DOI:
https://doi.org/10.14483/23448393.1872Publicado:
2004-11-30Número:
Vol. 10 Núm. 1 (2005): Enero - JunioSección:
Ciencia, investigación, academia y desarrolloMicroestructura CMOS para la Manipulación de Micropartículas
CMOS Microestructure to Microparticle Manipulation
Palabras clave:
Dielectroforésis, manipulación de micropartículas, microsistemas, CMOS (es).Descargas
Referencias
Marco S. et al. Analysis of electrostatic-damped piezoresistive silicon accelerometers. Sensors and Actuators A, 37-38, 1993, p. 317 322.
Marco S. et al. High-performance piezoresistive pressure sensors for biomedical applications using very thin structures membranes. Measurement Science and Technology, 7, 1996, p. 1195 1203.
Carmona M. et al. Dynamic simulation of micropumps. Journal of Micromechanics and Microengineering, 6, 1996, p. 128 - 130.
Walker J.. The future of MEMS in telecommunications networks. Journal of Micromechanics and Microengineering, 10, 2000, p. R1 R7.
Lee S-W y Tai Y-C. A micro cell lysis device. Sensors and Actuators A, 73, 1999, p. 74 79.
Nishioka M. et al. Evaluations of cell characteristics by stepwise orientational rotation using toelectrostatic micromanipulation. IEEE Transactions on Industry Applications, 33, 1997, p. 1381 - 1388.
Choi J-W. et al. A new magnetic bead-based filterless bioseparator for integrated bio-molecule detection systems. The 13th European Conference on Solid-State Transducers EUROSENSORS XIII. Septiembre 12-15, 1999. The Hague. The Netherlands. p. 363 - 364.
Fuhr G. et al. Analysis of the torque-frequency characteristics of dielectric induction motors. En : Sensors and Actuators A, 33. 1992, p. 237 - 247.
Porras Y. M. et al. Manipulación de protozoos por ultrasonido. Revista Colombiana de Biotecnología. 6, 1, 2004, p. 79 84.
Pohl H. A.. Some effects of nonuniform fields on dielectrics. Journal of Applied Physics, 29, 1958, p. 1182 - 1188.
Pohl H. A. y Pethig R.. Dielectric measurements using non- uniform electric field (dielectrophoretic) effects. Journal of Physics E: Sci. Instrum. 10, 1977, p. 190 - 193. Corrigendum 883.
Burt J. et al.. An optical dielectrophoresis espectrometer for low-frequency measurements on colloidal suspensions. Journal of Physics E: Sci. Instrum. 22, 1989, p. 952 - 957.
Quinn C. et al. Dose-dependent dielectrophoretic response of Cryptosporodium oocysts treated whit ozone. Letters in Applied Microbiology, 22, 1996, p. 224 - 228.
Becker F. et al. The removal of human leukaemia cells from blood using interdigitated microelectrodes. Journal of Physics D: Applied Physics, 27, 1994, p. 2659 - 2662.
Hughes M. et al. Computer-aided analyses of electric fields used in electrorotation studies. Journal of Physics D: Applied Physics, 27, 1994, p. 1564 - 1570.
Georgieva R. et al. Low frequency electrorotation of fixed red blood cells. Biophysical Journal, 74, 1998, p. 2114 - 2120.
Hoettges K. et al. Optimizing particle collection for enhanced surface-based biosensors. IEEE in Medicine and Biology Magazine, 22, 2003, p. 68 - 74.
Müller T. et al. High-frequency electric-field trap for micron and submicron particles. Il Nuovo Cimento 17 D. 1995, p. 425 - 432.
Talary M. et al. Electromanipulation and separation of cells using travelling electric fields. Journal of Physics D: Applied Physics, 29, 1996, p. 2198 - 2203.
Zimmermann U. y Neil G. A.. Electromanipulation of cells. Ed. CRC Press Inc., 1996, p. 304.
Fernández F. y Samitier J.. Electro-thermal modeling of a bioparticle microhandler. 2ª Conferencia de Dispositivos Electrónicos, CDE-99. Junio 10 y 11 de 1999, Madrid, España, p. 201 203.
Fernández F. et al. Diseño y simulación de microelectrodos en tecnología CMOS para aplicaciones dielectroforéticas. XII Conference of the Brazilian Microelectronics Society. Julio 28 a agosto 1, 1997. Federal School of Engineering at Itajuba. Caxambú, Minas Gerais, Brasil, 1997.
Cómo citar
APA
ACM
ACS
ABNT
Chicago
Harvard
IEEE
MLA
Turabian
Vancouver
Descargar cita
Ingeniería, 2005-00-00 vol:10 nro:1 pág:23-31
Microestructura CMOS para la manipulación de micropartículas
CMOS MICROSTRUCTURE TO MICROPARTICLE MANIPULATION
Flavio Humberto Fernández M.
Miembro Grupo Energía y Aplicación de Nuevas Tecnologías(GEANT)
Julio Enrique Duarte
Miembro Grupo Energía y Aplicación de Nuevas Tecnologías (GEANT)
Josep Samitier Martí
Profesor catedrático, Universidad de Barcelona.
Resumen
La manipulación de micropartículas naturales y artificiales, es una operación frecuente en áreas como la biotecnología y la medicina. Por ello, existe un gran interés por desarrollar dispositivos versátiles y eficientes que reemplacen a los métodos de laboratorio tradicionales. Es así como se han aprovechado las ventajas que ofrecen los campos eléctricos como mecanismo de actuación, ya que solo requieren el empleo de electrodos para su implementación. De hecho, existe una gran cantidad de aplicaciones que utilizan tecnología de microsistemas para fabricar estas herramientas de manipulación. Sin embargo, sería deseable el disponer de dispositivos desarrollados en tecnología microelectrónica estándar, con el fin de facilitar su procesado tecnológico, a la vez que se reducen sus costos de fabricación. En vista de lo anterior, en este trabajo se plantea el diseño y fabricación de una microestructura en tecnología CMOS con el fin de verificar la viabilidad de la manipulación de micropartículas a través de campos eléctricos inhomogéneos. Además, se presentan algunos resultados experimentales obtenidos con microesferas de poliestireno de 2 µm de diámetro.
Palabras clave:
Dielectroforésis, manipulación de micropartículas, microsistemas, CMOS
Abstract
Artificial and natural microparticle manipulation is a common operation in biotechnology and medicine. As a consequence, there is an enormous interest in developing versatile and efficient devices to replace the traditional laboratory methods. Thus, electric fields have been used as an actuation mechanism because they only require a few electrodes to make particle manipulators. In fact, there are some applications which employ microsystem technologies to fabricate these manipulation tools. However, it could be interesting to have at disposal devices developed in standard microelectronics technology, in order to simplify their processing as well as to reduce their manufacturing costs. As a result, in this work it is outlined the design and fabrication of a microstructure in CMOS technology, in order to demonstrate the viability of microparticle manipulation through inhomogeneous electric fields. Furthermore, some experimental results with particles of 2 µm in diameter are shown.
Key Words:
Dielectrophoresis, microparticle manipulation, microsystems, CMOS
1. INTRODUCCIÓN
Desde su aparición, los circuitos integrados han hecho uso de la posibilidad de controlar las propiedades eléctricas de semiconductores como el silicio, con el fin de generar dispositivos que suplan los requerimientos de áreas como las telecomunicaciones, la automatización de procesos y el tratamiento de información, por mencionar algunas. Sin embargo, a partir de los años 80, los científicos se dieron cuenta que el silicio también poseía excelentes propiedades mecánicas para la configuración de estructuras tridimensiionales, e iniciaron el desarrollo de un conjunto de técnicas conocido como tecnología de microsistemas. Entre ellas caben mencionar: micromecanizado del silicio, pegado o bonding de obleas de silicio y vidrio, y la utilización de materiales no convencionales dentro de los procesos microelectrónicos tradicionales.
Estas nuevas técnicas, unidas a la microelectrónica estándar, han permitido el desarrollo de microsistemas; es decir, circuitos integrados que concentran en una sola pastilla al dispositivo mecánico (sensor y/o actuador) junto con el circuito electrónico para el procesamiento de la señal. Como ejemplo de ellos se pueden mencionar los acelerómetros, sensores de presión, microbombas, microespejos y biosensores, entre otros [1-5].
Por otro lado, existe un gran interés en desarrollar herramientas que permitan la manipulación de micropartículas naturales y artificiales, las cuales tienen una gran demanda en áreas como la biotecnología y la medicina. Desde el punto de vista físico, como mecanismo de actuación se plantea el uso de fuerzas ópticas, magnéticas, eléctricas y ultrasónicas, entre otras [6-9]. Aunque cada una de ellas tiene sus ventajas, la opción de los campos eléctricos es muy interesante ya que para su implementación solo se requieren algunos electrodos alimentados convenientemente. De hecho, la manipulación de partículas individuales requiere de herramientas con tamaño comparable al de las partículas mismas, típicamente entre 1 y 100 µm. Dispositivos de estas dimensiones, con la precisión adecuada, solo se pueden conseguir empleando tecnología de microsistemas para su fabricación.
Pero, como se mencionó anteriormente, la tecnología de microsistemas utiliza procedimientos propios de la microelectrónica como lo son la fotolitografía y el depósito de metales sobre superficies de silicio, junto con otra serie de técnicas que no son estándares en el proceso tecnológico. Es precisamente éste último conjunto de técnicas las que han retardado la introducción y aplicación de microsistemas a nivel comercial, ya que muchas de ellas son de carácter experimental y no se adaptan a los procesos estándar para la fabricación de circuitos integrados.
Como una alternativa a la problemática anterior, aquí se plantea el diseño y construcción de un circuito integrado para la manipulación de micropartículas, totalmente compatible con la tecnología CMOS estándar. El hecho de tener un dispositivo en ésta tecnología, quizás la más popular en la fabricación de integrados, abre una amplia gama de posibilidades y perspectivas para el desarrollo de microsistemas manipuladores de micropartículas integrados con toda la circuitería de control sobre una misma pastilla. Igualmente, en éste trabajo se hace una breve descripción de los conceptos básicos referentes al fenómeno físico en el cual se basa la manipulación de partículas mediante campos eléctricos no uniformes. Finalmente, se presentan algunos resultados experimentales obtenidos al probar el circuito integrado con microesferas de poliestireno de 2 µm de diámetro.
2. CONCEPTOS BÁSICOS
En general, los fenómenos electrocinéticos de partículas asociados con campos eléctricos no homogéneos son la dielectroforésis convencional (DEP), la electrorotación (ROT) y la dielectroforésis de onda viajera (TWD), cuyo principio físico es el mismo: interacción de un campo eléctrico no uniforme con partículas dieléctricas no cargadas. Todos ellos se sirven de electrodos metálicos para aplicar el campo a la suspensión de partículas que se desean manipular.
Desde un comienzo, la DEP ha sido la base de una gran cantidad de aplicaciones industriales como por ejemplo: remoción de partículas sólidas en una solución polimérica, bombeo de líquidos no conductores y medición de propiedades dieléctricas de materiales [10,11]. Más recientemente, la DEP en todas sus variantes ha sido utilizada en aplicaciones de biotecnología y biomedicina entre las cuales cabe destacar: caracterización de partículas artificiales y biopartículas (células vegetales y animales, bacterias, virus, etc.) de diferentes tipos [12,13], separación de partículas sobre la base de la polarizabilidad diferencial [14], determinación de propiedades físicas y biológicas de las partículas [15,16], y manipulación de partículas en términos de movimiento lineal, posicionamiento y levitación [17-19].
2.1. Dielectroforésis
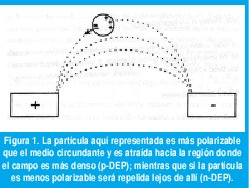
Cualquier partícula polarizable bajo la acción de un campo eléctrico presentará la aparición de cargas eléctricas positivas y negativas en cantidades iguales. Esta distribución de cargas se puede modelar como un dipolo, el cual se alineará cuando sea sometido a un campo eléctrico. Ante la presencia de un campo no uniforme, un extremo del dipolo estará en una región más débil que el otro, lo cual originará una fuerza neta y el dipolo será obligado a moverse hacia el lugar de mayor intensidad del campo, dependiendo del signo de la función de polarizabilidad (o factor de Clausius-Mosotti). A este movimiento de materia inducido por la acción de polarización de un campo eléctrico no uniforme se le conoce como dielectroforésis (DEP) [10]. La Figura 1 ilustra los conceptos anteriores para un sistema de electrodos coplanares cuya distribución del campo eléctrico es no uniforme.
La fuerza translacional dielectroforética neta,FDEP, actuante sobre una partícula esférica de radio r, eléctricamente neutra, dentro de un campo eléctrico no uniforme E, está dada por [11]:

donde ∇ es el operador vectorial gradiente y Re[FCM] es la parte real del factor de Clausius-Mosotti. Además, dicho factor viene dado por [18]:

donde ε0= 8.854x10-12(Farad m-1) es la permitividad del vacío, los subíndices p y m indican partícula y medio respectivamente, y ε* indica que se está trabajando con los parámetros de permitividad compleja que son dependientes de la frecuencia y están dados por:

donde ε es la permitividad relativa efectiva,σ es la conductividad efectiva, ω es la frecuencia angular del campo eléctrico aplicado y j=√-1 .
Como se puede observar en la ecuación 1, la fuerza dielectroforética es proporcional al cubo del radio de la partícula (o lo que es lo mismo, a su volumen), a la parte real del FCM y al gradiente del cuadrado de la intensidad del campo eléctrico. Esto último implica que la dirección de la fuerza es independiente del signo del campo y, a su vez, el efecto dielectroforético se presentará tanto en campos continuos (DC) como en campos alternos (AC). En otras palabras, la dirección de la FDEP depende, en últimas, de la frecuencia y de la relación de permitividades y conductividades de partículas y medio.
Las partículas que son más polarizables que el medio, es decir aquellas cuya permitividad efectiva y/o conductividad son mayores que las del líquido que las rodea, corresponderán a un valor positivo de la parte real del FCM y la partícula experimentará una fuerza que la dirige hacia el sitio donde el campo eléctrico presenta un máximo en su intensidad; a éste fenómeno se le conoce como dielectroforésis positiva (p-DEP). En forma inversa, una partícula con polarizabilidad lo suficientemente baja como para que la parte real del FCM sea negativa, es decir que su permitividad efectiva y/o conductividad sean menores que las del medio, experimentará una fuerza que la dirigirá hacia un punto donde la intensidad del campo eléctrico presenta un mínimo; a éste fenómeno se le conoce como dielectroforésis negativa (n-DEP).
2.2. Dielectroforésis de onda viajera
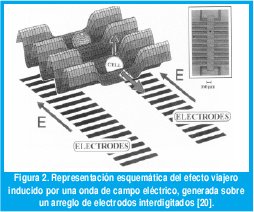
Un arreglo de electrodos lineales con la configuración adecuada (ver figura 2) y alimentado con la secuencia apropiada de voltajes, se puede utilizar para generar ondas de campo eléctrico viajero que al interactuar con las partículas dentro de una suspensión causarán su desplazamiento ya sea en el mismo sentido o en sentido contrario al del campo viajero. Al movimiento de materia así causado se le conoce como dielectroforésis de onda viajera (TWD) y es muy útil en aplicaciones de movimiento lineal, separación y transporte de partículas.
La ventaja de los electrodos interdigitados es que pueden ser tan largos como sea necesario, pero las conexiones se repiten cada cuatro electrodos de manera que al final solo se requieren cuatro señales de alimentación. Diversos autores han encontrado que la TWD es un fenómeno de características electrorotacionales, donde la fuerza TWD que afecta a la partícula es proporcional a la componente imaginaria (o fuera de fase) del momento de dipolo inducido y en últimas a la parte imaginaria del factor de Clausius-Mosotti.
En el caso específico de los electrodos interdigitados de la Figura 2 se ha encontrado que la fuerza TWD (FTWD) se puede describir como [20]:

siendo λ la distancia periódica entre electrodos de la misma fase e Im[FCM] la parte imaginaria del factor de Clausius-Mosotti. Además de ser proporcional a Im[FCM], la FTWD es proporcional al cuadrado de la intensidad del campo eléctrico E.
Se debe tener en cuenta que para que exista movimiento translacional de partículas es necesario que el signo de la parte real del FCM sea negativo. Es decir que la existencia de n-DEP es una condición necesaria para que las partículas sean levitadas sobre el plano de los electrodos y, de este modo, la componente viajera del campo pueda inducir el movimiento translacional en la materia. En caso de que ocurra p-DEP, las partículas serán atraídas y retenidas sobre los electrodos y no presentarán ningún tipo de movimiento posterior.
Lo que sucede en realidad es la superposición de la interacción de las dos componentes del momento dipolar inducido; por un lado la componente real causando la n-DEP y por otro la componente imaginaria causando el desplazamiento de la partícula.
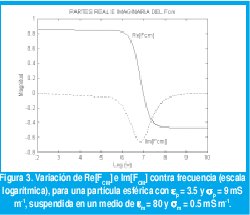
A manera de ejemplo, la Figura 3 muestra el comportamiento de las partes real e imaginaria del factor de Clausius-Mosotti con respecto a la frecuencia, para una partícula de látex en un experimento típico. Este tipo de gráficas es único para cada situación experimental, ya que varían con respecto a las permitividades efectivas y conductividades del medio y de la partícula. De acuerdo con lo anterior, para los valores de la figura 3 se observa que existirá n-DEP, y por ende TWD, para frecuencias superiores a 10 MHz. Esta frecuencia viene determinada por el punto de cruce por cero de Re[FCM], y coincide con el punto en que Im[FCM] es máximo, indicando que allí ocurre un proceso de relajación en la interface entre el medio y la partícula.
Según la ecuación 4, cuando Im[FCM] es positivo las partículas se mueven en sentido contrario al del campo viajero, y viceversa. Además, la magnitud de Im[FCM] debe tener un valor suficientemente elevado para inducir dicho movimiento.
3. METODOLOGÍA Y MATERIALES
3.1. Circuito integrado
Existen electrodos con diversas formas según la aplicación que se desee realizar. Entre los más comunes para la TWD están las espirales cuadradas y circulares. Para la DEP se utilizan electrodos interdigitados, solos o en grupos, que pueden terminar en puntas redondeadas o rectangulares. Para la ROT se utilizan los electrodos polinomiales y estructuras cuadrupolares.
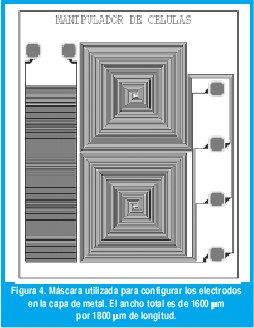
Valga decir que la tecnología disponible en éste proyecto, la CNM25, imponía una serie de restricciones en las reglas de diseño como el hecho de que la separación mínima entre las pistas era de 2.5 m y el ángulo entre 2 líneas adyacentes no podía ser diferente de 90º o 45º. Teniendo en cuenta lo anterior, y a pesar de existir otras alternativas geométricas, en éste trabajo se escogió la estructura interdigitada que solo requiere dos señales de alimentación para el estudio de la DEP común. Adicionalmente, se seleccionaron dos estructuras de cuatro electrodos planares en espiral, colocadas una al lado de la otra, que permiten el estudio de la TWD. Ésta ultima configuración posibilita una mayor área de cobertura y solo requiere cuatro señales de entrada.
El proceso de fabricación de la microestructura se llevó a cabo en el Centro Nacional de Microelectrónica de Barcelona (CNM), España, empleando para ello la tecnología CMOS allí disponible (CNM25). De ésta manera fue posible obtener electrodos de aluminio sobre un substrato de silicio de aproximadamente 400 mm. La figura 4 muestra la máscara empleada en el proceso de fotolitografía para conformar los electrodos (interdigitado y espirales) en la capa metálica de la tecnología CMOS.
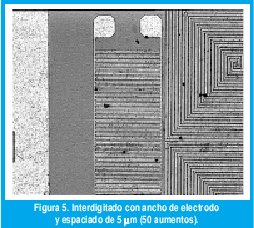
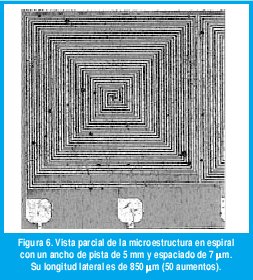
Como resultado del proceso antes mencionado, se obtuvieron los arreglos mostrados en las Figuras 5 y 6.
El proceso de fabricación de un microsistema implica, además de depositar los electrodos sobre el substrato, otros pasos tecnológicos como el corte de la oblea y el encapsulado del dispositivo para su utilización final. En el diseño y fabricación de microsistemas, la etapa de encapsulado juega un papel fundamental ya que de ella dependen su conectabilidad, robustez y manipulabilidad. En otras palabras, el encapsulado provee la conexión con las señales eléctricas de alimentación así como la interfaz con el fluido a analizar.
Por otro lado, el encapsulado es un proceso costoso y tedioso cuyo resultado depende en gran medida de la pericia del operario, ya que en los protoripos esto se realiza de forma manual. Lo anterior, unido a que el objetivo de ésta microestructura era el de verificar la ocurrencia del fenómeno dielectroforético sobre los electrodos, hizo que las etapas posteriores al crecimiento de los electrodos no se realizaran.
3.2. Montaje experimental
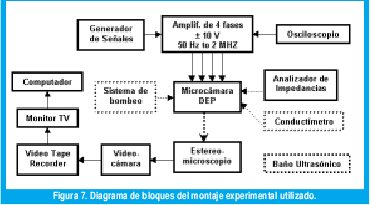
Como se ilustra en la Figura 7, para llevar a cabo las pruebas de un circuito manipulador de micropartículas, el equipo requerido consta de tres partes principales: El sistema electrónico (computador, generador de señales y amplificador), permite generar las formas de onda adecuadas para ser aplicadas a los electrodos y de esta manera inducir el efecto dielectroforético deseado. También se incluye un osciloscopio para verificar la secuencia de fases y un analizador de impedancias. Se utilizó un generador de señales convencional y fue necesario diseñar y adaptar una plaqueta que permite la generación de las cuatro fases y la variación de su amplitud en forma independiente. En segundo lugar está el micromanipulador propiamente dicho. Finalmente, el sistema óptico (microscopio, cámara y videograbadora), permite observar y grabar el comportamiento electrocinético de las partículas para su posterior análisis.
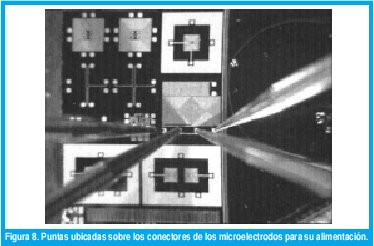
Adicionalmente se usó un sistema de puntas marca Karl Suss con cuatro posicionadores; los requeridos para aplicar la señal eléctrica a los electrodos (ver Figura 8). Es necesario disponer de un banco de trabajo bastante rígido para evitar la interferencia de las vibraciones sobre la parte mecánica del montaje. Una vez conectadas las agujas en el circuito integrado, hay que evitar cualquier movimiento brusco; pues de lo contrario las agujas pueden rayar y levantar el aluminio de los electrodos, dejando la estructura inservible. La fase experimental de éste trabajo se llevó a cabo en las instalaciones del Departamento de Electrónica de la Universidad de Barcelona.
3.3. Micropartículas y medio
En el presente trabajo se emplearon microesferas de poliestireno (Latex FluoSpheres carboxylate modified) de la empresa Molecular Probes Inc., Eugene, Oregon, USA.; con diámetro de 2 µm. Es necesario destacar que las microesferas de látex se han convertido en estándares en el test de microsistemas para manipulación de biopartículas, gracias a que sus propiedades físicas son muy similares a las de las células.
De acuerdo con las recomendaciones del fabricante, las partículas se diluyeron en una relación de 1 a 200 de la concentración original. La solución se preparó con agua destilada, con una conductividad de 1.26x10-4 S m-1, para evitar la presencia de iones que puedan deteriorar la superficie de los electrodos. La muestra se aplicó sobre el integrado con una micropipeta de volumen variable entre 10 y 100 µL.
Antes de utilizar la solución es recomendable aplicarle un baño ultrasónico de entre 3 y 5 minutos. Dicho requerimiento es útil para deshacer los aglomerados que se hayan formado durante el almacenamiento. Una vez colocada la muestra sobre el integrado y antes de aplicar la señal eléctrica, es necesario dejar transcurrir un tiempo prudencial (mínimo 30 segundos) para que la solución se estabilice y las partículas pierdan la energía propia de la caída.
Vale la pena destacar que en la parte experimental de este proyecto se combinan disciplinas como la electrónica, la óptica y la química. Por lo tanto se exige una preparación minuciosa de los diversos detalles prácticos, pues existe una gran cantidad de variables que alteran el resultado final y que se han ido identificando a medida que se efectúan las observaciones.
4. RESULTADOS Y DISCUSIÓN
4.1. Observaciones
La estructura de electrodos interdigitados permite el estudio del efecto DEP simple ya que solo tiene dos fases de alimentación. Sin embargo, en la práctica no se pudo verificar su funcionalidad por dos razones: la limitada resolución del sistema óptico disponible y el hecho de que todas las observaciones se efectúan de manera perpendicular a la superficie de los electrodos (vista superior), lo cual hace imposible ver la levitación de las partículas y mucho menos cuantificar dicho efecto.
En el caso de la espiral cuadrada, al aplicar la señal de alimentación se observa que las partículas ubicadas en la parte central de los brazos de la espira presentan un desplazamiento lineal, alejándose o acercándose al centro de la estructura según el brazo en el que se encuentren ubicadas. Al invertir la secuencia de alimentación de los electrodos también se invierte el sentido de desplazamiento de las partículas. La velocidad promedio de este movimiento fue de aproxi- madamente 150 µm s-1 (ver Figura 9). Al reducir la señal de alimentación a ±4.5 V, la velocidad promedio de movimiento de los aglomerados disminuyó a 120 µm s-1.

Las partículas que se hallan más próximas a la diagonal siguen una trayectoria parabólica: primero se acercan al centro y, una vez atravesada la diagonal, se alejan de él. Esto se puede explicar debido a que las esquinas de las espiras presentan el máximo gradiente del campo eléctrico dentro de la estructura, y cualquier partícula desplazándose en sus proximidades sufrirá un cambio brusco en su dirección de movimiento [21]. Después de cada medida la microestructura se limpió con un baño ultrasónico de agua destilada durante 5 minutos. Este procedimiento permite reciclar cada dispositivo hasta 3 veces sin percibir alteraciones en su funcionamiento.
Otra de las observaciones fue la formación de burbujas en la interface electrodo-solución para frecuencias inferiores a 10 kHz. La formación de burbujas aumenta considerablemente a medida que se eleva el voltaje. Al incrementar la frecuencia este fenómeno desaparece. Una vez ocurrido el burbujeo, los electrodos cambian de color obscureciéndose y, si el tiempo de prueba ha sido muy largo, puede incluso llegar a su destrucción.
4.2. Discusión de resultados
La estructura bajo prueba carece de la capa de pasivación de SiO2 sobre el metal, ya que se trata de una versión provisional del integrado en la que el proceso CMOS se desarrolló hasta la capa de aluminio. Esto implica que la muestra se encuentre en contacto directo con los electrodos, causando problemas como el burbujeo y el deterioro del aluminio.
El burbujeo se debe a la liberación de oxígeno disuelto en el agua como consecuencia de una corriente de carácter iónico que fluye entre los electrodos, cuya magnitud aumenta a medida que se eleva el voltaje y se reduce la frecuencia, y de la correspondiente electrólisis de la muestra.
La evidencia experimental de lo anterior está en el mayor número de burbujas a medida que se eleva el voltaje, en el cambio de color de los electrodos después de la prueba y en que, si el tiempo de medida es muy grande, el aluminio se desprende del sustrato. Es posible que éste problema desaparezca en una versión del integrado en la cual los electrodos queden aislados de la muestra por una capa de SiO2 o de cualquier otro dieléctrico. Sin embargo, esta capa no podrá hacerse execivamente gruesa ya que ello reducurá la intensidad del campo eléctrico que afecta a las partículas [22].
En cuanto al movimiento de las partículas se puede explicar en virtud de dos situaciones. En primer lugar si la frecuencia de la señal de alimentación es adecuada para la ocurrencia de n-DEP (es decir, las partículas son repelidas hacia las regiones de mínima intensidad del campo eléctrico), las partículas levitarán a una altura estable sobre los electrodos. Una vez allí, y debido a que la secuencia de los voltajes de alimentación permite la generación de un campo eléctrico viajero sobre la estructura, la interacción de la componente viajera de la fuerza con el momento dipolar equivalente de la partícula harán que ésta última se desplace linealmente. Lo anterior sucederá en regiones lejanas a las diagonales de la espiral.
Cuando las partículas se hallan próximas a las esquinas de los electrodos, éstas serán desviadas de su trayectoria original debido a que la divergencia del campo eléctrico en esos puntos es máxima. El hecho de que las partículas se desvíen de su trayectoria lineal podría aprovecharse en aplicaciones del tipo filtros o separadores de partículas. Si lo que se desea es movimiento lineal, habrá que establecer canales de conducción que minimicen el efecto de los bordes de las espiras, o emplear geometrías con cambios menos bruscos.
5. CONCLUSIONES
Vale la pena destacar que el procedimiento típico de fabricación de las microestructuras implica crecer los electrodos (normalmente de oro, platino u otro metal noble) sobre un substrato de plástico, vidrio o silicio, usando fotolitografía para delinear las estructuras. Posteriormente se procede a configurar la cavidad donde se depositará la suspensión de partículas, lo cual se puede hacer de diversas formas: pegando anillos plásticos, por ataque o micromecanizado del silicio, o empleando algún tipo de resina fotosensible. Sin embargo, estos procesos son altamente contaminantes y difíciles de tratar en sala blanca.
Por ello, y a diferencia de otros diseños reportados en la literatura, uno de los principales aportes de éste trabajo consiste en que la microestructura se ha fabricado totalmente en tecnología CMOS y esto facilitará la integración de circuitería de control adicional que permitirá el desarrollo de microsistemas con aplicaciones en biotecnología y medicina, mejorando el rendimiento de los existentes en la actualidad.
Se ha verificado experimentalmente la viabilidad del fenómeno dielectroforético, con micropartículas de poliestireno, en estructuras CMOS. De esta manera, la tecnología CMOS se presenta como una alternativa para el desarrollo de dispositivos para la manipulación de micropartículas, basados en el fenómeno dielectroforético.
Los puntos críticos en la microestructura estudiada son los vértices de los electrodos puesto que allí se concentran los máximos gradientes de potencial, temperatura y calentamiento por efecto Joule. Debido a que estos cambios bruscos en la geometría de los electrodos no pueden eliminarse porque de ellos depende en gran medida el fenómeno DEP, habrá que limitar los valores de voltaje de operación y de conductividad del medio.
La electrólisis de la solución es un problema cuando se trabaja a bajas frecuencias y con un voltaje elevado. Para evitarlo habrá que utilizar frecuencias superiores a 10 kHZ, con bajos valores de voltaje de alimentación y conductividad de la muestra. Una posible solución es la utilización de una capa de dieléctrico (por ejemplo SiO2), que minimice la superficie de contacto entre el líquido y los electrodos.
En éste trabajo se emplearon únicamente cuatro fases para controlar el movimiento de las micropartículas. Si en futuros diseños se desea tener un control más fino y de mayor precisión, será indispensable utilizar electrodos con un mayor número de conductores.
Una de las tareas a realizar en el futuro será el encapsulado del circuito para mejorar su manipulabilidad, aumentar su robustez y facilitar su conectabilidad. También será deseable el que en una próxima versión del dispositivo se disponga de una piscina o cavidad que facilite la colocación de la muestra bajo estudio.
REFERENCIAS BIBLIOGRÁFICAS
[1] Marco S. et al. Analysis of electrostatic-damped piezoresistive silicon accelerometers. Sensors and Actuators A, 37-38, 1993, p. 317-322.
[2] Marco S. et al. High-performance piezoresistive pressure sensors for biomedical applications using very thin structures membranes. Measurement Science and Technology, 7, 1996, p. 1195-1203.
[3] Carmona M. et al. Dynamic simulation of micropumps. Journal of Micromechanics and Microengineering, 6, 1996, p. 128 - 130.
[4] Walker J.. The future of MEMS in telecommunications networks. Journal of Micromechanics and Microengineering, 10, 2000, p. R1 - R7.
[5] Lee S-W y Tai Y-C. A micro cell lysis device. Sensors and Actuators A, 73, 1999, p. 74-79.
[6] Nishioka M. et al. Evaluations of cell characteristics by step-wise orientational rotation using optoelectrostatic micromanipulation. IEEE Transactions on Industry Applications, 33, 1997, p. 1381 - 1388.
[7] Choi J-W. et al. A new magnetic bead-based filterless bioseparator for integrated bio-molecule detection systems. The 13th European Conference on Solid-State Transducers EUROSENSORS XIII. Septiembre 12-15, 1999. The Hague. The Netherlands. p. 363 - 364.
[8] Fuhr G. et al. Analysis of the torque-frequency characteristics of dielectric induction motors. En : Sensors and Actuators A,33. 1992, p. 237-247.
[9] Porras Y. M. et al. Manipulación de protozoos por ultrasonido. Revista Colombiana de Biotecnología. 6, 1, 2004, p. 79-84.
[10] Pohl H. A.. Some effects of nonuniform fields on dielectrics. Journal of Applied Physics, 29, 1958, p. 1182 - 1188.
[11] Pohl H. A. y Pethig R.. Dielectric measurements using non- uniform electric field (dielectrophoretic) effects. Journal of Physics E: Sci. Instrum. 10, 1977, p. 190 - 193. Corrigendum 883.
[12] Burt J. et al.. An optical dielectrophoresis espectrometer for low-frequency measurements on colloidal suspensions. Journal of Physics E: Sci. Instrum. 22, 1989, p. 952-957.
[13] Quinn C. et al. Dose-dependent dielectrophoretic response of Cryptosporodium oocysts treated whit ozone. Letters in Applied Microbiology, 22, 1996, p. 224 - 228.
[14] Becker F. et al. The removal of human leukaemia cells from blood using interdigitated microelectrodes. Journal of Physics D: Applied Physics, 27, 1994, p. 2659 - 2662.
[15] Hughes M. et al. Computer-aided analyses of electric fields used in electrorotation studies. Journal of Physics D: Applied Physics, 27, 1994, p. 1564 - 1570.
[16] Georgieva R. et al. Low frequency electrorotation of fixed red blood cells. Biophysical Journal, 74, 1998, p. 2114 - 2120.
[17] Hoettges K. et al. Optimizing particle collection for enhanced surface-based biosensors. IEEE in Medicine and Biology Magazine, 22, 2003, p. 68-74.
[18] Müller T. et al. High-frequency electric-field trap for micron and submicron particles. Il Nuovo Cimento 17 D. 1995, p. 425 - 432.
[19] Talary M. et al. Electromanipulation and separation of cells using travelling electric fields. Journal of Physics D: Applied Physics, 29, 1996, p. 2198 - 2203.
[20] Zimmermann U. y Neil G. A.. Electromanipulation of cells. Ed. CRC Press Inc., 1996, p. 304.
[21] Fernández F. y Samitier J.. Electro-thermal modeling of a bioparticle microhandler. 2ª Conferencia de Dispositivos Electrónicos, CDE-99. Junio 10 y 11 de 1999, Madrid, España, p. 201-203.
[22] Fernández F. et al. Diseño y simulación de microelectrodos en tecnología CMOS para aplicaciones dielectroforéticas. XII Conference of the Brazilian Microelectronics Society. Julio 28 a agosto 1, 1997. Federal School of Engineering at Itajuba. Caxambú, Minas Gerais, Brasil, 1997.
Flavio Humberto Fernández Morales
Doctor en Ingeniería Electrónica. Profesor Asociado, Facultad Seccional Duitama Universidad Pedagógica y Tecnológica de Colombia, Sede Duitama. Grupo de Energía y Aplicación de Nuevas Tecnologías (GEANT) flaviofm@telecom.com.co
Julio Enrique Duarte
Doctor en Física. Profesor Titular, Facultad Seccional Duitama, Universidad Pedagógica y Tecnológica de Colombia, Sede Duitama. Grupo de Energía y Aplicación de Nuevas Tecnologías (GEANT) julioenriqueduarte@latinmail. com
Josep Samitier Martí
Doctor en Física. Profesor Catedrático, Departamento de Electrónica, Universitat de Barcelona, c./Martí i Franquès 1, 08028, Barcelona, España. samitier@el.ub.es
Creation date:
Licencia
![]()
A partir de la edición del V23N3 del año 2018 hacia adelante, se cambia la Licencia Creative Commons “Atribución—No Comercial – Sin Obra Derivada” a la siguiente:
Atribución - No Comercial – Compartir igual: esta licencia permite a otros distribuir, remezclar, retocar, y crear a partir de tu obra de modo no comercial, siempre y cuando te den crédito y licencien sus nuevas creaciones bajo las mismas condiciones.
2.jpg)