrario, permite el suministro de energía.
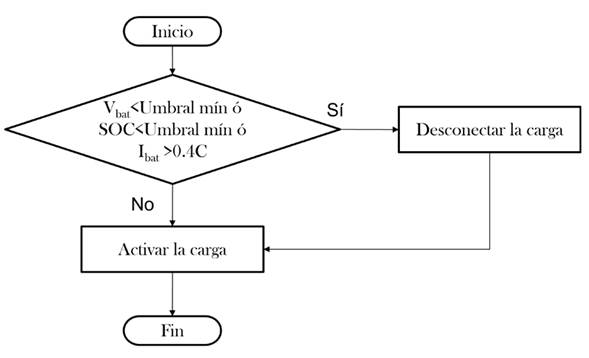
Figura 10: Algoritmo para la descarga de la batería
Resultados y discusión
Seguimiento del punto de máxima potencia
Para evaluar el seguimiento del punto de máxima potencia, se tomaron datos de voltaje y corriente para determinar la potencia producida por el panel solar y la consumida por la batería durante un tiempo de 2 horas y 20 minutos. En la Figura 10 se observa que la potencia almacenada por la batería sigue el comportamiento de la potencia producida durante el tiempo de prueba y alcanza valores cercanos a esta.
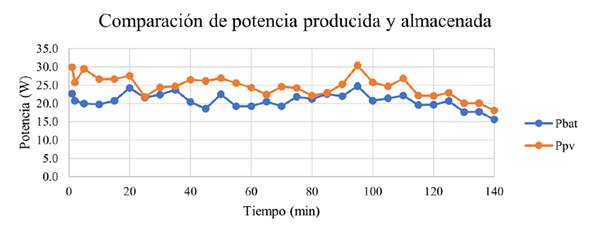
Figura 11: Comparación de potencia producida y almacenada
Con respecto al análisis de eficiencia del controlador, se obtuvo un promedio de 84,7 % (línea horizontal, Fig. 12). Asimismo, se observa que la eficiencia durante el inicio del controlador varía de forma abrupta entre el 70 y el 96 %, para luego estabilizarse alrededor del valor promedio. Lo anterior implica que, pese a las variaciones de radiación, el controlador de carga MPPT desarrollado tiene una eficiencia superior a la de un controlador PWM, cuyo valor promedio es del 70 %.
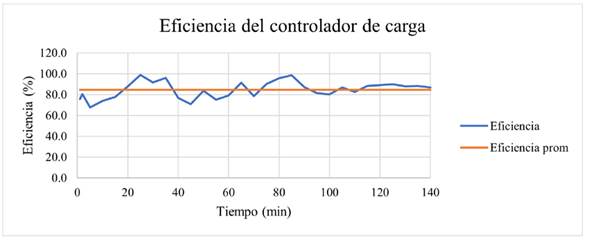
Figura 12: Eficiencia del controlador de carga
Carga y descarga de la batería
La Figura 12 muestra los resultados del proceso de carga de dos fases de la batería, la línea sólida que acompaña la gráfica corresponde al comportamiento ideal que debería tener el controlador durante las dos fases. Durante la fase de Bulk (llenado), el voltaje de la batería incrementa de forma exponencial desde 12,6 hasta 14,7 V. Al alcanzar este valor, inicia la fase de absorción, durante la cual el controlador empieza a variar el ciclo de trabajo para lograr que el voltaje de la batería converja alrededor del voltaje de absorción. En el minuto 250 se muestra una caída de tensión, debido a que el controlador reduce el ciclo de trabajo hasta 0 con el propósito de mantener el voltaje en 14,7 V. En la Fig. 14 se observa la corriente de carga de la batería, la cual inicialmente fluctúa entre 1,4 y 1,8 A. Luego empieza a decaer después del minuto 100 y mantiene esta tendencia hasta el minuto 200, tomando un mínimo de 1 A. En el intervalo del minuto 200 a 300, la corriente empieza a decaer por debajo de 1 A, tomando algunos picos por encima, lo que se explica debido a que durante este tiempo se encuentra en la fase de absorción el controlador, interrumpiendo la corriente con ciclos de trabajo variantes para tratar de mantener la tensión de la batería mientras que la corriente disminuye. Como resumen de esto, se observa que el controlador no solo toma en cuenta que la corriente de carga sea menor al 2 % de la capacidad de la batería, sino que, al establecer un porcentaje de carga del 100 %, la batería entra en la fase de tensión no regulada, por lo que el controlador realiza una comparación de dos posibles indicativos de la carga completa de la batería, optando por el método de estimación del SOC propuesto. Esto se observa al comparar que el estado de carga se acerca al 95 %, mientras que la corriente que fluye hacia la batería aún no es menor al 2 % de la capacidad de la batería y, aun así, el controlador reconoce que la batería ha sido recargada de forma adecuada.
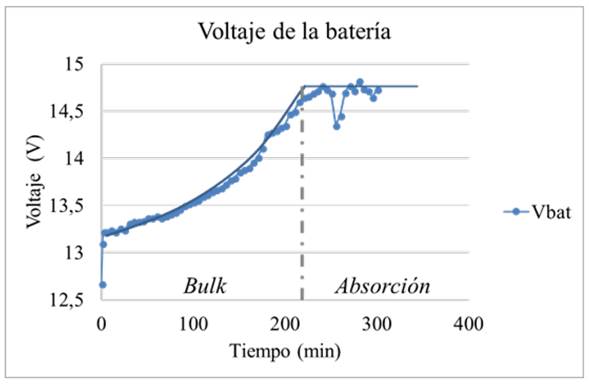
Figura 13: Voltaje de carga de la batería
Para evaluar el comportamiento del controlador de carga de la batería se realizó una prueba de descarga constante de la batería utilizando una carga de aproximadamente 6 W a 12 V. La prueba realizada tuvo una duración de 4 horas.
Como se observa en la Figura 14, el voltaje de la batería decae paulatina y aproximadamente de forma lineal desde 12,84 hasta 12,44 V.
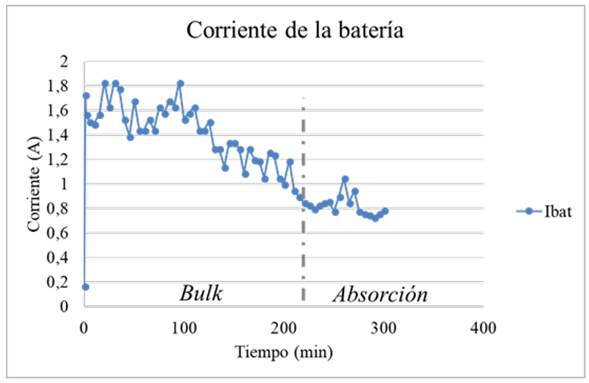
Figura 14: Corriente de carga de la batería
Aplicando una regresión lineal simple, se obtiene que la razón de cambio de descarga es de -0,0011 V/min, con un coeficiente de correlación cuadrático de 0,913. Tomando como referencia que el umbral mínimo de voltaje en batería es de 12 V (necesarios para operar la carga), se obtiene un tiempo de funcionamiento de 652 minutos, lo que equivale a 10 horas y 52 minutos de operación constante por parte del controlador en ausencia de radiación solar para cargar la batería.
La Figura 15 muestra la corriente de descarga de la batería, la cual varía con respecto al tiempo entre 0,56 y 0,58 A. Aunque la variación es mínima, se observa que, al conectar directamente la carga con la batería, esta última no entrega potencia de manera constante y se ve influenciada por el estado de carga. Lo anterior se refleja al comparar las disminuciones del voltaje y la corriente en la batería para cada instante de tiempo.
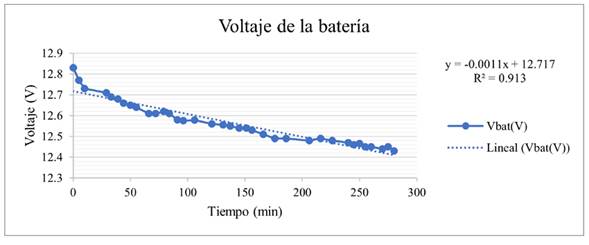
Figura 15: Voltaje de descarga de la batería
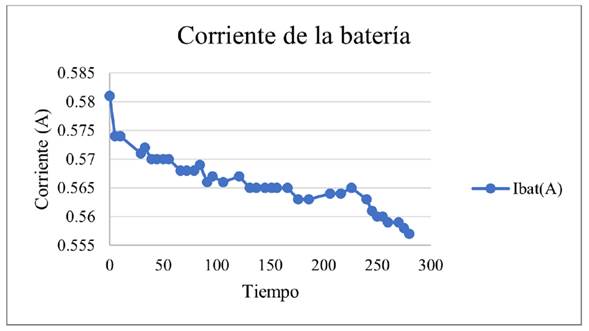
Figura 16: Corriente de descarga de la batería
Conclusiones y trabajo futuro
El controlador de carga desarrollado en este trabajo presentó un rendimiento acorde a las condiciones de operación, con eficiencia promedio del 84,7 % y picos de hasta 96,3 %, y está diseñado para transportar hasta 90 W de potencia de entrada y almacenar energía en baterías de ácido plomo de tensión nominal de 12 V. A nivel de firmware, el controlador de carga incluye un algoritmo de seguimiento del punto de máxima potencia basado en el método perturbación y observación, un algoritmo de carga de dos fases para baterías de ácido plomo y un algoritmo de protección para descargas y sobrecargas
El controlador de carga cumple con el algoritmo de carga de dos fases propuesto, aunque es claro que la corriente de carga varía en función de la radiación y, por lo tanto, no se puede garantizar una corriente constante durante la fase Bulk. Durante la fase de absorción, la tensión de la batería tiende a mantenerse constante, con picos cercanos al 5 % de la tensión de absorción (14,7 V), y la corriente de carga decae exponencialmente. Sin embargo, cuando el porcentaje de carga alcanza el 100 % no siempre corresponde con que la corriente sea menor o igual al 2 % de la capacidad nominal.
Como trabajo futuro de esta investigación, se podrían comparar los resultados de este controlador de carga con otros de similares características, pero con diferentes técnicas de estimación del punto de máxima potencia, tales como el algoritmo de conductancia incremental o algoritmos inteligentes basados en lógica difusa y redes neuronales. De esta manera, al comparar las diferentes técnicas de estimación del MPPT, se podría determinar cuál de estas presenta un mejor rendimiento y adaptación.
Asimismo, este trabajo presenta los resultados experimentales de implementación del algoritmo y del dispositivo mismo. Sería importante aumentar el tiempo de experimentación por lo menos uno o dos años, con el propósito de conocer el comportamiento de este dispositivo a lo largo del tiempo.
Referencias
License
Copyright (c) 2023 Luis Fernando Bustos-Márquez, Sergio Basilio Sepúlveda-Mora, Dinael Guevara-Ibarra, Byron Medina-Delgado

This work is licensed under a Creative Commons Attribution-NonCommercial-ShareAlike 4.0 International License.
![]()
From the edition of the V23N3 of year 2018 forward, the Creative Commons License "Attribution-Non-Commercial - No Derivative Works " is changed to the following:
Attribution - Non-Commercial - Share the same: this license allows others to distribute, remix, retouch, and create from your work in a non-commercial way, as long as they give you credit and license their new creations under the same conditions.

2.jpg)





