DOI:
https://doi.org/10.14483/23448393.1470Published:
2000-11-30Issue:
Vol. 6 No. 1 (2001): January - JuneSection:
Science, research, academia and developmentDiseño e implementación de un robot móvil basado en comportamientos
Desing and implementation of a behavior based robot mobile
Keywords:
robot, ultrasonido, obstáculos, colisión, comportamientos, explorar (es).Downloads
References
WATANABE M, ONOGUCHI K, KWEON I. KUNO Y. "Architecture of Behavior-based Mobile Robot in Dynamic Enviroment". IEEE Internacional Conference on Robotics and Automation. Nice: Mayo, 1992
KATHIB, O. «Real-time Obstacle Avoidance for Manipulators and Mobile Robots». IEEE Conference on Robotics and Automation. 1985.
HOLESTEIN, Alois A., BADREDDIN, Essam. "Colission Avoidance in a Behavior- based Mobile Robot Desing".: IEEE International Conference on Robotics and Automation. Sacramento: Abril 1991.
REYES, Castro Alejandro, RODRIGUEZ, Amorocho Liliana. «Diseño e implementación de un robot móvil basado en comportaminetos». Tesis de grado Universidad Distrital Francisco José de Caldas. Marzo de 2001
BORESTEIN, Johannn. KOREN, Yoram. "Error eliminating Rapida Ultrasonic Firing for a Mobile Robot Obstacle Avoidance". IEEE Transactions on Robotics and Automation. Vol. 11. No 1. Febrero, 1.995.
How to Cite
APA
ACM
ACS
ABNT
Chicago
Harvard
IEEE
MLA
Turabian
Vancouver
Download Citation
Ciencia, Investigación y Desarrollo
Ingeniería, 2001-00-00 vol:6 nro:1 pág:30-33
Diseño e implementación de un robot móvil basado en comportamientos
Desing and implementation of a behavior based robot mobile
Liliana Rodríguez Amorocho
Alejandro Reyes Castro
Resumen
En este documento se plantea una solución al problema de la detección y evasión de obstáculos de un robot que explora un ambiente dinámico desconocido. El robot hace un reconocimiento de su ambiente, gracias a la información obtenida de once eficientes sensores de proximidad, distancia y velocidad dispuestos a su alrededor. La información obtenida por los sistemas de detección de obstáculos, es procesada por un microcontrolador, para generar comandos que hacen que el robot evada los obstáculos y además busque espacios abiertos.
Palabras clave: robot, ultrasonido, obstáculos, colisión, comportamientos, explorar.
Abstract
This paper gives a solution to detect and avoid obstacles for a mobile robot exploring a dinamic and unknown environment. The robot gets infomation about its work space from twelve proximity, distance and velocity sensors mounted arround itself. A microcontroller computes this information to create control signals that let the robot avoid obstacles and find open spaces.
Key words: robot, ultrasound, obstacles, collision, behavior, to explore.
INTRODUCCIÓN
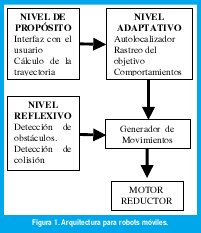
Como un aporte a la robótica en el país, la firma colombiana ROBOTEC Inc. pretende construir un robot móvil basado en la arquitectura propuesta por Watanabe [1], que consiste de tres niveles: Propósito, Adaptativo y Reflexivo, como se muestra en la figura 1. Para tal fin se iniciaron diversas investigaciones en robótica móvil auspiciadas por esta empresa. En este documento se trata el problema de la detección y evasión de obstáculos, que son funciones desempeñadas por el nivel reflexivo. Para la detección de obstáculos se emplean sensores de ultrasonido para que cubran un rango de 0cm a 2.5m y sensores de contacto para situaciones de emergencia. Por otra parte, para el sistema evasor, se hace uso del planteamiento de campos potenciales, que simula elementos de amortiguamiento alrededor del cuerpo del robot los cuales lo mantienen a una distancia prudente de los obstáculos. Para mostrar los resultados obtenidos con el nivel reflexivo, se implementa también, buena parte del nivel adaptativo del robot, que consiste básicamente en comportamientos tales como la identificación de salidas y la búsqueda de espacios libres de obstáculos.
I.OBJETIVO
El objetivo es crear un sistema de detección y evasión de obstáculos para un robot móvil como el mostrado en la figura 2, que supere los resultados obtenidos en las investigaciones que ROBOTEC Inc. ha desarrollado anteriormente. Con este fin se construyen eficientes sensores de proximidad, distancia y velocidad, basados en ultrasonido. Además, se plantearon flexibles algoritmos para la evasión de obstáculos otorgándole al móvil la capacidad de buscar salidas que lo conduzcan a espacios abiertos.
II. DETECCIÓN DE OBSTÁCULOS POR ULTRASONIDO
Para la detección de obstáculos, se implementaron sensores de distancia, velocidad y proximidad, basados en ultrasonido. Se emplean once cápsulas ultrasónicas emisor-receptor, MA40B7 dispuestas alrededor del robot, con una separación entre ellas de 30 grados.
Para la medición de distancia, basta con medir el tiempo que la señal de ultrasonido tarda en retornar a la cápsula luego de ser reflejada por un obstáculo. La distancia al obstáculo es proporcional al tiempo obtenido.
Donde v es la velocidad del sonido en el aire (343m/s). Con esta técnica, se puede asegurar una precisión de la medida de hasta 2cm, el rango máximo de medición logrado con el amplificador de ultrasonido implementado es de 4m, no obstante, para la aplicación en cuestión resulta innecesario tal rango y se restringió a 2.5m.
El sensor de velocidad se implementa a partir de la información obtenida del sensor de distancia. Cabe notar que en la medida de velocidad no se busca precisión alguna, ya que para los fines de la investigación, es suficiente tener un indicativo de cuan veloz se acerca o se aleja el obstáculo y no se requiere una medida precisa de su velocidad

Se realizaron pruebas de medición de velocidad y el sistema fue capaz de detectar variaciones de velocidad de 0m/s hasta 4m/s.
Para el sensor de proximidad, se empleó una propiedad del sensor de ultrasonido, observada mientras se diseñaba el sensor de distancia. Generalmente, cuando se consulta por la capacidad de medida de un sensor de ultrasonido, se obtienen rangos de medición de 20cm hasta 30m. El límite inferior del rango de medición depende de la capacidad de la cápsula para amortiguar los remanentes de la transmisión, y es un límite que se impone en la fabricación de la cápsula. El ringing, como se le denominan a esas oscilaciones, impide hacer medidas de distancia antes de que el material piezoeléctrico se relaje por completo. No obstante, la energía que alcanza a los obstáculos entre 0cm y 40cm de distancia, puede hacer muchas veces el recorrido entre la cápsula y el obstáculo, de esta manera, cuando la cápsula queda habilitada para medir (desaparición del ringing), el eco que ha rebotado n veces entre el obstáculo y el sensor genera una medida, que aunque no da certeza de la distancia, si asegura que un obstáculo se encuentra muy cerca.
III. EVASIÓN DE OBSTÁCULOS
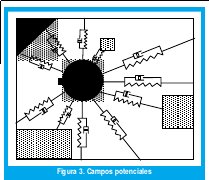
La información proveniente de los sensores, debe ser analizada para generar maniobras de evasión de obstáculos, dicho análisis se hace empleando una estrategia evasiva basada en campos potenciales. La construcción de un escudo virtual entorno al robot propuesta por Kathib [2], tiene muchas variantes, algunos autores modelan el sistema robot obstáculo como dos cargas de polaridad opuesta, otros crean elementos de resorte y amortiguamiento virtual alrededor del robot como se muestra en la figura 3, para generar fuerzas repulsivas proporcionales a la distancia entre el robot y los obstáculos [3].
Esto quiere decir que cada sensor de ultrasonido soporta una fuerza repulsiva producto de su interacción con un obstáculo presente en su área de trabajo, dicha fuerza es de la forma:

Donde Dmáx es de 2.5m, d es la distancia entre el obstáculo y el robot, v es la velocidad entre los mismos, k es la constante del resorte virtual y B es la fricción viscosa del amortiguador virtual. Las magnitudes de lasr constantes fueron elegidas para garantizar que FRESORTE - MAX tenga la misma magnir tud de FAMORTIGUADOR - MAX con lo que obtuvo k de 0.125 y B de 0.0625. Una vez se han obtenido las fuerzas parciales, se realiza una suma vectorial de las mismas para obtener la fuerza de repulsión total, que es un vector que apunta hacia la zona con menos riesgo de colisión.

IV. GENERADOR DE MOVIMIENTOS
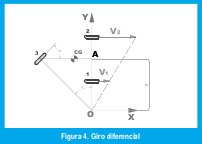
Los algoritmos de control manejarán un sistema de locomoción consistente en un carro con giro diferencial, que posee dos ruedas tractoras en su parte frontal y una rueda loca trasera, dicha disposición se ilustra en la figura 4. Las ruedas tractoras son manejadas por un motor DC de 12V y 4200rpm acoplado a la rueda por un reductor de relación 1:27. La máxima velocidad de este sistema es de 1m/s.
Gracias al giro diferencial, es posible realizar diversas y complejas maniobras, las velocidades de las ruedas necesarias para describir diversas curvas, se pueden obtener de las siguientes formulaciones:
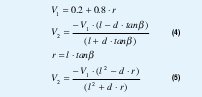
Donde V1 es la velocidad de la rueda externa del giro y V2 es la velocidad interna del giro. En tanto que r es el radio de la circunferencia que describe el giro, l y d son las dimensiones del robot y b es el ángulo que forma la rueda trasera con la vertical cuando las ruedas frontales están a la velocidad V1 y V2.
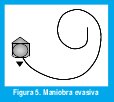
Con esta información se construyó una tabla de cincuenta posiciones (pasos) que relaciona las velocidades de la rueda interna y externa necesarias para que el móvil describa la curva mostrada en la figura 5.
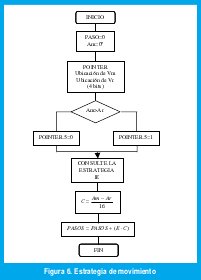
Considerando la dirección del vector de repulsión y la dirección actual del movimiento, se elige el valor de las velocidades V1 y V2 necesarias para que el robot se oriente hacia la zona libre de obstáculos que es señalada por el vector de repulsión. Para proteger el sistema mecánico de posibles fallos y sobreactuaciones de los sistemas de detección y evasión, se emplea una estrategia de movimiento (figura 6), con la que se evitan maniobras peligrosas como giros muy veloces, grandes aceleraciones o frenadas exageradas.
La variable POINTER en la figura 6 permite direccionar una tabla de datos en memoria, de la que se obtienen los valores de V1 y V2 necesarios para que el móvil alcance las coordenadas señaladas por el vector de rechazo a partir de la dirección de su movimiento actual
Si bien es cierto que el vector de rechazo mantiene al robot a una distancia segura de los obstáculos, no es conveniente planear rutas basadas únicamente en esta información. Una rutina de mayor prioridad se implementa con el ánimo de promover la búsqueda de salidas y espacios abiertos. Esta rutina de más alto nivel (nivel adaptativo), puede en muchas ocasiones llevar al robot a situaciones con riesgo de choque, cuando esto sucede el sistema solo se fiará de las ordenes dadas por el nivel reflexivo.
V. RESULTADOS EXPERIMENTALES
Para la evaluación de cada uno de los sistemas se realizó un seguimiento a los diferentes registros involucrados en los algoritmos, mediante la escritura en E2PROM, de sus valores en tiempo real. Esto permitió obtener los siguientes resultados en la detección de obstáculos:
- Para mediciones de distancia con obstáculos contundentes se logró un rango entre 15cm y 4 m y una eficiencia en la medición del 99 %.
- Para mediciones de distancia con obstáculos irregulares (telas, cortinas, etc.) se logró un rango entre 15cm y 60cm y una eficiencia en la medición del 90 %.
- Se logró estimar el cambio de velocidad para móviles desplazándose entre 0m/s y 3m/s como se indica en [4].
- Por otra parte para la evasión de obstáculos, se utilizó una metodología de prueba y error, para crear y mejorar los comportamientos. Con base en las descripciones del entorno almacenadas en la memoria de datos, se realizaron ajustes a la rutina de microcontrolador que aseguraban movimientos evasivos muy suaves e inteligentes, como por el ejemplo el buscar salidas en un ambiente cerrado. Se obtuvo que en al menos una de cada cinco oportunidades, el robot se animara a cruzar por una puerta presente en su lugar de trabajo en lugar de permanecer en el recinto.
CONCLUSIONES
La utilización de sensores ultrasónicos MA40B7 de MURATA ELECTRONICS fue fundamental para lograr los objetivos propuestos pues exhiben características muy favorables, que no tienen los sensores que se consiguen localmente.
El desarrollo de eficientes sensores de distancia, proximidad, velocidad y de contacto así como algoritmos optimizados, y de una mecánica especialmente desarrollada para este proyecto, logra superar de lejos el prototipo anterior desarrollado por Robotec Inc., el cual muestra fuertes deficiencias, tanto en el nivel reflexivo como en la parte mecánica.
El sensor de proximidad se logra diseñar con ultrasonido, gracias a la utilización de los ecos traseros, que en un comienzo aparecen como una desventaja. La utilización de este sensor es de especial importancia pues con él es innecesario el uso de sensores ópticos que requieren muchos más recursos tanto de hardware como de software con lo que se reducen los costos, sin sacrificar eficiencia.
Disminuir la potencia de transmisión, en la medida en que el robot se acerca a los obstáculos permite recorrer pasillos y atravesar puertas de una manera segura, ya que esto permite disminuir la distancia mínima sensable y reducir el ruido ultrasónico en el ambiente.
La potencia de transmisión es proporcional al número de pulsos transmitidos. Esto tiene como ventaja modificar la potencia de transmisión por software, sin necesidad de implementar un amplificador de ganancia controlada.
El uso de una memoria de datos E2PROM, facilita la depuración y evaluación del sistema en general, pues permite monitorear diversas variables, mientras se ejecuta el programa.
Con el desarrollo del sensor de velocidad se logra que el sistema se comporte de manera más eficiente ante los obstáculos en movimiento.
Si bien es cierto que el patrón de radiación de los sensores de ultrasonido empleados tiene un ángulo de apertura muy grande (44º) que dificulta la identificación de puertas o salidas, ser pudo constatar, que con la puesta en marcha de diversas estrategias (nivel adaptativo), se puede lograr superar esta deficiencia en la detección.
Se logra obtener una configuración multisensores muy eficiente. Implementar turnos para la obtención de las medidas, no sólo tiene como ventajas el utilizar de manera común los recursos de software y hardware disponibles para un sensor, sino además, se logran evitar los errores de medición debidos al crosstalk, todo esto sin sacrificar la rapidez en la obtención de los comandos hacia la parte mecánica [5].
El desarrollo de un nivel reflexivo robusto como el planteado en esta investigación puede ser punto de partida para nuevas e interesantes investigaciones. Por ejemplo, se puede implementar un sistema que acceda lugares contaminados o peligrosos para seres humanos, instalándole cámaras de vídeo estos lugares pueden ser monitoreados desde un lugar seguro. También puede cumplir la función de robot mensajero, en conjunto con el nivel de propósito. Si además, se le acondicionan grabadoras y reproductoras de audio se puede obtener un guía turístico, que describe los escenarios y evade a espectadores y objetos en el ambiente, siendo él mismo el espectáculo o la publicidad. Instalándole un brazo mecánico se puede lograr la manipulación y transporte de objetos pequeños, entre otras.
BIBLIOGRAFÍA
[1] WATANABE M, ONOGUCHI K, KWEON I. KUNO Y. "Architecture of Behavior-based Mobile Robot in Dynamic Enviroment". IEEE Internacional Conference on Robotics and Automation. Nice: Mayo, 1992
[2] KATHIB, O. «Real-time Obstacle Avoidance for Manipulators and Mobile Robots». IEEE Conference on Robotics and Automation. 1985.
[3] HOLESTEIN, Alois A., BADREDDIN, Essam. "Colission Avoidance in a Behavior- based Mobile Robot Desing".: IEEE International Conference on Robotics and Automation. Sacramento: Abril 1991.
[4] REYES, Castro Alejandro, RODRIGUEZ, Amorocho Liliana. «Diseño e implementación de un robot móvil basado en comportaminetos». Tesis de grado Universidad Distrital Francisco José de Caldas. Marzo de 2001
[5] BORESTEIN, Johannn. KOREN, Yoram. "Error eliminating Rapida Ultrasonic Firing for a Mobile Robot Obstacle Avoidance". IEEE Transactions on Robotics and Automation. Vol. 11. No 1. Febrero, 1.995.
Liliana Rodríguez Amorocho Ingeniera Electrónica, Universidad Distrital FJC. lilirod1@hotmail.co
Alejandro Reyes Castro Ingeniero Electrónico,Universidad Distrital FJC. alejosonyvi@hotmail.co
Creation date:
License
![]()
From the edition of the V23N3 of year 2018 forward, the Creative Commons License "Attribution-Non-Commercial - No Derivative Works " is changed to the following:
Attribution - Non-Commercial - Share the same: this license allows others to distribute, remix, retouch, and create from your work in a non-commercial way, as long as they give you credit and license their new creations under the same conditions.

2.jpg)



